Lời Cảm Ơn Để Thực Hiện Và Hoàn Thành Tốt Đồ Án Tốt Nghiệp Này, Em Đã Nhận Được Sự Giúp Đỡ Và Hướng Dẫn Tận Tình Của Các Thầy Cô Và Bạn Bè Ngành Công Nghệ Kỹ Thuật Điện Tử Truyền Thông Trường Cao Đẳng Công Nghệ ...
KẾT LUẬN Luận văn trên đã trình bày toàn bộ kiến thức về tổng quan của công nghệ truyền thông sử dụng ánh sáng nhìn thấy – VLC cũng như các ứng dụng phổ biến của nó trong đời sống con người. Qua luận văn này, em đã trình bày ...
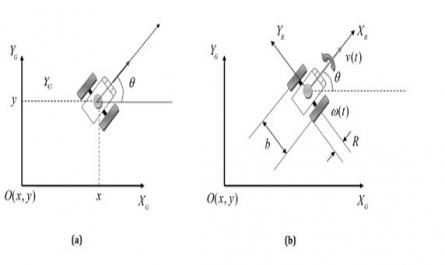
3.1.1. Cập nhật vị trí Mô hình động học (Kinematic model) mô tả sự ảnh hưởng của các hành động điều khiển lên cấu hình động học của robot. Cấu hình của một robot di động thông thường được biểu diễn bởi sáu biến bao gồm: ...
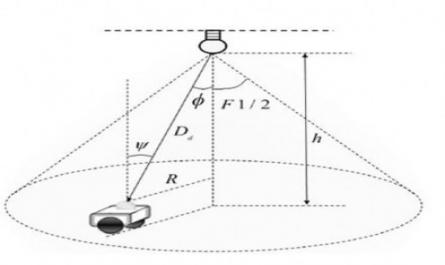
(4*) Hình 2.5. Các tham số trong phương pháp định vị RSS Phương trình (4*) là một hàm tính toán công suất quang nhận được P r theo khoảng cách giữa bộ phát và bộ nhận. Tất cả các điểm thỏa mãn phương trình (4*), hay nói cách khác là có ...
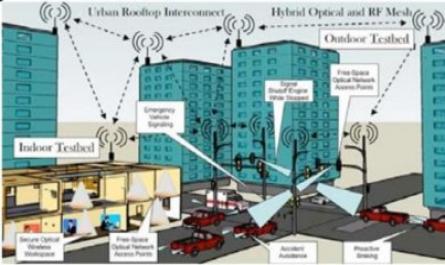
Hình 1.12. Sơ đồ khối của bộ nhận video và audio 1.3.3. Nhà thông minh Chiếu sáng thông minh là một yêu cầu rất cần thiết cho những ngôi nhà thông minh, trong khách sạn, bảo tàng,. Với việc kết hợp công nghệ VLC vào các thiết bị chiếu ...
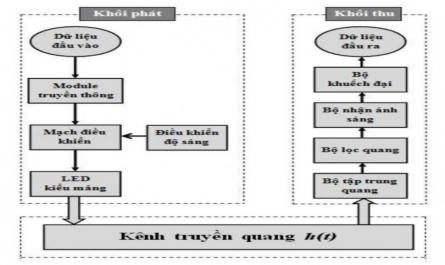
Hình 1.3. Sơ đồ khối của công nghệ VLC Trong thực tế, chúng ta không thể sử dụng một bộ điều khiển để điều khiển cho một đèn LED riêng lẻ bởi vì các hệ thống chiếu sáng sử dụng đèn LED thường có số lượng đèn rất lớn. Do ...
Bảng Nội dung Trang 1.1. So sánh những đặc tính của các công nghệ truyền thông VLC, IRB, RFB 10 2. 1. Các tham số hệ thống trong mô hình hệ thống VLC 29 LỜI NÓI ĐẦU Trong những thập kỉ vừa qua, công nghệ truyền thông sử dụng sóng vô tuyến ...
Trường Cao Đẳng Công Nghệ Thông Tin Hữu Nghị Việt - Hàn Khoa Công Nghệ Điện Tử Viễn Thông Đồ Án Tốt Nghiệp Ngành Công Nghệ Kỹ Thuật Điện Tử Truyền Thông Đề Tài Định Vị Robot Sử Dụng Công Nghệ Truyền Thông Ánh Sáng Nhìn Thấy ...
- Biến trở (CB MM) 5V - CT ở vị trí ON d-f 5V - CT ở vị trí ON - Biến trở ở vị trí mức 0 d-f 0V - CT ở vị trí ON - Biến trở ở vị trí mức max d-f 2.5V - CT ở vị trí ON - Biến trở ở vị trí mức chính giữa - Biến trở(CB TĐ) b-c 5V - CT ...
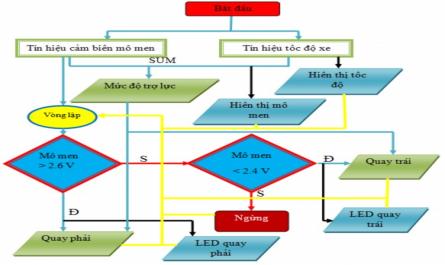
Lưu Đồ hoạt động của mô hình Chương V : HỆ THỐNG LÁI TRỢ LỰC ĐIỆN 5.1.MÔ HÌNH HOÀN CHỈNH : Hình 5.1 Mô hình hoàn chỉnh 5.1.1 Các chân trên mô hình: Hình 5.2 Các chân trên xa bàn Ký hiệu các chân: IG: Dương sau công tắc :12V B:Dương ACCU. ...
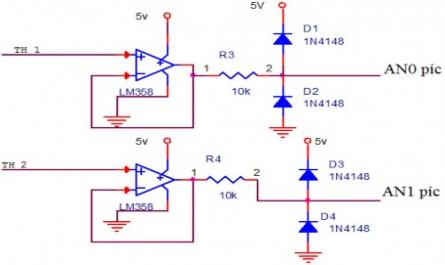
Ra có sự biến đổi liên tục làm cho các tín hiệu dễ bị nhiễu khi hoạt động, vì vậy chế tạo mạch lặp điện áp để tránh sự nhiễu trước khi đưa tín hiệu tới pic là điều cần thiết. Cũng giống như đã trình bày về cảm biến, ...
C1 - Cảm biến mô men (chính) Khoảng 2.5V - Khi công tắc ON vô lăng ở vị trí chạy thẳng. - Kiểm tra điện áp chân C 1 và C 3 C2 - Cảm biến mô men (phụ) Khoảng 2.5V - Khi công tắt ở vị trí ON vô lăng ở vị trí chạy thẳng. - Kiểm tra hiệu ...
Trang 2474, Trang 2475, Trang 2476, Trang 2477, Trang 2478, Trang 2479, Trang 2480, Trang 2481, Trang 2482, Trang 2483,