Hình 1.12. Sơ đồ khối của bộ nhận video và audio
1.3.3. Nhà thông minh
Chiếu sáng thông minh là một yêu cầu rất cần thiết cho những ngôi nhà thông minh, trong khách sạn, bảo tàng,... Với việc kết hợp công nghệ VLC vào các thiết bị chiếu sáng, không chỉ tạo nên mạng chiếu sáng thông minh mà còn tạo thành các điểm truy cập không dây, giúp người sử dụng có thể dễ dàng sử dụng các dịch vụ giải trí cũng như truy cập Internet. Quan trọng nhất là người dùng có thể điều khiển ngôi nhà của mình thông qua công nghệ này như đóng cửa, tự động bật nhạc, tự động dọn vệ sinh,...
1.3.4. Hệ thống giao thông thông minh
Công nghệ truyền thông bằng ánh sáng nhìn thấy không chỉ được sử dụng trong môi trường trong nhà mà nó còn được ứng dụng trong cả môi trường ngoài trời, đặc biệt là trong hệ thống giao thông thông minh. Các phương tiện giao thông có thể giao tiếp với nhau thông qua các bộ thu phát tín hiệu VLC để giảm thiểu những tai nạn đáng tiếc. Bên cạnh đó, các phương tiện giao thông cũng có thể kết nối đến các đèn giao thông hoặc đèn chiếu sáng ở hai bên đường để định vị hay truy cập Internet. Hình 1.13 minh họa hệ thống giao thông thông minh sử dụng công nghệ VLC.
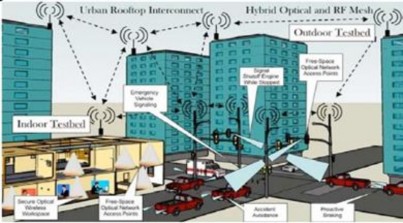
Hình 1.13. Hệ thống giao thông thông minh
1.3.5. Định vị và dẫn đường
Có thể bạn quan tâm!
-

 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2 -
 Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led
Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led -
 Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa)
Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa) -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Xem toàn bộ 61 trang tài liệu này.
Định vị và dẫn đường là hai bài toán rất phổ biến trong các ứng dụng của điện thoại thông minh hay robot trong môi trường trong nhà, ví dụ như hệ thống e-mart (hệ thống siêu thị điện tử) trong siêu thị. Dựa trên các tham số như công suất nhận, màu sắc, tần số hay các yếu tố hình học,... chúng ta có thể dễ dàng ứng dụng công nghệ VLC để giải quyết cái bài toán định vị.

Hình 1.14. Hệ thống dẫn đường E-mart trong siêu thị
1.4. Tóm tắt chương một
Trong chương này chúng ta đã thảo luận các vấn đề cơ bản liên quan đến công nghệ truyền thông không dây sử dụng ánh sáng nhìn thấy – VLC có dải tần rộng từ 400 (Hz) đến 800 (Hz). Hệ thống VLC sử dụng đèn LED trắng để làm nguồn phát với các ưu điểm vượt trội của nó so với các loại đèn phát sáng thông thường như đèn huỳnh quang và đèn sợi đốt như tiêu thụ công suất thấp, độ sáng cao, tuổi thọ cao, dễ dàng điều khiển độ sáng,... tuy rằng nó vẫn còn gặp phải một số nhược điểm. Mô hình chi tiết và các đặc trưng cơ bản của một hệ thống VLC cũng được mô tả và thảo luận chi tiết trong nội dung của chương một. Một số ứng dụng phổ biến của công nghệ VLC sẽ được liệt kê trong phần cuối cùng của chương này.
CHƯƠNG II – CÁC PHƯƠNG PHÁP ĐỊNH VỊ SỬ DỤNG CÔNG NGHỆ VLC TRONG MÔI TRƯỜNG TRONG NHÀ
Định vị là một trong những thách thức lớn đối với những nhà khoa học trong lĩnh vực nghiên cứu về robot di động. Đó là quá trình xác định chính xác vị trí và hướng của robot trong môi trường làm việc của nó. Nói đến định vị, chắc hẳn chúng ta sẽ nghĩ đến hệ thống định vị toàn cầu GPS rất phổ biến. Đây có thể là sự lựa chọn đơn giản và hiệu quả cho các thiết bị di động nói chung và robot di động nói riêng. Tuy nhiên, GPS chỉ hoạt động tốt đối với môi trường ngoài trời với sai số lên đến vài mét, trong khi đó đối với các ứng dụng cần độ chính xác cao trong môi trường trong nhà thì GPS không phải là một giải pháp tối ưu. Đó là một trong những lí do tại sao vấn đề định vị robot trong nhà vẫn luôn được quan tâm nghiên cứu để đưa ra những giải pháp phù hợp và hiệu quả nhất.
Cho đến nay, có rất nhiều giải pháp đã được áp dụng cho định vị robot trong nhà như các hệ thống sử dụng cảm biến hồng ngoại, laser, cảm biến siêu âm, sóng vô tuyến,... Trong đó, nhận dạng bằng sóng vô tuyến (RFID) từng được sử dụng như một giải pháp chính trong định vị robot. Các hệ thống định vị bằng Wifi cũng đã được nghiên cứu và chứng minh về tính khả thi thông qua thực nghiệm.
Trong những năm gần đây, cùng với sự phát triển nhanh chóng của công nghệ chế tạo đèn LED trắng, định vị robot dựa trên công nghệ VLC - truyền thông sử dụng ánh sáng nhìn thấy được xem xét như một giải pháp thay thế đầy hứa hẹn với nhiều điểm ưu việt. So với các công nghệ truyền thông không dây khác như RF hay Wifi thì công nghệ VLC ít ảnh hưởng tới sức khỏe của người sử dụng, đồng thời còn được sử dụng cho mục đích chiếu sáng. Ngoài ra, đèn LED trắng còn có hiệu suất rất cao, độ che phủ rộng và cho phép tăng cường công suất truyền tải. Một ưu điểm khác của đèn LED là có tuổi thọ rất cao, có thể lên tới 1.000.000 giờ chiếu sáng, cho phép tiết kiệm chi phí khi thực hiện các hệ thống định vị qua công nghệ VLC.
Trong nội dung của chương này, chúng ta sẽ tìm hiểu về một số phương pháp định vị robot trong nhà sử dụng công nghệ VLC đã được đề suất và nghiên cứu từ trước đến nay. Các phương pháp định vị này có điểm chung là đều ứng dụng các mô hình hình học vào quá trình xác định vị trí. Thông qua việc thảo luận chi tiết các
phương pháp định vị này, chúng ta sẽ phân tích những ưu, nhược điểm cũng của từng phương pháp.
2.1. Phương pháp định vị dựa trên thời gian sóng ánh sáng tới (TOA)
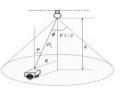
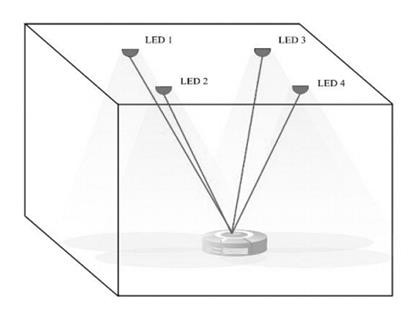
Trong phương pháp này, các đèn LED đóng vai trò như nguồn phát tín hiệu còn PD được đặt trên robot sẽ hoạt động giống như một bộ nhận tín hiệu. Dựa vào tọa độ của các đèn LED và khoảng cách từ robot đến các đèn LED, chúng ta có thể tìm được vị trí của robot. Khoảng cách này chính là khoảng cách truyền tín hiệu ánh sáng được tính toán từ mối quan hệ giữa thời gian truyền và vận tốc ánh sáng. Để tính được khoảng cách truyền chúng ta chỉ cần đo thời gian tới của sóng ánh sáng ở bộ nhận do vận tốc ánh sáng cố định c = 3.108 (m/s). Tuy nhiên, ánh sáng được phát ra từ các đèn LED theo hình dạng nón, do đó tồn tại một tập hợp điểm mà tại đó nhận được thời gian ánh sáng truyền đến là như nhau. Tập hợp các điểm này là quỹ tích của một đường tròn tưởng tượng có tâm là hình chiếu vuông góc của LED trên mặt sàn di chuyển của robot (xem hình 2.1).
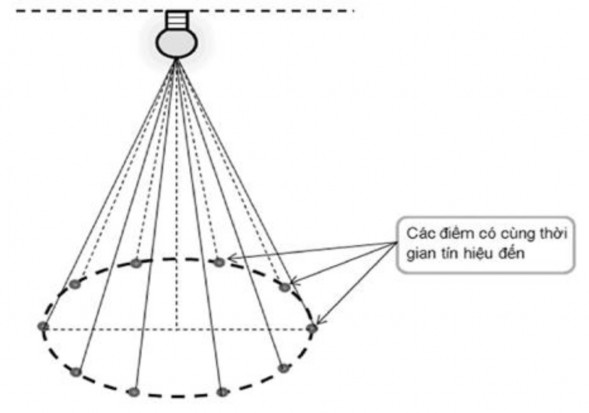
Hình 2.1. Đường tròn tưởng tượng chứa các điểm nhận được thời gian truyền ánh sáng như nhau.
Như vậy, ứng với mỗi đèn LED chúng ta sẽ nhận được một phương trình đường tròn tưởng tượng. Nếu robot nằm giữa vùng phủ của nhiều đèn LED thì chúng ta sẽ nhận được một tập các phương trình của các đường tròn tưởng tượng. Giải hệ các phương trình này sẽ cho chúng ta vị trí của robot. Nói cách khác, vị trí của robot chính là giao điểm của các đường tròn nói trên.
Giả sử, vị trí của robot là (x, y) và vị trí cho trước của bộ phát thứ i là (xi , yi ) , i = 1, 2…M; trong đó M là số lượng bộ phát. Khoảng cách từ bộ phát thứ i đến robot (được kí hiệu là di) và thời gian truyền tín hiệu ánh sáng (được kí hiệu là ti) trong trường hợp không có nhiễu được tính như sau:
 , i = 1,2…M
, i = 1,2…M

(1*)
Tuy nhiên trong thực tế, do ảnh hưởng của vật cản hoặc do môi trường không đồng nhất,... sẽ gây ra sai số trong phép đo thời gian truyền tín hiệu ánh sáng. Giả sử sai số tác động lên phép đo trên được kí hiệu là ni, khi đó công thức (1*) sẽ được viết lại như sau:

(2*)
Khi đó, các đường tròn tưởng tượng sẽ không thể giao nhau tại một điểm duy nhất mà chúng sẽ tạo ra một vùng giao cắt. Hay nói cách khác, hệ phương trình (2*) sẽ có vô số nghiệm. Khi đó, robot sẽ nằm trong vùng giao cắt của các đường tròn tưởng tượng.
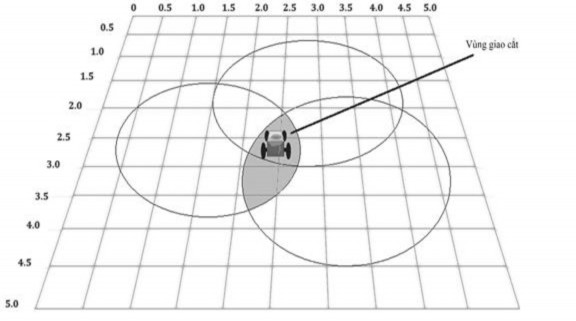
Hình 2.2.Vị trí robot trong vùng giao cắt của các đường tròn tưởng tượng
Phương pháp định vị dựa trên thời gian sóng ánh sáng tới (TOA) có một số ưu điểm nổi bật như: mô hình phần cứng yêu cầu rất đơn giản đối cả bộ phát và bộ nhận, đáp ứng tốt trong môi trường sóng ánh sáng lan truyền thẳng (LOS). Tuy nhiên, phương pháp này không được ứng dụng rộng rãi do có một số hạn chế. Thứ nhất, vì đây là phương pháp định vị dựa trên thời gian sóng ánh sáng tới nên để đạt được độ chính xác cao, bộ phát và bộ nhận cần được đồng bộ với nhau sau mỗi khoảng thời gian cố định. Thứ hai, trong các mô hình phòng nhỏ (cỡ một vài mét vuông), thời gian mà ánh sáng được truyền đi từ bộ phát đến bộ nhận rất ngắn (chỉ cỡ vài nano giây). Điều này dẫn đến việc đo thời gian truyền sóng ánh sáng gặp rất nhiều khó khăn, cần phải có một phần cứng có tốc độ cao. Ngoài ra, phương pháp này cũng cần nhiều bộ phát để tạo ra được vùng giao cắt. Chúng ta cần sử dụng ít nhất ba nguồn phát khác nhau để cung cấp thông tin cho bộ nhận trong trường hợp này.
2.2. Phương pháp định vị dựa trên độ chênh lệch thời gian của các sóng ánh sáng tới (TDOA)
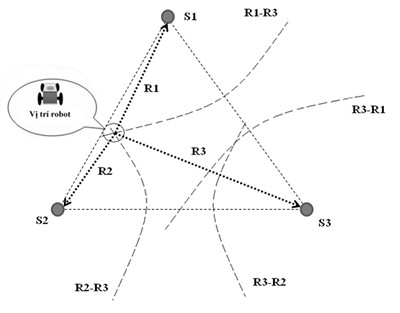
Phương pháp định vị TDOA được áp dụng cho các ứng dụng yêu cầu độ chính xác cao trong việc định vị. Tương tự như phương pháp TOA, phương pháp TDOA cũng xác định vị trí robot thông qua mối quan hệ giữa khoảng cách truyền tín hiệu ánh sáng và thời gian truyền. Tuy nhiên, phương pháp TDOA không tính toán khoảng cách truyền tín hiệu ánh sáng trực tiếp từ bộ phát tới bộ nhận mà thay vào đó là tính độ chênh lệch giữa các khoảng cách truyền từ các bộ phát tới bộ nhận (xem hình 2.3). Bộ
nhận sẽ đo thời gian tới của sóng ánh sáng phát ra từ ít nhất ba đèn LED khác nhau. Do vận tốc ánh sáng là không đổi, nên chúng ta có thể dễ dàng tính toán được vị trí của robot dựa trên sự chênh lệch về khoảng cách từ các bộ phát đến bộ nhận.
Hình 2.3. Mô hình hệ thống của phương pháp TDOA
Ý tưởng của phương pháp này khá đơn giản đó là so sánh thời gian đến của các tín hiệu nhận được theo từng cặp:

![]()
Trong đó,
dij là độ chênh lệch khoảng cách giữa các bộ phát đến bộ nhận; c là
vận tốc ánh sáng; ij là độ chênh lệch thời gian truyền tín hiệu ánh sáng; (x, y) là tọa độ
của robot và
(xi , yi ), (x j , y j )
lần lượt là tọa độ của bộ phát thứ i và j.
Phương trình trên có dạng đường hyperbol với hai tiêu điểm lần lượt là tọa độ của các bộ phát thứ i và j. Do đó, phương pháp TDOA còn được gọi là phương pháp định vị hyperbol (xem hình 2.4). Vị trí của robot được tính toán bằng cách tìm điểm giao cắt của các đường hyperbol này.
Hình 2.4. Phương pháp định vị hyperbol
Vì đều dựa trên thời gian truyền tín hiệu ánh sáng đến nên cả hai phương pháp TDOA và TOA có những ưu điểm và hạn chế giống nhau. Tuy nhiên, trong phương pháp TDOA, chúng ta chỉ cần đồng bộ cho tất cả các bộ phát để phát các tín hiệu ánh sáng đi trong cùng một thời điểm. Hạn chế lớn nhất của cả hai phương pháp này là thời gian tín hiệu ánh sáng tới bộ nhận rất ngắn (chỉ vài nano giây). Vì lý do này nên các phần cứng phải có tốc độ xử lí cao, khả năng tính toán trong thời gian ngắn.
2.3. Phương pháp định vị dựa trên cường độ tín hiệu nhận được (RSS)
Giả sử, chúng ta có một kênh truyền không dây sử dụng ánh sáng nhìn thấy được trình bày chi tiết trong mục 1.2.4. Khi đó, chúng ta có thể định vị vị trí của robot bằng việc đo công suất của tín hiệu quang nhận được tại PD. Sau đó, bộ nhận sẽ tính toán khoảng cách từ nó đến bộ phát (các đèn LED) dựa trên mô hình truyền tín hiệu qua kênh ánh sáng nhìn thấy được.
Khi đó, công suất quang Pr của kênh truyền ánh sáng nhìn thấy nhận được tại
PD là:

(3*)
Chúng ta có thể dễ dàng nhận thấy góc của ánh sáng tới ψ bằng với góc rọi của ánh sáng ϕ trong hình 2.5. Do đó, công thức (3*) được viết lại như sau: