KẾT LUẬN
Luận văn trên đã trình bày toàn bộ kiến thức về tổng quan của công nghệ truyền thông sử dụng ánh sáng nhìn thấy – VLC cũng như các ứng dụng phổ biến của nó trong đời sống con người. Qua luận văn này, em đã trình bày một số kiến thức về mô hình kênh truyền quang và các loại nhiễu trong công nghệ VLC. Đây là những kiến thức cơ bản và cần thiết để phục vụ cho các chương tiếp theo.
Nội dung chính trong luận văn đó là trình bày các phương pháp định vị robot sử dụng công nghệ VLC. Thông qua việc đánh giá ưu nhược điểm của các phương pháp định vị đó, đề suất một phương pháp định vị kết hợp AOA–RSS có độ chính xác cao xấp xỉ 20 (cm). Phương pháp định vị kết hợp AOA–RSS là sự kết hợp của hai phương pháp AOA và RSS nhằm đạt được các ưu điểm của cả hai phương pháp trên cũng như giải quyết được những mặt hạn chế của chúng.
Tuy nhiên, sai số của phương pháp định vị kết hợp AOA–RSS vẫn khá cao, chưa đáp ứng được yêu cầu về độ chính xác của các ứng dụng định vị robot trong môi trường trong nhà. Do đó, bộ lọc Kalman đã được áp dụng để nâng cao độ chính xác của phương pháp định vị kết hợp AOA–RSS bằng cách kết hợp các thông tin vị trí của robot từ hệ thống và phép đo AOA–RSS. Bằng cách này, bộ lọc Kalman đã nâng cao độ chính xác của phương pháp định vị kết hợp AOA–RSS với sai số chỉ một vài cm.
Định vị cho robot trong môi trường trong nhà là một vấn đề cấp thiết, thu hút được sự quan tâm lớn của các nhà nghiên cứu trên thế giới. Qua luận văn này, em mong muốn đóng góp nghiên cứu của mình nhằm ứng dụng công nghệ truyền thông mới sử dụng ánh sáng nhìn thấy trong bài toán định vị robot. Ngoài ra, trong tương lai, công nghệ VLC không chỉ được áp dụng trong bài toán định vị mà nó sẽ được phát triển trong các ứng dụng dẫn đường cho robot trong các tòa nhà như siêu thị, trung tâm mua sắm lớn, các bảo tàng,...
TÀI LIỆU THAM KHẢO
[1]. Gordon Povey (2011). “How green is Visible Light Communications”.
Avaiablefrom: http://visiblelightcomm.com/how-green-is-visible-light-communications/.
Có thể bạn quan tâm!
-

 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2 -
 Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led
Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led -
 Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa)
Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa) -
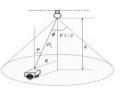 Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa)
Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa) -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6
Xem toàn bộ 61 trang tài liệu này.
[2]. Ghassemlooy Z., Popoola W., Rajbhandari S. (2013), Optical Wireless communications, System and Channel Modeling with MATLAB, Taylor & Francis Group, Boca Raton.
[3]. Toshihiko Komine (2005), “Visible Light Wireless Communications and Its Fundamental Study”. Available from: http://iroha.scitech.lib.keio.ac.jp:8080/sigma
/bitstream/handle/10721/2017/document.pdf?sequence=4 .
[4]. Toshihiko Komine (2004), “Fundamental Analysis for Visible-Light communication System using LED Lights”, IEEE Transactions on Consumer Electronics, vol. 50, pp. 100-107.
[5]. Garcia J., Dalla-Costa M.A., Cardesin J., Alonso J.M. and Rico-Secades M. (2009), “Dimming of high-brightness LEDs by means of luminous flux thermal estimation”, IEEE Transactions on Power Electronics, vol. 24, pp. 1107– 1114.
[6]. Chen J., Ai Y. and Tan Y. (2008), “Improved free space optical communications performance by using time diversity”, Chin. Optics Letters, vol. 6, pp. 797–799.
[7]. Czaputa M., Javornik T., Leitgeb E., Kandus G. and Ghassemlooy Z. (2011), “Investigation of punctured LDPC codes and time-diversity on free-space optical links”, Proceedings of the 11th International Conference on Telecommunications (ConTEL), pp. 359–362.
[8]. Kahn J.M., Barry J.R., (1997), “Wireless infrared communications”,
Proceedings of the IEEE, vol. 25, pp. 265-298.
[9]. Zabih Ghassemlooy, Paul Anthony Haigh, Francesco Arca, Sandro Francesco Tedde, Oliver Hayden, Ioannis Papakonstantinou, and Sujan Rajbhandari (2013), “ Visible light communications: 3.75 / data rate with a 160 kHz bandwidth organic photo-detector and artificial neural network equalization”, Photonics Research, vol. 1, pp. 65-68.