- Cảm biến mô men (chính) | Khoảng 2.5V | - Khi công tắc ON vô lăng ở vị trí chạy thẳng. - Kiểm tra điện áp chân C1 và C3 | |
C2 | - Cảm biến mô men (phụ) | Khoảng 2.5V | - Khi công tắt ở vị trí ON vô lăng ở vị trí chạy thẳng. - Kiểm tra hiệu điện thế chân C2 và C3 |
C3 | - Chân mass của cảm biến mô men | 0V | |
C4 | - Nguồn 5V cung cấp cho cảm biến mô men | Khoảng 5V | - Khi công tắt ON kiểm tra điện thế chân C4 và C3 |
Có thể bạn quan tâm!
-
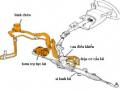
 Vị Trí Lắp Đặt Và Chức Năng Của Các Bộ Phận.
Vị Trí Lắp Đặt Và Chức Năng Của Các Bộ Phận. -
 Cấu Tạo Và Hoạt Động Của Các Bộ Phận.
Cấu Tạo Và Hoạt Động Của Các Bộ Phận. -
 Các Hư Hỏng Thường Gặp Và Cách Khắc Phục.
Các Hư Hỏng Thường Gặp Và Cách Khắc Phục. -
 Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 9
Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 9 -
 Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 10
Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 10 -
 Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 11
Thiết kế chế tạo mô hình hệ thống lái trợ lực điện - 11
Xem toàn bộ 92 trang tài liệu này.
Bảng 3.4 Điện áp bình thường của các bộ phận trong hệ thống
Chương IV: THIẾT KẾ, CHẾ TẠO MÔ HÌNH HỆ THỐNG LÁI TRỢ LỰC ĐIỆN
4.1 MÔ TẢ MÔ HÌNH.
Với mô hình hệ thống lái trợ lực điện trên xe suzuki mô hình sẽ minh họa được quá trình trợ lực cho người lái.
Mô hình được phân thành 3 phần chính:
- Phần thiết kế khung
- Thiết lập cơ cấu hãm (tạo mô men cản của mặt đường)
- Phần thiết kế xa bàn
- Phần mạch điều khiển
4.2 PHẦN THIẾT KẾ:
Để gắn được các bộ phận lên khung như: vô lăng, trục lái, sa bàn... thì phần khung phải được thiết kế chế tạo sao cho đúng theo kích thước các bộ phận và tối ưu trong việt sử dụng và di chuyển.

Hình 4.1 Hình chiếu bằng của khung

Hình 4.2 Hình chiếu cạnh của khung

Hình 4.3 Hình chiếu 3D
4.3 CHẾ TẠO CƠ CẤU HÃM:
Mặc dù ở trên mô hình, nhưng chúng em cố gắng chế tạo ra cơ cấu hãm, để cho người lái có cảm giác giống như đang cầm lái trên xe, với cơ cấu này nó sẽ giúp chúng ta nhận thấy sự tham gia của cơ cấu trợ lực.

Hình 4.4 Cơ cấu trên hệ thống
ở trên mô hình này chúng em sử dụng loại phanh bố trên xe đạp, nhằm kiềm hãm trục lái ở mức độ có thể thay đổi tùy vào người vận hành mô hình.
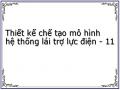
4.4 PHẦN THIẾT KẾ SA BÀN:
Thiết kế phần sa bàn nhằm thể hiện tất cả các tín hiệu cũng như phần điều khiển mô hình. với cấu tạo mô hình hệ thống lái, san bàn được thiết kế khung với chiều dài 70 và chiều rộng 40.
Hình 4.5 Cơ cấu sa bàn
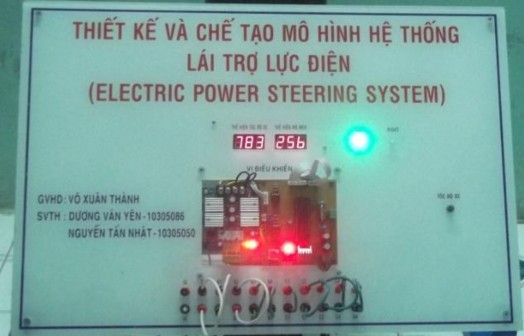
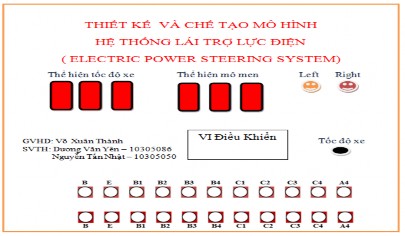
Hình 4.6 Sa bàn thực tế
4.5 PHẦN MẠCH ĐIỀU KHIỂN:
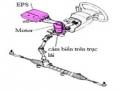
Trên hệ thống lái trợ lực điện thì bộ phận quan trọng nhất là hộp EPS, thì với mô hình này sẽ không ngoại lệ,với phần mạch điều khiển sẽ có nhiệm vụ suất tín hiệu trợ lực. Mạch điều khiển sẽ được phân ra 2 quá trình:
Quá trình thiết kế mạch.
Quá trình lập trình.
4.5.1 Quá Trình Thiết kế mạch.
Pic18F4431.
Trong quá trình nghiên cứu và phân tích các tín hiệu và đặc điểm của hệ thống lái. trợ lực điện, thì pic18F4431 là bộ phận đảm nhiệm vai trò không kém phần quan trọng.

Hình 4.7. Pic 18F4431.
Có cấu tạo 40 chân, pic có nhiệm vụ là nhận tín hiệu từ cảm biến momen và tín hiệu từ tín hiệu tốc độ xe. Mô hình đã thay thế cảm biến tốc độ xe bằng biến trở để giả tín hiệu. Mô hình chỉ thiết lập 2 tín hiệu quan trọng là cảm biến momen và cảm biến tốc độ xe. Vì thời gian có hạn nên một số chức năng chưa được hoàn thiện.
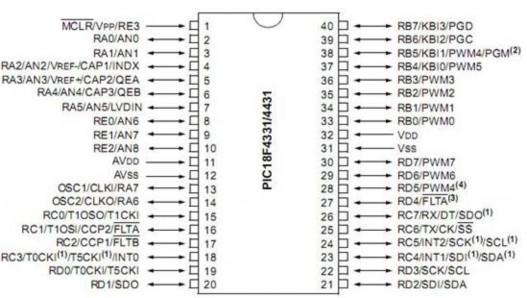
Hình 4.8 Ký hiệu các chân của pic
Với các chân của píc đều có các nhiệm vụ khác nhau, suất tín hiệu, nhận tín hiệu cụ thể như:
PORT A:
Là port I/O, có tất cả 6 chân, từ RA0 đến RA5. Trong đó RA2 và RA3 có thể dùng tiếp nhận điện áp vref+ và Vref-
RA4 còn là ngò vào xung clock cho timer0. RA5 có thể làm chân chọn phụ cho port chuỗi đồng bộ
PORT B:
Là port I/O, Có 8 chân có thể lập trình bởi phần mềm để làm chức năng kéo lên cho tất cả ngò vào.
RB0 có thể làm chân ngắt ngoài.
RB3 có thể làm ngò vào lập trình điện thế thấp.
Các chân còn lại có thể làm ngò vào ngắt trên chân, lập trình với xung và dữ liệu chuổi. PORT C:
Là port I/O có 8 chân, RC0 dùng làm ngò ra bộ dao động Timer1 hoặc ngò vào xung timer1.
RC1, RC2 có cùng 3 chức năng: làm ngò ra PWM, so sánh, lấy mẫu, RC1 còn là ngò vào bộ dao động Timer1.
RC3 là ngò vào xung tuần tự dao động đồng bộ hoặc ra (với chế độ SPI và I2C). RC4 làm chân nhận dữ liệu (chế độ SPI) hay data I/O (chế độ I2C).
RC5 có thể xuất dữ liệu SPI (chế độ SPI).
RC6 có thể làm chân phát bất đồng bộ (USART) hoặc xung đồng bộ. PORT D:
Là port I/O có thể dùng làm port slave song song khi giao tiếp vơi 1 bus vi xử lý PORT E:
PORT I/O này thường dùng điều khiển chọn/đọc/ghi cho port slave song song. Các chân khác:
Chân 13 (ÓSC1/CLKIN) tiếp nhận xung ngoài cho bộ dao động thạch anh bên trong.
Chân 14 (OSC2/CLOUT) làm ngò ra bộ dao động thạch anh. ở chế độ RC, chân này có
tần số bằng 14 của OSC1.
Chân 1: làm ngò vào reset.
Chân 12, 31 là nối đất Vss, chân 11, 32 là chân cấp nguồn cho píc.
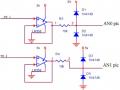
Mạch tạo tín hiệu cảm biến tốc độ xe .
Như đã trình bày, với mạch cảm biến tốc độ xe chúng em sẽ giã tín hiệu bằng biến trở. Mạch sẽ có nhiệm vụ đưa tín hiệu về cho pic dưới dạng điện áp khác nhau khi chúng ta xoay biến trở, điều đó minh họa cho tốc độ của xe.
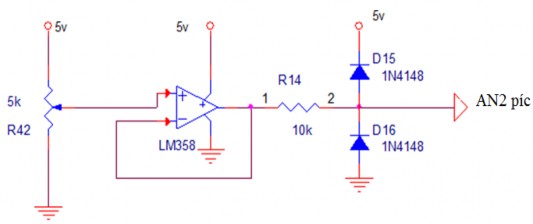
Hình 4.8 Mạch tạo tín hiệu tốc độ xe
Khi xoay biến trở sẽ làm thay đổi điện áp từ 0- 5V tùy vào vị trí mà chúng ta xoay
.Với mạch lặp điện áp được thiết kế nối sau biến trở làm thay đổi kháng trở của tín hiệu mà không làm thay đổi giá trị điện áp của tín hiệu, diode1N4148 dùng để bảo vệ khi điện áp bị tăng đột ngột hay trong quá trình sử dụng có sự nhầm lẫn về nguồn, tránh hư hại cho pic.
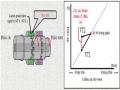
Mạch nhận cảm biến momen.
Tín hiệu cảm biến có được là do tài xế tác động lực lên vô lăng, với cấu tạo cảm biến, sẽ nhận biết lực, chiều và xuất tín hiệu ra dưới dạng điện áp. Nhưng điện áp đưa