TRƯỜNG CAO ĐẲNG CÔNG NGHỆ THÔNG TIN HỮU NGHỊ VIỆT - HÀN
KHOA CÔNG NGHỆ ĐIỆN TỬ VIỄN THÔNG
ĐỒ ÁN TỐT NGHIỆP
NGÀNH CÔNG NGHỆ KỸ THUẬT ĐIỆN TỬ TRUYỀN THÔNG
ĐỀ TÀI
ĐỊNH VỊ ROBOT SỬ DỤNG CÔNG NGHỆ TRUYỀN
THÔNG ÁNH SÁNG NHÌN THẤY ĐƯỢC KẾT HỢP VỚI BỘ LỌC KALMAN
SVTH: Hoàng Như Việt Lớp: CCVT06B
GVHD: Nguyễn Thị Huyền Trang
Đà Nẵng, tháng 6 năm 2016
…………………………………………………………………………………………………...
……………………………………………………………………………………………...........
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
Điểm: …………………….……… (Bằng chữ: …..……………….)
Đà Nẵng, ngày tháng 6 năm 2016
GIÁO VIÊN HƯỚNG DẪN
Nguyễn Thị Huyền Trang
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
…………………………………………………………………………………………………...
Điểm: …………………….……… (Bằng chữ: …..……………….)
Đà Nẵng, ngày tháng 6 năm 2016
GIÁO VIÊN PHẢN BIỆN
NHẬN XÉT CỦA GIÁO VIÊN HƯỚNG DẪN i
NHẬN XÉT CỦA GIÁO VIÊN PHẢN BIỆN iii
MỤC LỤC iv
THUẬT NGỮ VIẾT TẮT vi
DANH MỤC HÌNH VẼ viii
DANH MỤC BẢNG BIỂU ix
LỜI NÓI ĐẦU 1
CHƯƠNG I – TỔNG QUAN VỀ CÔNG NGHỆ VLC – TRUYỀN THÔNG SỬ DỤNG ÁNH SÁNG NHÌN THẤY 3
1.1. Đèn LED trắng 3
1.1.1. Một vài nét sơ lược 3
1.1.2. Các đặc trưng 5
1.1.2.1. Cường độ chiếu sáng 5
1.1.2.2. Công suất quang truyền 5
1.1.3. Ưu nhược điểm 6
1.1.3.1. Ưu điểm 6
1.1.3.2. Nhược điểm 7
1.2. Mô tả hệ thống VLC 7
1.2.1. Mô hình hệ thống 7
1.2.2. Cấu hình đường truyền 11
1.2.3. Kênh IM-DD 12
1.2.4. Công suất quang nhận 13
1.3. Ứng dụng và một số sản phẩm thực tế 14
1.3.1. Truyền thông di động 14
1.3.1.1. Truyền thông di động thế hệ sau 4G 14
1.3.1.2. Truyền thông trong các môi trường đặc biệt 15
1.3.2. Truyền hình 15
1.3.3. Nhà thông minh 16
1.3.4. Hệ thống giao thông thông minh 16
1.3.5. Định vị và dẫn đường 17
1.4. Tóm tắt chương một 17
CHƯƠNG II – CÁC PHƯƠNG PHÁP ĐỊNH VỊ SỬ DỤNG CÔNG NGHỆ VLC TRONG MÔI TRƯỜNG TRONG NHÀ 18
2.1. Phương pháp định vị dựa trên thời gian sóng ánh sáng tới (TOA) 19
2.2. Phương pháp định vị dựa trên độ chênh lệch thời gian của các sóng ánh sáng tới (TDOA) 21
2.3. Phương pháp định vị dựa trên cường độ tín hiệu nhận được (RSS) 23
2.4. Phương pháp định vị dựa trên góc của sóng ánh sáng tới (AOA) 24
2.5. Phương pháp định vị kết hợp AOA-RSS 27
2.5.1. Mô hình hệ thống 27
2.5.2. Nhiễu hệ thống 28
2.5.3. Cơ chế hoạt động 29
2.5.3.1. Bước 1 – Xác định hướng của robot 29
2.5.3.2. Bước 2 – Xác định tọa độ của robot 29
2.6. Tóm tắt chương hai 30
CHƯƠNG III – ÁP DỤNG BỘ LỌC KALMAN MỞ RỘNG TRONG ĐỊNH VỊ ROBOT 31
3.1. Mô hình hệ thống: Cấu hình động học 31
3.1.1. Cập nhật vị trí 32
3.1.2. Sai số hệ thống 33
3.2. Mô hình phép đo 34
3.3. Bộ lọc Kalman 35
3.3.1. Ước đoán vị trí 36
3.3.2. Hiệu chỉnh vị trí 38
3.4. Tóm tắt chương ba 39
KẾT LUẬN 40
TÀI LIỆU THAM KHẢO 41
THUẬT NGỮ VIẾT TẮT
Fourth Generation | Mạng di động thế hệ thứ tư | |
5G | Fifth Generation | Mạng di động thế hệ thứ năm |
AOA | Angle of Arrival | Góc của tia sáng tới |
AOA– RSS | Angle of Arrival – Received Signal Strength | Kết hợp hai phương pháp AOA và RSS |
DC | Direct Current | Dòng trực tiếp |
DD | Direct Detection | Tách sóng trực tiếp |
FET | Field Effect Transistor | Transitor hiệu ứng trường |
FOV | Field of View | Trường thu nhận ánh sang |
GPS | Global Positioning System | Hệ thống định vị toàn cầu |
IEEE | Institute of Electricaland Electronics Engineers | Viện kỹ thuật điện và điện tử |
IM | Intensity Modulation | Điều chế cường độ |
IR | Infrared | Hồng ngoại |
IRB | Infrared Band | Dải bước song hồng ngoại |
KF | Kalman Filter | Bộ lọc Kalman |
LED | Light Emitting Diode | Đi-ốt phát quang |
LOS | Light of Sight | Phương truyền thẳng |
LS | Least square | Bình phương tối thiểu |
LTE | Long-Term Evolution | Mạng 4G |
MIMO | Multi Input – Multi Output | Kỹ thuật sử dụng nhiều đầu vào và đầu ra |
NLOS | Non Light of Sight | Phương truyền gián tiếp |
OOK | On-Off Keying | Điều chế ON/OFF |
PD | Photodiode | Bộ nhận quang |
RF | Radio Frequency | Sóng vô tuyến |
RFB | Radio Frequency Band | Dải sóng vô tuyến |
RFID | Radio Frequency Identification | Nhận dạng dựa vào tần số sóng vô tuyến |
RSS | Received Signal Strength | Cường độ tín hiệu nhận |
Có thể bạn quan tâm!
-

 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2 -
 Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led
Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led -
 Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa)
Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa) -
 Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa)
Phương Pháp Định Vị Dựa Trên Góc Của Sóng Ánh Sáng Tới (Aoa) -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Xem toàn bộ 61 trang tài liệu này.
Time Difference of Arrival | Độ chênh lệch về thời gian của các tia sáng tới | |
TOA | Time of Arrival | Thời gian của tia sáng tới |
VLC | Visible Light Communications | Công nghệ truyền thông sử dụng ánh sáng nhìn thấy |
YAG | Yttrium Aluminum Garnet | Granat ytri-nhôm |
TDOA
Nội dung | Trang | |
1.1. | Vùng ánh sáng nhìn thấy trong phổ bức xạ điện từ | 4 |
1.2. | Các loại đèn LED trắng cơ bản | 5 |
1.3. | Sơ đồ khối của công nghệ VLC | 8 |
1.4. | Sơ đồ khối cho cơ chế điều chỉnh độ sáng của đèn LED | 9 |
1.5 | Mô hình thực tế của công nghệ VLC trong môi trường trong nhà | 10 |
1.6. | Phân loại đường truyền của hệ thống VLC | 12 |
1.7. | Kênh IM/DD trong công nghệ VLC | 12 |
1.8. | Mô hình truyền nhận ánh sáng trực tiếp (LOS) | 13 |
1.9. | Công nghệ truyền thông VLC ứng dụng trong phòng họp | 14 |
1.10. | Công nghệ VLC được sử dụng trong bệnh viện | 15 |
1.11. | Sơ đồ khối của bộ phát video và audio | 15 |
1.12. | Sơ đồ khối của bộ nhận video và audio | 16 |
1.13. | Hệ thống giao thông thông minh | 16 |
1.14. | Hệ thống dẫn đường E-mart trong siêu thị | 17 |
2.1. | Đường tròn tưởng tượng chứa các điểm nhận được thời gian truyền ánh sáng như nhau. | 19 |
2.2. | Vị trí robot trong vùng giao cắt của các đường tròn tưởng tượng | 21 |
2.3. | Mô hình hệ thống của phương pháp TDOA | 22 |
2.4. | Phương pháp định vị hyperbol | 23 |
2.5. | Các tham số trong phương pháp định vị RSS | 24 |
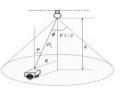
2.6. | Mô hình hệ thống của phương pháp định vị AOA | 25 |
2.7. | Mô hình và các thông số hệ thống | 25 |
2.8. | Kịch bản mô phỏng thuật toán định vị AOA | 26 |
2.9. | Mô hình hệ thống kết hợp AOA-RSS sử dụng mảng PD | 28 |
3.1. | Mô hình robot hai bánh vi sai a) Trạng thái của hệ thống robot b) Robot trong hệ tọa độ địa phương và toàn cục | 32 |
3.2. | Ứng dụng thông thường của bộ lọc Kalman | 36 |
3.3. | Sơ đồ minh họa ứng dụng của bộ lọc Kalman trong định vị robot | 36 |