(4*)
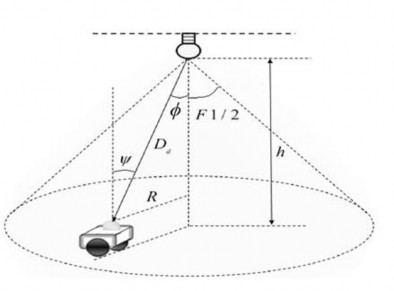
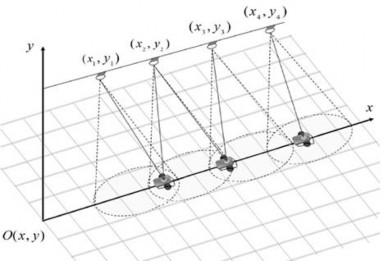
Hình 2.5. Các tham số trong phương pháp định vị RSS
Phương trình (4*) là một hàm tính toán công suất quang nhận được Pr theo khoảng cách giữa bộ phát và bộ nhận. Tất cả các điểm thỏa mãn phương trình (4*), hay nói cách khác là có cùng công suất Pr sẽ nằm trên một đường tròn tưởng tượng có tâm là hình chiếu thẳng đứng của đèn LED lên mặt phẳng sàn. Phương pháp định vị này cũng cần ít nhất ba bộ phát để xác định được điểm giao cắt giữa các đường tròn tưởng tượng tạo bởi phương trình (4*). Giống như hai phương pháp định vị trên, vị trí của robot sẽ là giao điểm của các đường tròn tưởng tượng này.
Qua việc khảo sát ba phương pháp định vị nói trên, chúng ta có thể dễ dàng nhận thấy được rằng điểm chung của cả ba phương pháp định vị nói trên là vị trí của robot được xác định dựa trên việc hình thành các đường tròn hoặc các đường hypebol tưởng tượng. Phương trình biểu diễn của những đường này được thiết lập thông qua mối quan hệ giữa khoảng cách với thời gian sóng tới hoặc công suất quang nhận được.
2.4. Phương pháp định vị dựa trên góc của sóng ánh sáng tới (AOA)
Góc của sóng ánh sáng tới (AOA) được định nghĩa là góc giữa hướng truyền của một sóng ánh sáng tới và hướng của nguồn tham khảo (đèn LED), hay còn gọi là góc định hướng.
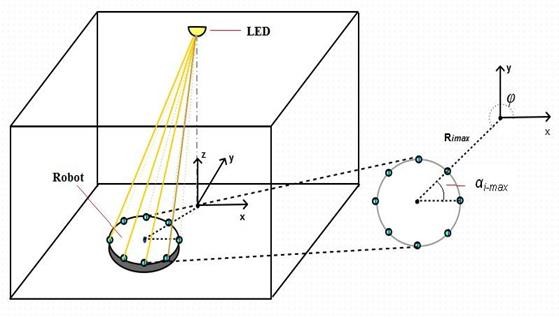
Một mô hình của phương pháp định vị dựa trên góc ánh sáng. Mô hình này sử dụng một mảng các PD được gắn trên một khung nửa đường tròn như trong hình 2.6 thay vì sử dụng một PD cho bộ nhận.
Số lượng PD được gắn trên bộ nhân ảnh hưởng trực tiếp đến độ chính xác của phương pháp AOA. Số lượng PD càng nhiều thì sai số sẽ càng nhỏ. Góc của PD thứ i được tính như sau:
i i / (K1)
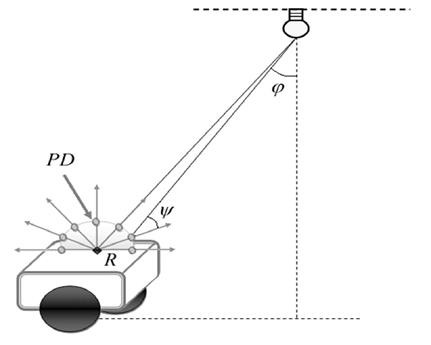
Hình 2.6. Mô hình hệ thống của phương pháp định vị AOA
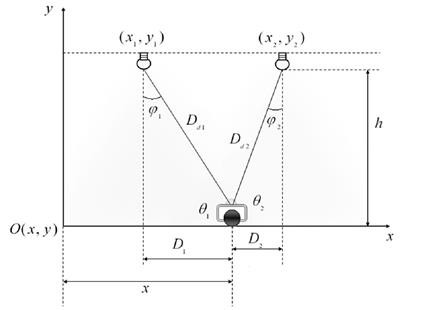
Hình 2.7. Mô hình và các thông số hệ thống
Để đạt độ chính xác cao, phương pháp định vị AOA sử dụng thuật toán trọng số để xác định góc của ánh sáng tới. Góc ước lượng AOA được tính như sau:
![]()
Trong ![]() đó, là công suất của tín
đó, là công suất của tín
hiệu điện nhận được tại đầu ra của PD thứ i; trọng số cm được xác định như sau:
![]()
Sau đó, khoảng cách giữa các đèn LED1 và LED2 đến bộ nhận lần lượt là Dd1
và Dd2 được tính toán từ độ cao h của đèn LED và góc ước lượng 1 và 2
như sau:
![]()
Cuối cùng, tọa độ một chiều của robot sẽ được xác định như sau (xem hình 2.7):
Trong đó:


Hình 2.8. Kịch bản mô phỏng thuật toán định vị AOA
Hình 2.8 mô tả kịch bản mô phỏng của thuật toán định vị AOA theo một chiều. Phương pháp AOA cũng có những ưu điểm giống với các phương pháp đã trình bày ở trên đó là đáp ứng tốt trong môi trường phủ sóng ánh sáng có phương truyền thẳng (LOS), đạt được độ chính xác cao khi sử dụng một mảng gồm nhiều PD ở bộ nhận.
Ngoài ra, phương pháp định vị AOA không yêu cầu việc đồng bộ giữa bộ phát và bộ nhận. Tuy nhiên, phương pháp này cũng gặp phải một số hạn chế như yêu cầu phần cứng phức tạp (một mảng gồm nhiều PD cần chi phí và kích thước khá lớn và rất khó để lắp đặt trên bộ nhận) và chỉ có khả năng xác định vị trí của robot theo một một chiều.
2.5. Phương pháp định vị kết hợp AOA-RSS
Chúng ta đã thảo luận về một số phương pháp định vị sử dụng phương pháp hình học dựa trên công nghệ truyền thông ánh sáng nhìn thấy VLC. Các ưu, nhược điểm của các phương pháp định vị này cũng đã được trình bày và so sánh kỹ lưỡng trong phần trước. Các phương pháp định vị TOA và TDOA rất khó triển khai trong các ứng dụng định vị trong nhà do thời gian truyền sóng ánh sáng rất ngắn và yêu cầu đồng bộ thời gian giữa bộ phát và bộ nhận hay giữa các bộ nhận với nhau. Phương pháp định vị RSS đạt được độ chính xác không cao, nhất là khi ở trong các môi trường có mô hình kênh truyền quang có suy hao lớn. Cuối cùng là phương pháp AOA, tuy phương pháp này đạt được độ chính xác cao do áp dụng kỹ thuật MIMO (sử dụng mảng các đèn LED và PD) nhưng lại yêu cầu phần cứng phức tạp và chỉ có khả năng cung cấp thông tin định vị một chiều. Qua những ưu, nhược điểm của các phương pháp định vị nói trên, trong mục này chúng ta sẽ xét một phương pháp định vị mới, đó là kết hợp hai phương pháp định vị AOA và RSS. Phương pháp này sẽ đạt được các ưu điểm của cả hai phương pháp định vị AOA và RSS, đồng thời nó cũng giải quyết các mặt hạn chế của cả hai phương pháp định vị nói trên.
2.5.1. Mô hình hệ thống
Mô hình hệ thống của phương pháp kết hợp AOA-RSS được mô tả trong hình
2.9. Các PD được gắn cách đều nhau trên một khung tròn phẳng. Mảng PD này sẽ được gắn trên robot di động để đo các tín hiệu quang nhận được từ các đèn LED để xác định hướng của robot. Vị trí của các PD được tính toán từ vị trí của robot và ngược lại. Nghĩa là, nếu ta biết được vị trí của robot ta có thể tính được vị trí của các PD như sau:
![]()
![]()
Trong đó, là góc của PD thứ i trong mảng; θ là hướng của robot.
Hình 2.9. Mô hình hệ thống kết hợp AOA-RSS sử dụng mảng PD
Ngược lại, khi tính được góc của các PD từ công suất của tín hiệu quang nhận được, chúng ta có thể dễ dàng tính toán được vị trí của robot di động. Giống như phương pháp định vị AOA, số lượng PD được gắn trên bộ nhận ảnh hưởng trực tiếp tới hiệu suất của phương pháp định vị này
2.5.2. Nhiễu hệ thống
Như đã được đề cập trong các hệ thống của các phương pháp định vị RSS và AOA, công suất tín hiệu quang nhận được tại mỗi PD được tính toán như sau:

Để thực hiện việc truyền tín hiệu ánh sáng nhìn thấy đến bộ thu trong kênh truyền quang, chúng ta cần thực hiện điều chế tín hiệu theo một phương pháp điều chế nào đó. Trong phạm vi luận văn này, giả sử điều chế OOK được sử dụng để tạo ra các xung tín hiệu vuông được truyền đi. Tín hiệu điện tại đầu ra của các PD chứa các nhiễu Gauss bao gồm tạp âm kim (shot noise), nhiễu nhiệt (thermal noise) và can nhiễu giữa các kí tự (inter-symbol interference-ISI).
Tuy nhiên, nhiễu ISI có thể coi là không đáng kể khi thời gian tín hiệu truyền đi đủ dài. Do đó, nguồn nhiễu chủ yếu được gây ra bởi tạp âm kim và ồn nhiệt:
![]()
Do đó, công suất tín hiệu điện thực tế nhận được tại PD thứ i được xác định như
sau:
![]() (5*)
(5*)
Trong đó, các thông số hệ thống và nhiễu được cho trong bảng 2.1 dưới đây.
Bảng 2. 1. Các tham số hệ thống trong mô hình hệ thống VLC
Giá trị | |
Công suất truyền quang (Pt ) | 0.02 [W] |
Góc nửa công suất (ϕ) | 30 [deg. |
Góc FOV của PD (Ψc) | 70 [deg.] |
Diện tích bề mặt của PD (A) |
|
Độ lợi của bộ lọc quang (Ts(Ψ)) | 1.0 |
Độ nhạy thu () | 0.54 [A/W] |
Tốc độ truyền dữ liệu (B) | 100 [Mb/s] |
Dòng điện nền (Ibg) |
|
Điện dung cố định (η) |
|
Độ hỗ dẫn FET (gm) |
|
Hệ số nhiễu kênh FET (Γ) | 1.5 |
Hệ số băng thông nhiễu (I2) | 0.562 |
Khuếch đại thế vòng hở (G) | 10 |
Có thể bạn quan tâm!
-

 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 1 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 2 -
 Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led
Sơ Đồ Khối Cho Cơ Chế Điều Chỉnh Độ Sáng Của Đèn Led -
 Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa)
Phương Pháp Định Vị Dựa Trên Thời Gian Sóng Ánh Sáng Tới (Toa) -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 6 -
 Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Định vị robot sử dụng công nghệ truyền thông ánh sáng nhìn thấy được kết hợp với bộ lọc Kalman - 7
Xem toàn bộ 61 trang tài liệu này.
2.5.3. Cơ chế hoạt động
Phương pháp định vị kết hợp AOA-RSS được tiến hành theo hai bước sau:
2.5.3.1. Bước 1 – Xác định hướng của robot
Trong bước này, phương pháp kết hợp AOA–RSS sẽ xác định hướng của nó so với các bộ phát mà nó đang kết nối bằng việc sử dụng cấu hình đặc biệt của hệ thống – mảng tròn các PD. Dựa vào công suất tín hiệu điện nhận được tại đầu ra của các PD, robot có thể xác định được PD thứ i nhận được công suất lớn nhất. Điều đó có nghĩa rằng, PD thứ i nằm ở gần bộ phát nhất. Do đó, robot chọn góc của PD này là góc giữa hướng của robot và hướng từ hình chiếu của tâm đèn LED đến tâm của robot (xem hình 2.9).
2.5.3.2. Bước 2 – Xác định tọa độ của robot
![]()
Trong bước này, phương pháp kết hợp AOA-RSS sẽ tính toán tọa độ của robot dựa trên góc AOA ![]() . Khoảng cách từ hình chiếu vuông góc của đèn LED đến PD nhận được công suất tín hiệu lớn nhất
. Khoảng cách từ hình chiếu vuông góc của đèn LED đến PD nhận được công suất tín hiệu lớn nhất ![]() được tính theo công thức (5*). Tọa độ toàn cục của robot di động ( ) được tính như sau:
được tính theo công thức (5*). Tọa độ toàn cục của robot di động ( ) được tính như sau:
Trường hợp 1: Khi robot nằm ở vị trí thỏa mãn điều kiện ![]() r
r
![]()
Trường hợp 2: Khi robot nằm ở vị trí thỏa mãn điều kiện ![]() r
r
![]()
Trong đó, φ là góc giữa đường thẳng nối từ hình chiếu của LED trên mặt phẳng di chuyển của robot đến PD mà tại đó nhận được công suất lớn nhất và trục Ox (xem hình 2.9). Góc φ có thể dễ dàng được tính từ góc AOA ![]() . Ngoài ra,
. Ngoài ra, ![]() ) là tọa độ của LED mà robot đang kết nối đến.
) là tọa độ của LED mà robot đang kết nối đến.
Đối với các mô hình trong nhà thông thường như: văn phòng, bảo tàng, thư viện, nhà máy,... những nơi có các hành lang dài có độ rộng hai mét, các đèn LED được lắp đặt cách đều nhau với khoảng cách 1.5 mét. Độ bao phủ của đèn LED có bán kính đạt tới 1.732 mét (được tính toán từ các thông số trong Bảng 2.1). Khi đó, robot di động luôn nằm dưới vùng phủ của ít nhất hai đèn LED nên độ chính xác của phương pháp định vị này được tăng cường vì robot luôn tiếp nhận thông tin từ ít nhất hai nguồn phát khác nhau.
Độ chính xác của phương pháp định vị kết hợp AOA-RSS chịu sự tác động của hai tham số chính là số lượng PD được gắn trên robot và các nhiễu Gauss. Tăng số lượng PD là một phương án đơn giản để cải thiện độ chính xác cho phép đo.
2.6. Tóm tắt chương hai
Trong nội dung của chương này, chúng ta đã đề cập đến vấn đề định vị robot trong môi trường trong nhà và tầm quan trọng của nó đối với các hệ thống robot tự trị. Trọng tâm của cả chương là trình bày các phương pháp định vị vị trí của các robot di động sử dụng công nghệ VLC - truyền thông ánh sáng nhìn thấy đã được nghiên cứu từ trước đến nay.
CHƯƠNG III – ÁP DỤNG BỘ LỌC KALMAN MỞ RỘNG TRONG ĐỊNH VỊ ROBOT
Trong chương hai của luận văn này, em đã đề cập đến các phương pháp định vị cho robot di động trong các môi trường trong nhà như văn phòng, nhà xưởng, viện bảo tàng,... dựa trên công nghệ VLC - truyền thông ánh sáng nhìn thấy. Trong đó phương pháp định vị mới (AOA-RSS) kết hợp hai phương pháp định vị truyền thống AOA và RSS để đạt hiệu suất cao hơn, cũng như loại trừ một số nhược điểm của từng phương pháp riêng lẻ. Tuy nhiên, đối với các ứng dụng của robot trong môi trường trong nhà thì sai số của phương pháp định vị vẫn khá cao. Để làm giảm sai số cho phương pháp định vị nói trên, chúng ta cần xem xét một phương pháp có khả năng kết hợp nó với thông tin từ hệ thống của robot. Bộ lọc Kalman (KF) là một kỹ thuật phổ biến trong lý thuyết ước lượng do nó dễ thực hiện và hiệu quả hơn các kỹ thuật khác.
Trong nội dung của chương này, chúng ta sẽ giải quyết vấn đề làm thế nào để áp dụng thuật toán bộ lọc Kalman mở rộng cho một hệ thống robot phi tuyến nhằm tăng hiệu suất của phương pháp định vị sử dụng công nghệ VLC.
3.1. Mô hình hệ thống: Cấu hình động học
Tất cả các robot di động trong thực tế đều cần có một cơ cấu truyền động để cho phép chúng có khả năng di chuyển trong không gian làm việc của nó. Các loại hệ thống truyền động thông thường bao gồm: cơ cấu truyền động sử dụng bánh xe, cơ cấu truyền động sử dụng chân, cơ cấu truyền động sử dụng bánh xích. Các robot sử dụng cơ cấu truyền động chân có khả năng di chuyển trong các địa hình gồ ghề hay leo cầu thang, trong khi các robot sử dụng cơ cấu truyền động bánh xe và bánh xích chỉ có thể di chuyển trong các địa hình phẳng, ít gồ ghề. Trong thực tế, các robot sử dụng bánh xe thường đơn giản, do đó nó được sử dụng nhiều nhất trong các ứng dụng dân sự cũng như quân sự. Một số loại robot di động phổ biến trong đời sống hằng ngày có thể kể đến như là: các robot hút bụi; các robot làm hướng dẫn viên trong các viện bảo tàng hay các phòng trưng bày tác phẩm nghệ thuật; các robot vận chuyển hàng hóa, vật liệu trong các nhà máy,... Do đó, trong giới hạn của luận văn này chúng ta sử dụng mô hình robot hai bánh vi sai để thực hiện phân tích.