Bằng các phép biến đổi giải tích, các kết quả thu được là [20]:
1
2
(2 2)2
2
s
(2 2)
s
e s
(1.83)
Như vậy hệ chính có cản được thay thế bằng hệ chính không cản với tần số tương đương được tính theo (1.83). Đây là một kết quả hết sức ý nghĩa, từ đây cho phép sử dụng các phương pháp giải tích tìm theo số tối ưu, chẳng hạn như phương pháp hai điểm cố định để xác định các tham số tối ưu cho bộ hấp thụ dao động trong trường hạn hệ chính có cản nhớt.
1.2.5. Tính toán tham số tối ưu trong trường hợp hệ chính có nhiều bậc tự do
Các nghiên cứu ở trên là đối với cơ hệ mà hệ chính có một bậc tự do. Vì hệ kết cấu thường có nhiều bậc tự do nên lời giải giải tích cho hệ một bậc tự do chỉ là lời giải gần đúng khi áp dụng cho hệ nhiều bậc tự do. Các nghiên cứu về TMD cho hệ nhiều bậc tự do chịu kích động ngẫu nhiên đã được Nguyễn Đông Anh và các cộng sự nghiên cứu trong [68], [69], có mô hình như sau (hình 1.11)
m0
F0
(TMD)
![]()
x0
F
k0 c0
mn
n
![]()
xn
kn cn
k2
F1
m1
c2
k1
c1
m2
. . . . .F.2. .
x2
x1
Hình 1.11 Bộ hấp thụ dao động và hệ chính nhiều bậc tự do
Trong các nghiên cứu này việc tính toán tìm nghiệm giải tích cho các thông số tối ưu gặp khó khăn, bởi vậy các tác giả đã sử dụng phương pháp số.
Trên cơ sở kế thừa phương pháp hai điểm cố định, GS Vakakis và các cộng sự [70], [71] phát triển phương pháp này cho hệ chính nhiều bậc tự do. Với kỳ vọng nghiệm tối ưu được biểu diễn dưới dạng giải tích nên mô hình trong nghiên cứu này là mô hình nhiều bậc tự do nhưng giả thuyết tần số dao động riêng của mỗi bậc tự do là như nhau. Đối với hệ nhiều bậc tự do mà tần số dao động riêng của mỗi bậc khác nhau thì phải sử dụng phương pháp số với sự trợ giúp của máy tính. [70], [71]
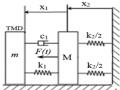
Tuy nghiên cứu đã xác định được hàm khuếch đại biên độ A cho bậc tự do thứ N của mô hình gốc (mô hình dịch chuyển một chiều) ở dạng giải tích. Nhưng với trường hợp hệ chính có nhiều bậc tự do, chẳng hạn 2 bậc tự do như trên hình 1.12, biểu thức giải tích tối ưu của tỉ số α (công thức 1.84) được xác định bằng cách lập bảng giá trị (bảng 1.3) khi thay đổi tham số đầu vào và sử dụng phép hồi quy toán học (xấp xỉ).
opt
6 52
10 15 72 3
(1.84)
Bảng 1.3. Bảng số liệu đầu vào cho phép hồi quy toán học.
αopt | β1 | β2 | β3 | A1=A2 | A3 | |
0.05 | 0.598 | 0.566 | 0.647 | 1.613 | 8.689 | 21.976 |
0.1 | 0.58 | 0.54 | 0.652 | 1.61 | 6.21 | 11.419 |
0.2 | 0.565 | 0.527 | 0.626 | 1.634 | 5.696 | 2.086 |
0.3 | 0.532 | 0.486 | 0.629 | 1.621 | 4.531 | 1.925 |
0.4 | 0.502 | 0.455 | 0.625 | 1.61 | 3.668 | 1.807 |
0.5 | 0.463 | 0.417 | 0.629 | 1.577 | 2.879 | 1.577 |
0.8 | 0.401 | 0.362 | 0.601 | 1.556 | 2.333 | 2.241 |
1 | 0.369 | 0.333 | 0.583 | 1.548 | 2.134 | 1.986 |
2 | 0.26 | 0.239 | 0.508 | 1.512 | 1.64 | 1.487 |
5 | 0.137 | 0.130 | 0.383 | 1.468 | 1.28 | 1.195 |
10 | 0.077 | 0.074 | 0.291 | 1.444 | 1.146 | 1.098 |
Có thể bạn quan tâm!
-
 Mô Hình Bộ Hấp Thụ Dao Động Dạng Con Rãnh Trượt Tròn.
Mô Hình Bộ Hấp Thụ Dao Động Dạng Con Rãnh Trượt Tròn. -
 Một Số Bộ Thông Số Tối Ưu Của Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Một Bậc Tự Do Không Cản Chịu Kích Động Ồn Trắng.
Một Số Bộ Thông Số Tối Ưu Của Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Một Bậc Tự Do Không Cản Chịu Kích Động Ồn Trắng. -
 Tính Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Chính Có Cản Nhớt.
Tính Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Chính Có Cản Nhớt. -
 Mô Phỏng Số Dao Động Xoắn Của Trục Máy Có Lắp Bộ Hấp Thụ Dva.
Mô Phỏng Số Dao Động Xoắn Của Trục Máy Có Lắp Bộ Hấp Thụ Dva. -
 Nghiên Cứu, Phân Tích, Tính Toán Và Xác Định Các Tham Số Tối Ưu Của Bộ Hấp Thụ Dao Động Dva
Nghiên Cứu, Phân Tích, Tính Toán Và Xác Định Các Tham Số Tối Ưu Của Bộ Hấp Thụ Dao Động Dva -
 Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1,
Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1,
Xem toàn bộ 153 trang tài liệu này.
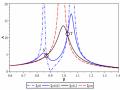
Hình 1.13 mô tả rằng dạng đường cong của tỷ số α cho trường hợp hệ chính có 1 bậc tự do và 2 bậc tự do là tương đương nhau.
Tỷ số cản nhớt ξ trong nghiên cứu này được xác định ở dạng số phụ thuộc vào số liệu dạng số của các thông số đầu vào.
Hình 1.12. Mô hình hệ chính 2 bậc tự do
Hình 1.13. Đồ thị tỷ số tối ưu α theo μ
1.2.6. Một số tiêu chuẩn để xác định bộ hấp thụ dao động thụ động.
Phương pháp của Den Hartog [29] như trình bày ở phần trên được thiết lập trên cơ sở làm giảm thiểu chuyển dịch của hệ chính. Điều này cho phép bảo đảm tính an toàn và nguyên vẹn của hệ máy cũng như kết cấu dưới tác động của ngoại lực. Tuy nhiên dưới tác động của kích động làm cho cơ hệ có gia tốc lớn cũng gây ra tác động bất lợi như các phần tử của cơ hệ không thực hiện được các chức năng của chúng, gây vỡ hỏng nền hay gây khó chịu cho người sử dụng; vì vậy giảm thiểu gia tốc của cơ hệ cũng là một tiêu chuẩn để lựa chọn các thông số của bộ hấp thụ dao động thụ động.
Cũng phân tích tương tự như vậy, rất nhiều các tiêu chuẩn khác cũng được dùng để xem xét bởi rất nhiều tác giả. Các tiêu chuẩn để tính toán bộ hấp thụ được điểm lại như sau:
a) Làm giảm chuyển vị của hệ chính, Den Hartog [29], Thompson [58], Jacquot và Hoppe [37], Fujino và Abe [32].
b) Tăng độ cứng động của hệ chính, Falcon et al. [33].
c) Tăng hiệu quả giảm chấn của bộ hấp thụ năng lượng, Luft [39].
d) Tiêu chuẩn hỗn hợp: giảm chuyển vị của hệ chính và nâng cao hiệu quả giảm chấn của bộ hấp thụ dao động, Luft [39].
e) Làm giảm thiểu chuyển vị tương đối của bộ hấp thụ dao động so với hệ chính, Luft [39].
f) Làm giảm thiểu vận tốc của hệ chính, Warburton [67].
g) Làm giảm thiểu gia tốc của hệ chính, Ioi và Ikeda [36], Warbuton [67].
h) Làm giảm thiểu lực tác động lên hệ chính, Warburton [67].
i) Làm giảm thành phần dao động tần số riêng, Nguyễn Đông Anh, Nguyễn Bá Nghị [2], [15]
j) Làm giảm dao động tự do, Nguyễn Đông Anh, Phạm Minh Vương [5].
1.3. Kết luận chương 1.
Chương 1 tác giả đã tổng quan các nghiên cứu trong nước và quốc tế về giảm dao động xoắn cho trục máy; tổng quan về bộ hấp thụ dao động DVA, trình bày nguyên lý cơ bản của bộ hấp thụ dao động thụ động, đưa ra các phương pháp tính bộ hấp thụ dao động thụ động cho hệ chính có cản và không cản; tổng quan các nghiên cứu xác định tham số tối ưu trong trường hợp hệ chính có nhiều bậc tự do. Cuối chương tác giả đưa ra một số tiêu chuẩn để xác định bộ hấp thụ dao động thụ động. Đây là các cơ sở để tác giả nghiên cứu xác định các tham số tối ưu của bộ hấp thụ dao động thụ động DVA giảm dao động cho xoắn cho trục máy khi chịu tác dụng của các loại kích động khác nhau như: kích động điều hòa, kích động va chạm, kích động ngẫu nhiên… trong các chương sau.
CHƯƠNG 2 . PHƯƠNG TRÌNH VI PHÂN DAO ĐỘNG XOẮN CỦA TRỤC MÁY CÓ LẮP ĐẶT HỆ THỐNG GIẢM DAO ĐỘNG DVA
2.1. Phân tích mô hình tính toán dao động xoắn của trục máy có gắn bộ hấp thụ dao động được nghiên cứu trong luận án.
Từ các nghiên cứu trong chương 1, tác giả nhận thấy rằng đã có rất nhiều nghiên cứu về giảm dao động xoắn với thiết bị hấp thụ hay được sử dụng là CPVA (centrifugal pendulum vibration absorber), CDR (centrifugal delay resonant) và DVA (dynamic vibration absorbers). Nhưng các nghiên cứu này chỉ tập trung vào bài toán ổn định và điều khiển chuyển động của hệ có lắp bộ hấp thụ dao động, chưa có nghiên cứu nào sử dụng phương pháp giải tích tính toán tối ưu thông số của bộ hấp thụ dao động cho mô hình hệ chính dao động xoắn.
Đã có một số công trình nghiên cứu giảm dao động xoắn cho trục máy bằng cách lắp bộ hấp thụ DVA với một số dạng khác nhau. Trong các nghiên cứu này, các tác giả cũng đã tập trung nghiên cứu xác định tham số tối ưu cho thiết kế bộ DVA. Tuy nhiên, phương pháp sử dụng trong các nghiên cứu này là các phương pháp số, chẳng hạn phương pháp Taguchi, phương pháp hồi quy phi tuyến Gauss-Newton nên kết quả tối ưu chỉ có thể áp dụng cho các trục máy có số liệu cụ thể, mà không thể áp dụng cho trục máy bất kỳ với các thông số thay đổi [7], [9], [10], [13], [14].
Vì vậy, trong Luận án này tác giả đã đề xuất lắp bộ hấp thụ động lực DVA dạng đĩa - lò xo - cản nhớt vào trục quay để giảm dao động xoắn cho trục như hình 2.1. Thực chất, bộ DVA dạng đĩa - lò xo - cản nhớt là một dạng đặc thù của bộ hấp thụ dao động, nó áp dụng kết quả nghiên cứu từ bộ hấp thụ dao động CPVA [40], [43], [44] là bộ hấp thụ dao động DVA phải được thiết kế đối xứng qua tâm trục máy. Mô hình này khắc phục được các hạn chế của [7], [9], [10], [13], [14] và kế thừa được ưu điểm của thiết kế bộ hấp thụ trong [21], [26], [54] với thiết kế bộ DVA có trọng tâm trùng với đường tâm của trục máy, để không xảy ra hiện tượng lệch tâm và kết cấu đạt được sự ổn định nhất.
Đặc biệt, trong luận án này tác giả tập trung nghiên cứu, tính toán và xác định xác tham số tối ưu của bộ hấp thụ DVA ở dạng giải tích với mục đích giảm chuyển vị góc của hệ chính (góc xoắn của trục) bằng cách sử dụng phương pháp điểm cố định [29], [59], [60], phương pháp cực tiểu mô men bậc hai [60], [67], phương pháp cực đại độ cản tương đương [39], [60] và phương pháp cực tiểu hóa năng lượng [6], [63], [64] của hệ để xác định các tham số tối ưu của bộ DVA như tỷ số cản nhớt và tỷ số giữa tần số riêng của bộ DVA và trục. Từ đó tính toán các kết quả nghiên cứu đạt được để đánh giá hiệu quả giảm dao động xoắn cho trục với các dạng kích động khác nhau, theo các tiêu chuẩn khác nhau.
0
ks
ka
c
s
J
c
a
r
Ja
Hình 2.1. Mô hình trục máy có lắp bộ hấp thụ dao động DVA.
Hình 2.1 biểu diễn sơ đồ của trục máy có lắp bộ hấp thụ dao động DVA dạng đĩa-cản nhớt-lò xo. Trục máy được mô hình hóa gồm một lò xo có độ cứng chống xoắn là ks (Nm), và một đĩa có mô men quán tính khối lượng là Jr [35], [59] (gồm trục và phần rotor lắp cứng với trục thông qua moay ơ); trục máy quay đều với vận tốc góc Ω0 (s-1). Trục chịu tác dụng của cản có hệ số cản là cs
Để giảm dao động xoắn cho trục máy, ta lắp bộ hấp thụ dao động DVA dạng lò xo-giảm chấn-đĩa (mass-spring-dics) vào phần ngõng trục thông qua moay ơ (hub) của bộ hấp thụ dao động DVA. Liên kết giữa trục máy và bộ hấp thụ DVA là liên kết then hoa, do đó rotor của DVA sẽ quay cùng trục.
Sơ đồ cấu tạo của bộ hấp thụ dao động DVA được nghiên cứu trong luận án được biểu diễn trên hình 2.2.
Bộ hấp thụ dao động DVA bao gồm một rotor (lắp với phần ngõng trục thông qua moay ơ) và một đĩa bị động. Rotor và đĩa bị động được liên kết với nhau thông qua n bộ lò xo - giảm chấn (spring-damper). Bán kính quán tính và mô men quán tính khối lượng của rotor và đĩa bị động lần lượt là ρr, Jr, ρa, Ja.
e1
e2
r
M(t)
k
r a
a
c
a
Hình 2.2. Mô hình bộ hấp thụ dao động DVA.
Độ cứng của mỗi lò xo là ka (N/m), hệ số cản nhớt của mỗi giảm chấn là ca (Ns/m). Góc quay của rotor là φr (rad), góc quay tương đối giữa đĩa bị động và rotor là φa (rad)
Góc xoắn θ(t) giữa hai đầu ngõng trục được xác định
(t ) r 0t
(rad) (2.1)
Trục máy chịu tác động của mô men kích động M(t) do hệ thống lắp phía sau trục tác động [35].
2.2. Thiết lập phương trình vi phân dao động.
Mô hình cơ hệ khảo sát trên hình 2.1 có 2 bậc tự do, trong đó:
φr (rad): Góc quay của rotor
φa (rad): Góc quay tương đối giữa đĩa bị động của DVA và rotor Ta có phương trình Lagrange loại II (dạng giải tích) cho cơ hệ ta có:
d T T *
r
r
dt
r r
Q r
(2.2)