d T
T
Q*
Có thể bạn quan tâm!
-

 Một Số Bộ Thông Số Tối Ưu Của Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Một Bậc Tự Do Không Cản Chịu Kích Động Ồn Trắng.
Một Số Bộ Thông Số Tối Ưu Của Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Một Bậc Tự Do Không Cản Chịu Kích Động Ồn Trắng. -
 Tính Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Chính Có Cản Nhớt.
Tính Bộ Hấp Thụ Dao Động Thụ Động Cho Hệ Chính Có Cản Nhớt. -
 Tính Toán Tham Số Tối Ưu Trong Trường Hợp Hệ Chính Có Nhiều Bậc Tự Do
Tính Toán Tham Số Tối Ưu Trong Trường Hợp Hệ Chính Có Nhiều Bậc Tự Do -
 Nghiên Cứu, Phân Tích, Tính Toán Và Xác Định Các Tham Số Tối Ưu Của Bộ Hấp Thụ Dao Động Dva
Nghiên Cứu, Phân Tích, Tính Toán Và Xác Định Các Tham Số Tối Ưu Của Bộ Hấp Thụ Dao Động Dva -
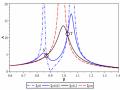 Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1,
Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1, -
 Xác Định Tham Số Tối Ưu Trong Trường Hợp Trục Chịu Kích Động Va Chạm
Xác Định Tham Số Tối Ưu Trong Trường Hợp Trục Chịu Kích Động Va Chạm
Xem toàn bộ 153 trang tài liệu này.
(2.3)
a
dt
a
a
a
a
trong đó:
T: Động năng của cơ hệ
: Thế năng của hệ
: Hàm hao tán của hệ
Q* , : Lực hoạt suy rộng của các lực không thế phát động ứng với tọa độ suy rộng
r
φr.
Q* , : Lực hoạt suy rộng của các lực không thế phát động ứng với tọa độ suy rộng
a
φa.
2.2.1. Biểu thức động năng
Động năng của cơ hệ là:
T Tr
Ta
(2.4)
Trong đó:
Tr là động năng của rotor
Ta là động năng của đĩa bị động
Do rotor quay cùng trục với góc quay r
như sau:
nên động năng của rotor được xác định
T 1 J 2
(2.5)
r 2 r r
2
Động năng của đĩa bị động
T 1 J
a 2 a
ra
(2.6)
Thay (2.5) và (2.6) vào (2.4) ta có động năng của cơ hệ là:
T 1J 21J 2
(2.7)
2 r r 2 a r a
2.2.2. Hàm thế năng của hệ
Thế năng của cơ hệ được tính bằng tổng thế năng trọng lực, thế năng đàn hổi của trục máy và thế năng đàn hồi của các lò xo.
TL s LX
trong đó:
TL : Thế năng trọng lực
s : Thế năng đàn hồi xoắn của trục
LX : Thế năng đàn hồi của các lò xo
Thế năng trọng lực là:
const
(2.8)
(2.9)
Thế năng đàn hồi xoắn của trục máy (do biến dạng góc xoắn giữa hai đầu trục):
1k t 21k 2
(2.10)
s 2 s r 0 2s
trong đó:
ks: Độ cứng xoắn của trục máy
Ω0: Tốc độ quay của trục
θ: Góc xoắn giữa hai đầu trục máy
2
Thế năng đàn hồi của các lò xo bộ hấp thụ DVA là:
n
LX
i1
1
2kai
e1ai
(2.11)
trong đó:
kai: Độ cứng lò xo của bộ hấp thụ dao động
e1: Khoảng cách lắp lò xo của bộ hấp thụ dao động so với tâm trục
n: Số bộ lò xo-giảm chấn.
Thay (2.9), (2.10) và (2.11) vào (2.8), ta có hàm thế năng của cơ hệ được biểu diễn như sau:
2
1
2 n 1 2
kskai e1ai
2
i 1
(2.12)
2.2.3. Hàm hao tán
Năng lượng có hại của trục máy (dao động xoắn) bị tiêu tán bởi các bộ cản nhớt của bộ hấp thụ dao động DVA và của cản môi trường tác dụng lên trục máy:
s a
trong đó:
là hàm hao tán của cơ hệ
(2.13)
a là hàm hao tán của các bộ cản nhớt DVA
s là hàm hao tán của cản môi trường tác dụng lên trục (hệ chính)
Hàm hao tán do các bộ cản nhớt của bộ hấp thụ động lực DVA là:
n
1ce2
(2.14)
2
a ai 2 a
i1
trong đó:
cai: hệ số cản nhớt của bộ hấp thụ dao động
e2: khoảng cách lắp các bộ cản nhớt so với tâm trục máy.
φa: góc quay tương đối của đĩa bị động và rotor của bộ hấp thụ dao động.
Để đơn giản trong thiết kế và thuận tiện trong quá trình lắp ráp, sửa chữa bộ hấp thụ động lực DVA ta nên chọn các bộ cản nhớt có hệ số cản nhớt bằng nhau, nghĩa là:
cai
caj
ca
với i j
Từ đó ta có:
n
1c e
a
21nc e22
(2.15)
2
ai 2 a
i 1
2 a 2 a
Hàm hao tán do cản môi trường tác dụng lên hệ chính là:
1 c 2
(2.16)
s 2 s
Thay (2.15) và (2.16) vào (2.14) ta có hàm hao tán của cơ hệ là:
1c 21nc e22
(2.17)
2 s 2 a 2 a
2.2.4. Lực suy rộng của cơ hệ:
Lực suy rộng của cơ hệ được xác định theo công thức sau:
Q
r
r
Q
a
a
r
a
Q*
r
Q*
a
(2.18)
(2.19)
Do rotor chịu tác dụng của mô men kích động M(t) nên lực hoạt suy rộng của lực không thế phát động là:
Q
* M(t)
r
(2.20)
Q* 0
a
Thay (2.12), (2.17), (2.20) và (2.21) vào các biểu thức (2.18) và (2.19) ta có:
(2.21)
s
Q M (t) k
r
(2.22)
Qnk e2
nc e22
(2.23)
a a 1 a
a 2 a
2.2.5. Phương trình vi phân dao động xoắn của hệ
Thay (2.7), (2.22) và (2.23) vào phương trình (2.2) và (2.3) ta thu được phương trình vi phân mô tả chuyển động của cơ hệ như sau:
(JrJa)rJaacsksr0t M (t)
(2.24)
J J
nk e2
nc e22 0
(2.25)
a r a a
a 1 a
a 2 a
Trong quá trình làm việc phần lớn thời gian hoạt động của trục máy là ở chế độ quay đều. Vì vậy, ta xét trường hợp trục máy quay đều với tốc độ quay Ω0 là hằng số.
Từ phương trình góc xoắn (2.1), đạo hàm cấp hai theo thời gian ta thu được
r
(2.26)
Mặt khác mô men quán tính khối lượng của rotor và đĩa bị động được xác định theo công thức:
2
J r mr r
(2.27)
J m 2
(2.28)
a a a
trong đó:
mr : khối lượng rotor (trục máy), kg
ma : khối lượng đĩa bị động của bộ hấp thụ DVA, kg ρr : bán kính quán tính của rotor (trục máy), m
ρa : bán kính quán tính đĩa bị động của bộ hấp thụ DVA, m
Thay các công thức (2.26), (2.27) và (2.28) vào (2.24), (2.25) ta thu được hệ
phương trình vi phân chuyển động mô tả dao động xoắn (t)
của cơ hệ như sau:
(m 2m 2)m 2c k M(t)
(2.29)
r r a a a a a s s
m 2m 2nk e2nc e2 0
(2.30)
a a a a a a 1 a a 2 a
Biểu diễn các phương trình (2.29) và (2.30) dưới dạng ma trận ta thu được:
Mq
CqKq F
(2.31)
Trong đó véc tơ tọa độ suy rộng là:
q
a
(2.32)
và ma trận khối lượng, ma trận cản nhớt, ma trận độ cứng và véc tơ của lực kích động được biểu diễn như sau:
m 2 m 2 m 2
M
r r a a a a
(2.33)
m 2 m 2
a a a a
C cs 0
0 nc e2
(2.34)
a 2
K ks 0
0 nk e2
(2.35)
a 1
M (t)
F m 2
r r
0
(2.36)
Trường hợp bỏ qua cản của môi trường tác dụng lên hệ chính (cs=0), phương trình vi phân mô tả dao động của hệ được viết lại như sau:
(m 2m 2)m 2k M(t)
(2.37)
r r a a a a a s
m 2m 2nk e2nc e2 0
(2.38)
a a a a a a 1 a a 2 a
2.3. Mô phỏng số dao động xoắn của trục máy có lắp bộ hấp thụ DVA.
Trong mục này tác giả thực hiện mô phỏng số dao động xoắn của trục máy không cản có lắp bộ hấp thụ DVA với thông số bất kỳ (khi chưa tính toán xác định các tham số tối ưu). Để thực hiện mô phỏng số tác giả sử dụng số liệu mô phỏng trong công bố
[35] của GS Hosek (Hình 1.2). Số liệu mô phỏng như sau: Trục máy có độ cứng xoắn ks=k1=1.125.105 kgm2/s2
Mô men quán tính khối lượng của trục máy là Jr=I1=1.125.10-1 kgm2
Trục máy có bán kính quán tính ρr=0.15 m
Các thông số của bộ hấp thụ DVA được chọn bất kỳ như sau:
- Số lò xo-cản nhớt sử dụng: n = 4
- Bán kính quán tính của đĩa DVA: ρa = 0.15 m
- Khoảng cách lắp ráp lò xo: e1 = 0.075 m
- Khoảng cách lắp cản nhớt: e2 = 0.12 m
- Khối lượng đĩa DVA: ma = 0.2 kg
- Mô men quán tính khối lượng: Ja = 4.5.10-3 kgm2
- Mỗi lò xo có độ cứng ka = 1.812 x 105 Nm-1
- Mỗi bộ cản nhớt có hệ số cản nhớt ca = 14.658 Nsm-1
Mô phỏng số kích động tuần hoàn
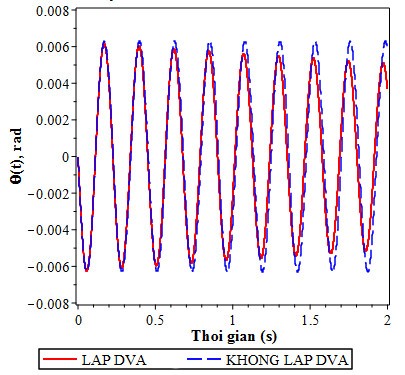
Với số liệu mô phỏng được chọn bất kỳ như ở trên, cơ hệ gồm trục máy chịu xoắn có lắp bộ hấp thụ DVA sẽ xảy ra cộng hưởng tại các tần số lần lượt là 49.997 s-1, 980.58 s-1 và 1000.05 s-1. Trong phần này, tác giả thực hiện mô phỏng tại tần số cộng hưởng của hệ là 49.997 s-1. Đáp ứng dao động xoắn của trục máy trong mô phỏng này được thể hiện trên hình 2.3.
Hình 2.3. Dao động xoắn của trục khi hệ chịu kích động điều hòa
Mô phỏng số kích động va chạm
Hình 2.4. Dao động xoắn của trục khi hệ chịu kích va chạm
Mô phỏng số kích động ngẫu nhiên
Xét hệ chịu kích động ngẫu nhiên được biểu diễn dưới dạng hàm Gaussian Noise như sau:
2
b
![]()
1 (t a )2
M (t)
1 2e 2 b2
trong đó a là giá trị trung bình; b là độ lệch chuẩn.
Chọn giá trị trung bình a = 10 và độ lệch chuẩn b = 1 để mô phỏng số. Đáp ứng dao động xoắn của trục khi chịu kích động ngẫu nhiên được biểu diễn trong hình 2.5.
Hình 2.5. Dao động xoắn của trục khi hệ chịu kích động ngẫu nhiên
Nhận xét:
Từ hình 2.3 ta thấy rằng với trường hợp hệ chịu kích động điều hòa làm việc trong miền tần số cộng hưởng, việc lắp bộ hấp thụ động lực DVA không những không mang lại hiệu quả giảm dao động mà biên độ dao động lại tăng so với trường hợp khi chưa lắp DVA. Đáp ứng dao động xoắn của trục với kích động va chạm được mô tả trên hình 2.4. Từ hình 2.4, ta thấy rằng trong trường hợp có lắp bộ hấp thụ động lực DVA dao động xoắn của trục có xu hướng giảm, tuy nhiên biên độ dao động xoắn giảm không