chuyển sang chế độ bình ổn với biên độ khoảng 0.04 rad với trường hợp hệ chính không cản (hình 4.4a). Trường hợp hệ chính có cản nhỏ (cs = 5 kgm2/s) biên độ dao động xoắn bình ổn là 0.004 rad (hình 4.4b). Trường hợp hệ chính có cản khá lớn (cs = 22.5 kgm2/s) biên độ dao động xoắn bình ổn là 0.001 rad (hình 4.4c).
Từ bảng 4.5 ta thấy rằng trong trường hợp hệ chính không cản, hiệu quả giảm dao động là rất tốt (99.987%). Điều này được thể hiện rõ hơn với đồ thị mô tả hàm năng lượng E truyền từ hệ chính sang DVA (hình 4.5) rất lớn so với trường hợp hệ chính có cản (hình 4.9, 4.11, 4.13 và 4.15). Trong trường hợp hệ chính không cản năng lượng dao động từ hệ chính truyền sang DVA lớn hơn nhiều trong trường hợp hệ chính có cản, vì khi ấy một phần năng lượng dao động bị cản mô trường cs tác dụng lên hệ chính hấp thụ. Khi hệ chính chịu cản môi trường có hệ số cản, hiệu quả giảm dao động của bộ DVA-FPM là 68.178%. Ta thấy rằng phần lớn đồ thị năng lượng E đều nằm trên trục hoành (dương) nên năng lượng dao động được truyền từ hệ chính sang bộ hấp thụ DVA (hình 4.5 và 4.6).
Từ các tính toán và mô phỏng trong trường hợp hệ chính chịu tác động của kích động điều hòa với tần số kích động nằm ngoài vùng cộng hưởng và nằm trong vùng cộng hưởng, ta thấy đáp ứng của các thiết kế DVA-FPM đều rất tốt. Hiệu quả giảm dao động còn được thể hiện thông qua việc xét đến hoặc không xét đến cản của hệ chính. Trong chương 3 tác giả đã nghiên cứu xác định tham số tối ưu của bộ hấp thụ dao động DVA theo bốn phương pháp giải tích khác nhau trong trường hợp hệ chính không cản. Tuy nhiên với các kết quả mô phỏng số ở trên cho thấy đáp ứng rất tốt của các kết quả tối ưu xác định được với trường hợp hệ chính có cản.
4.1.2. Mô phỏng số trường hợp trục máy chịu tác dụng của kích động va chạm.
Trong quá trình làm việc của máy nhiều khi xảy ra hiện tượng các bánh răng lắp trên va chạm nhau trong quá trình ăn khớp, hoặc xảy ra quá tải cục bộ với hệ thống. Vì vậy ta cần xem xét hiệu quả giảm dao động của các thiết kế DVA tối ưu thu được ở chương 3 khi hệ thống xảy ra va chạm. Khi hệ chính chịu tác động của kích động va chạm thiết kế DVA-MKE (được xác định theo phương pháp cực tiểu hóa năng lượng) là phù hợp nhất.
Hệ chịu kích động va chạm tương đương với hệ có vận tốc góc ban đầu khác không. Trong mục này tác giả thực hiện mô phỏng với trạng thái ban đầu:
T
y0 0 0 2 0
Các đáp ứng của hệ với kích động va chạm khi lắp và không lắp DVA-MKE trong các trường hợp hệ chính có cản (cs=22.5 kgms-2) và không cản (cs=0 kgms-2) được thể hiện trong các hình 4.7 đến hình 4.10
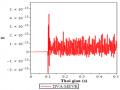
Hình 4.7. Đáp ứng giảm dao động của DVA-MKE khi hệ chính không cản chịu kích động va chạm
Hình 4.8. Năng lượng E khi lắp DVA-MKE với hệ chính không cản chịu kích động va chạm
b) Hệ chính có cản cs = 5 kgms-2
b) Hệ chính có cản cs = 22.5 kgms-2
Hình 4.9. Đáp ứng giảm dao động của DVA-MKE khi hệ chính có cản chịu kích động va chạm
Hình 4.10. Năng lượng E khi lắp DVA-MKE với hệ chính có cản chịu kích động va chạm
Hiệu quả giảm dao động tính theo công thức (4.2) cho thiết kế DVA-FPM tối ưu khi hệ chịu kích động va chạm được thống kê trong bảng 4.5.
Bảng 4.5. Hiệu quả giảm dao động của các thiết kế DVA khi hệ chính chịu kích động va chạm
Hiệu quả giảm dao động (%) | |||
cs = 0 kgms-2 | cs = 5 kgms-2 | cs = 22.5 kgms-2 | |
DVA-MKE | 99.473 | 95.461 | 81.674 |
Có thể bạn quan tâm!
-
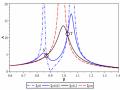
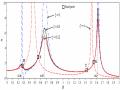
 Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1,
Đồ Thị Hàm Khuếch Đại Biên Độ - Tần Số Với Α=0.9, Μ=0.04, Η=1, -
 Xác Định Tham Số Tối Ưu Trong Trường Hợp Trục Chịu Kích Động Va Chạm
Xác Định Tham Số Tối Ưu Trong Trường Hợp Trục Chịu Kích Động Va Chạm -
 Tính Toán, Mô Phỏng Số Hiệu Quả Giảm Dao Động Xoắn Cho Trục Máy
Tính Toán, Mô Phỏng Số Hiệu Quả Giảm Dao Động Xoắn Cho Trục Máy -
 Năng Lượng E Với Dva-Mevr Khi Hệ Chính Không Cản Chịu Kích Động Ngẫu Nhiên
Năng Lượng E Với Dva-Mevr Khi Hệ Chính Không Cản Chịu Kích Động Ngẫu Nhiên -
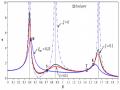
 Sự Thay Đổi Của Đường Cong Khuếch Đại Biên Độ Khi Thay Đổi Tỷ Số Cản Với
Sự Thay Đổi Của Đường Cong Khuếch Đại Biên Độ Khi Thay Đổi Tỷ Số Cản Với -
 Tham Số Tối Ưu Ξ Theo Số Bậc Tự Do Của Hệ Chính
Tham Số Tối Ưu Ξ Theo Số Bậc Tự Do Của Hệ Chính
Xem toàn bộ 153 trang tài liệu này.
Từ các kết quả mô phỏng số trên các hình 4.7 đến hình 4.10 và dữ liệu bảng 4.5 ta thấy rằng hiệu quả giảm dao động của thiết kế DVA-MKE trong trường hợp hệ chịu kích động va chạm là rất tốt. Trong trường hợp hệ chính có cản hiệu quả giảm dao động là 81.675% và trong trường hợp hệ chính không cản thì hiệu quả giảm dao động cao hơn là 99.473%. Điều này phù hợp với đồ thị năng lượng E (hình 4.8) trong trường hợp hệ chính không cản lớn hơn năng lượng E trong trường hợp hệ chính có cản (hình 4.10), nghĩa là trong trường hợp hệ chính không cản DVA-MKE hấp thụ năng lượng dao động từ hệ chính tốt hơn khi hệ chính có cản.
4.1.3. Mô phỏng số trường hợp hệ chịu tác dụng của kích động ngẫu nhiên
Với trường hợp hệ chính chịu kích động ngẫu nhiên, như đã phân tích trong chương 3, ta có thể sử dụng bộ hấp thụ động lực DVA với thiết kế DVA-MQT (được xác định theo phương pháp cực tiểu mô men bậc hai) hoặc thiết kế DVA-MEVR (được xác định theo phương pháp cực đại độ cản tương đương).
Xét hệ chịu kích động ngẫu nhiên. Trong mục này tác giả thực hiện mô phỏng với kích động ngẫu nhiên được biểu diễn dưới dạng hàm Gaussian Noise như sau:
2
b
![]()
1 (t a )2
M (t)
1 2e 2 b2
trong đó a là giá trị trung bình; b là độ lệch chuẩn.
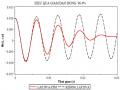
Chọn giá trị trung bình a = 10 và độ lệch chuẩn b = 1 để tính toán và mô phỏng số. Các đáp ứng của hệ khi lắp và không lắp DVA với các thiết kế tối ưu khác nhau (DVA-MQT và DVA-MEVR) trong các trường hợp hệ chính có cản (cs=22.5 kgms-2) và không cản (cs=0 kgms-2) được thể hiện trong các hình 4.11 và hình 4.16. Hiệu quả giảm dao động theo từng thiết kế khi hệ chịu kích động ngẫu nhiên được liệt kê trong bảng 4.6.
Hình 4.11. Đáp ứng giảm dao động của DVA-MQT khi hệ chính không cản chịu kích động ngẫu nhiên
a) Hệ chính có cản cs = 5 kgms-2
b) Hệ chính có cản cs = 22.5 kgms-2
Hình 4.12. Đáp ứng giảm dao động của DVA-MQT khi hệ chính có cản chịu kích động ngẫu nhiên
Hình 4.13. Đáp ứng giảm dao động của DVA-MEVR khi hệ chính không cản chịu kích động ngẫu nhiên
a) Hệ chính có cản cs = 5 kgms-2
b) Hệ chính có cản cs = 22.5 kgms-2
Hình 4.14. Đáp ứng giảm dao động của DVA-MEVR khi hệ chính có cản chịu kích động ngẫu nhiên
Hình 4.15. Năng lượng E với DVA-MQT khi hệ chính không cản chịu kích động ngẫu nhiên