Hình 2.4: Hệ tĩnh định tương đương
Với mỗi phản lực liên kết Xi ta có một điều kiện chuyển vị: chuyển vị i của hệ theo phương của phản lực liên kết Xi : i 0 (2.1)
Nếu hệ siêu tĩnh có n bậc siêu tĩnh thì sẽ có n phương trình (2.1). Gọi là hệ phương trình chính tắc xác định các phản lực liên kết Xi (i = 1, 2, .., n):
1 11 1 12 2 1n n 1p
X X ... X 0
X X ... X 0
2 21 1 22 2 2 n n 2p
.............................................................
Có thể bạn quan tâm!
-
 Sức bền vật liệu - 2
Sức bền vật liệu - 2 -
 Thanh Mặt Cắt Ngang Tròn Chịu Uốn Đồng Thời Xoắn
Thanh Mặt Cắt Ngang Tròn Chịu Uốn Đồng Thời Xoắn -
 Trục Chịu Uốn Và Xoắn Đồng Thời Các Biểu Đồ Nội Lực Được Biểu Diễn Trên Các Hình 1.22B, C, D. Thay Số Vào Ta Được:
Trục Chịu Uốn Và Xoắn Đồng Thời Các Biểu Đồ Nội Lực Được Biểu Diễn Trên Các Hình 1.22B, C, D. Thay Số Vào Ta Được: -
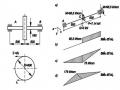
 Diện Tích Và Hoành Độ Trọng Tâm Của Một Số Hình Phẳng
Diện Tích Và Hoành Độ Trọng Tâm Của Một Số Hình Phẳng -
 Khái Niệm, Phương Trình Vi Phân Của Đường Đàn Hồi
Khái Niệm, Phương Trình Vi Phân Của Đường Đàn Hồi -
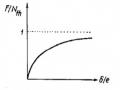 Quan Hệ Độ Vòng - Lực Nén (Dạng Không Thứ Nguyên)
Quan Hệ Độ Vòng - Lực Nén (Dạng Không Thứ Nguyên)
Xem toàn bộ 91 trang tài liệu này.
(2.2)
X X ... X 0
n n1 1 n2 2 nn n np
trong đó: ip là chuyển vị theo phương i của hệ cơ bản do tải trọng gây nên. ik là chuyển vị đơn vị theo phương i của hệ cơ bản do lực đơn vị đặt theo phương k gây nên. i là chuyển vị theo phương của lực Xi do tải trọng và phản lực liên kết.
Ta có thể biểu diễn hệ phương trình (2.2) dưới dạng ma trận. Giải hệ (2.2) bằng phương pháp Gauss, Cramer, … hoặc giải qua các chương trình máy tính như MATLAB, MAPLE, …
Ta có thể tính được ip và ik theo công thức Mo sau:
n
li M M
i k dz
;
li M M
EJ
i p dz
(2.3)
EJ
ik
i1 0
ip
n
i1 0
Sau khi xác định được các phản lực liên kết Xi, đặt các phản lực liên kết Xi cùng với tải trọng lên hệ cơ bản ta được một hệ tĩnh định tương đương.
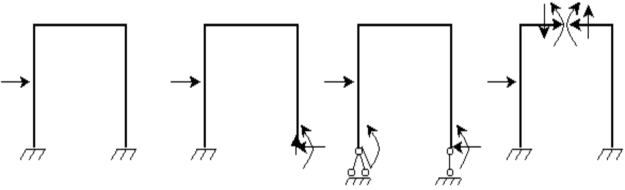
Giải hệ siêu tĩnh bằng phương pháp lực ta có các bước sau:
Bước 1. Xác định bậc siêu tĩnh và chọn hệ cơ bản
Bước 2. Xác định hệ tĩnh định tương đương bằng cách đặt vào hệ cơ bản các phản lực liên kết tương ứng với các liên kết thừa đã bỏ đi.
Bước 3. Thiết lập hệ phương trình chính tắc
2.2.3. Tính hệ siêu tĩnh đối xứng
a. Định nghĩa
Hệ đối xứng là hệ có ít nhất một trục đối xứng.
Hệ đối xứng chịu tải trọng đối xứng khi tải trọng đặt lên phần này là ảnh của tải trọng đặt lên phần kia qua gương phẳng đặt tại trục đối xứng và vuông góc với mặt phẳng của hệ.
Nếu tải trọng của phần này là ảnh của phần kia nhưng có chiều ngược lại thì ta gọi là hệ đối xứng chịu tải trọng phản đối xứng.
Hình (2.5a,b,c) : Hệ siêu tĩnh đối xứng, hệ chịu tải trọng đối xứng, hệ chịu tải trọng phản đối xứng.
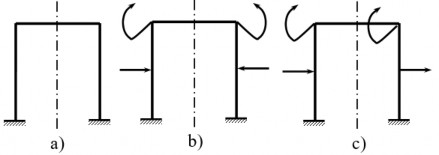
Hình 2.5 : Hệ siêu tĩnh đối xứng
b. Tính chất
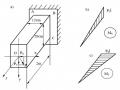
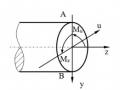
Tương tự, nội lực cũng có tính chất đối xứng hoặc phản đối xứng. Trong mặt phẳng: Nz , Mx có tính đối xứng, Qy có tính phản đối xứng Trong không gian: Nz, Mx, My là đối xứng, Qx, Qy và Mz phản đối xứng.
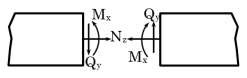
Hình 2.6: Nội lực trong mặt phẳng
Tính chất của hệ siêu tĩnh đối xứng:
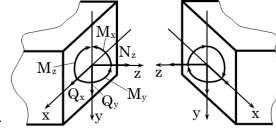
Hình 2.7: Nội lực trong không gian
Nếu một hệ siêu tĩnh đối xứng chịu tải trọng đối xứng thì nội lực phản đối xứng trên mặt cắt trong mặt phẳng đối xứng của hệ là bằng không. Ngược lại nếu tải trọng là phản đối xứng thì nội lực đối xứng phải bằng không.
Chú ý các nhận xét sau: Khi hệ là đối xứng chịu tải trọng đối xứng thì biểu đồ mômen là đối xứng, ngược lại nếu tải trọng phản đối xứng thì biểu đồ mômen là phản đối xứng.
Chứng minh: Giả sử có hệ siêu tĩnh đối xứng chịu tải phản đối xứng (hình 2.8b). Chọn hệ cơ bản bằng cách cắt đôi khung. Phải chứng minh các thành phần nội lực đối xứng X1 và X2 trên mặt cắt là bằng không.
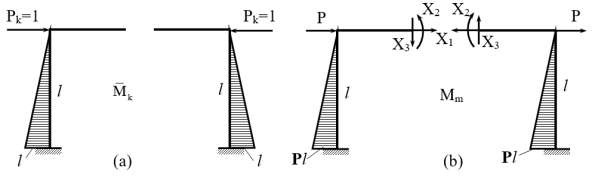
Hình 2.8 : Hệ siêu tĩnh đối xứng và phản xứng X1 , X2 , X3 là nghiệm của phương trình chính tắc:
X X X 0
11 1 12 2 13 3 1p
21X1 22X2 23X3 2p 0
(2.4)
X X X 0
31 1 32 2 33 3 3p
Biểu đồ
M1 ,
M2 là đối xứng còn biểu đồ
M3 là phản đối xứng nên:
13 = 31 = 23 = 32 =1p = 2p = 0
Do đó hệ phương trình chính tắc trên thu gọn lại như sau:
X X 0
11 1 12 2
21X1 22X2 0
(2.5)
X 0
33 3 3p
Hai phương trình đầu là một hệ thống phương trình thuần nhất 2 ẩn số định thức khác không, do đó X1 = X2 = 0.
Tương tự, khung chịu lực đối xứng như hình vẽ 2.8a. Lúc đó biểu đồ tải trọng là đối
xứng nên:
13 = 31 = 23 = 32 = 3P = 0
Hình 2.9: Giải bài toán khung bằng cách sử dụng hệ siêu tĩnh đối xứng và phản xứng
Hệ phương trình chính tắc:
11X1 12 X2 1p 0
X X 0
21 1 22 2 2p
(2.6)
33X3 0
Từ phương trình thứ 3 ta được X3 = 0 .
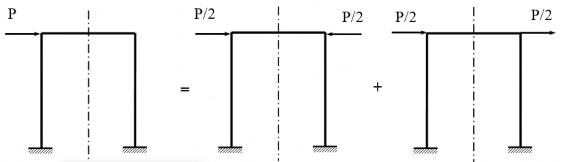
Trường hợp hệ đối xứng nhưng tải trọng bất kỳ thì bằng tổng tác dụng của hệ có tải trọng đối xứng và hệ chịu tải trọng phản đối xứng (hình 2.9)
2.3. DẦM LIÊN TỤC
2.3.1. Định nghĩa
Dầm liên tục là dầm siêu tĩnh đặt trên nhiều gối tựa đơn, trong đó có một gối tựa cố định (hình 2.10a). Khoảng cách giữa hai gối tựa gọi là nhịp. Bậc siêu tĩnh của dầm bằng số nhịp trừ đi một.
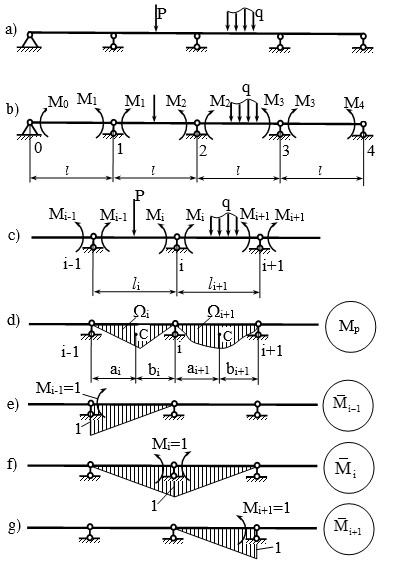
Hình 2.10: Dầm liên tục
2.3.2. Phương trình ba mômen
Chọn hệ cơ bản của dầm bằng cách đặt lên mỗi gối tựa một khớp để chia dầm thành nhiều dầm đơn (h×nh 2.10b).
Những lực tác dụng lên một nhịp nào đó chỉ ảnh hưởng đến chuyển vị của nhịp bên cạnh nên khi xét chuyển vị ở một gối tựa bất kỳ, chỉ cần xét hai nhịp liên tiếp nhau
và các ẩn số chỉ là các mômen uốn nội lực Mi (h×nh 2.10c) (Mi>0 làm căng thớ dưới).
Phương trình chính tắc: viết theo điều kiện góc xoay tương đối giữa hai mặt cắt tại gối tựa đó phải bằng không.
Ví dụ tại gối tựa thứ “i”:
11M1 + 12M2 +…+ i,i-1Mi-1 + i,iMi + i,i+1Mi+1 +…+ 1nMn + ip = 0
Các hệ số i1 = i2 = …= i(i-2) = … = 0, do lực tác dụng trên hai nhịp ở trên hai gối tựa thứ “i” chỉ ảnh hưởng đến góc xoay của gối tựa trên hai nhịp đó. Phương trình chính tắc của hệ có dạng sau:
i,i-1Mi-1 + i,iMi + i,i+1Mi+1 + ip = 0 (2.7) Các hệ số và số hạng tự do trong (2.7):
li1 M M 1 1 1 l
i,i1
i1 idz
. .1.li.
i
0 EJi
EJi
2 3 6EJi
li M M 1 1 2 1 1 2 l l
i,i i idz
. .1.li.
. .1.li1.
ii1
0 EJ EJi
2 3 EJi1
2 3 3EJi
3EJi1
li1 M M 1 1 1 l
i,i1
i i1dz
. .1.li1.
i1
0 EJi1
EJi1
2 3 6EJi1
li MpMi
ip
dz
1 . .ai
1 bi1
. .
i1
i
0 EJ EJi
li EJi1
li1
trong đó: li, li+1 : độ dài của nhịp thứ i và thứ (i+1). i, i+1: Diện tích của biểu đồ mômen do tải trọng gây nên trên hai nhịp thứ i và thứ (i+1). ai, bi+1: Khoảng cách từ trọng tâm của các diện tích đó đến gối tựa thứ (i-1) và (i+1).
Thay các trị số đó vào phương trình chính tắc, ta có:
li M
li
li1
M
li1 M
i .ai i1.bi1 0
(2.8)
6EJi
i1
3EJi
3EJi1 i
6EJi1
i1
liEJi
li1EJi1
NÒu ®é cøng EJ kh«ng ®æi trªn suèt chiÒu dµi cđa dÇm, ta cã :
l M 2l l M l M
6i.ai i1.bi1 0
(2.9)
i i1 i i1 i i1 i1
li li1
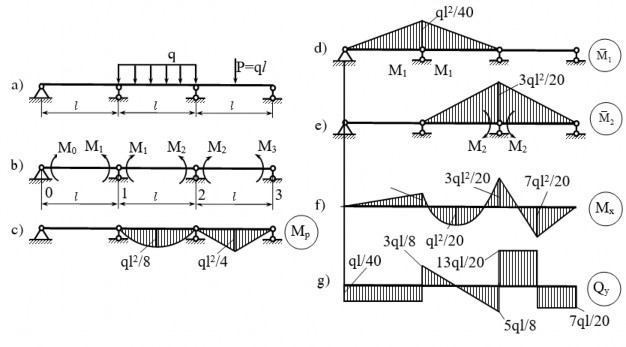
Ví dụ 2.1 :
Vẽ biểu đồ lực cắt, mômen uốn của dầm liên tục như hình vẽ 2.11a
Giải:
Đây là hệ siêu tĩnh bậc 2. Hệ cơ bản như hình 2.11b. Biểu đồ mômen uốn Mp như hình 2.11c.
Phương trình ba mômen đối với gối tựa thứ 1, 2 và 3 là:
Hình 2.11 : Hình ví dụ 2.1
lM0 2(l + l)M1 lM2 6 0
2 ql2
. .l.
1
0
3 8 2
2 ql2 11 ql2 1
lM 2(l + l)M lM 6 . .l. . .l. 0
1 2 3
3 8 2 2 4 2
Trong đó M0 = M3 = 0 (do các khớp không có mômen ngoại lực tập trung). Giải ra
2
ta được: M ql
1 40
; M 3ql
2
2 20
Dấu (-) chỉ các m«men có chiều ngược với chiều đã chọn.
Cộng các biểu đồ Mp, M1, M2 ta được biểu đồ Mx (hình 2.11f). Sau khi tính phản lực các gối tựa của biểu đồ Mp, M1, M2 và cộng các vectơ phản lực, ta thu được biểu đồ Qy như trên hình 2.11g.
2.3.3. Trường hợp đặc biệt
Trường hợp dầm liên tục có đầu thừa và đầu ngàm thì cách giải của chúng ta như sau:
Tưởng tượng bỏ đầu thừa và thu gọn tất cả ngoại lực đặt trên đoạn đó về gối tựa cuối cùng. Mômen uốn thu gọn có thể xem là mômen liên kết tại mặt cắt của gối tựa cuối cùng (mômen đó có trị số dương khi nó làm căng thớ dưới và có trị số âm khi nó làm căng thớ trên) hoặc được xem là mômen uốn ngoại lực tác động lên dầm. Còn liên kết ngàm thì được thay bằng một nhịp đặt trên một gối tựa cố định và một liên kết đơn. Ðộ cứng EJx của đoạn nhịp này được xem là lớn vô cùng và chiều dài của nhịp đó được xem là bằng không (hình 2.12).
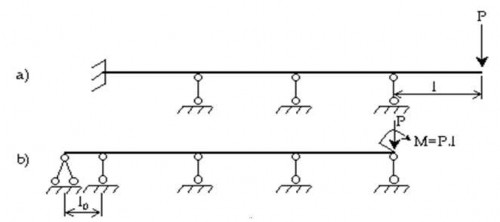
Hình 2.12 : Dầm liên tục có đàu thừa và đầu ngàm
Phương trình ba mômen được áp dụng đối với từng nhịp cạnh như phần trên.
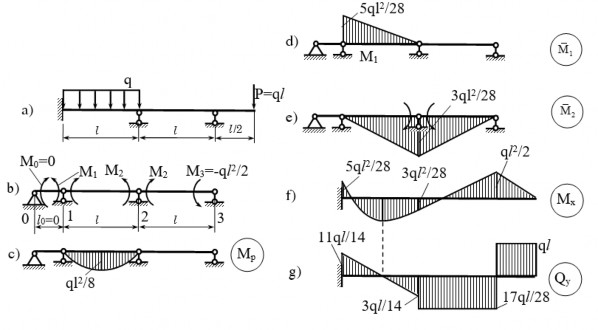
Ví dụ 2.2:
Vẽ biểu đồ nội lực của dầm chịu lực như hình vẽ (2.13a).
Hình 2.13 : Hình ví dụ 2.2
Giải:
Hệ cơ bản và thứ tự các nhịp, các gối tựa được đánh số như hình 2.13b. Biểu đồ Mp do tải trọng gây nên trên hệ cơ bản như hình 2.13c.
Mômen thu gọn ở gối tựa cuối cùng được xem là mômen liên kết trên mặt cắt của
gối tựa đó. Vì vậy trên biểu đồ mômen Mp không có mômen đó. Với các gối tựa (1), (2), ta thiết lập được các phương trình ba mômen như sau:
2 ql21
lM0 2(l + l)M1 lM2 6 . .l. 0
3 8 2
2 ql21
lM1 2(l + l)M2 lM3 6 . .l. 0
3 8 2
Giải hệ trên với M0 = 0 và M3 = 0.5Pl = 0.5ql2 ta được:
;
5ql2
M1
28
M2
3ql2 28
Mômen M1<0, chứng tỏ mômen M1 làm căng thớ trên, mômen M2>0 có nghĩa là M2 làm căng thớ dưới. Biểu đồ mômen uốn và lực cắt cho trên hình 2.13f,g.
2.4. PHÉP NHÂN BIỂU ĐỒ VÊRÊXAGHIN
Xác định chuyển vị của các thanh có độ cứng không đổi, theo công thức Mo khá phức tạp. Đối với hệ thanh thẳng, ta thấy ít nhất một hàm nội lực dưới dấu tích phân là bậc nhất hoặc hằng số.
Nếu một trong hai hàm số dưới dấu tích phân có dạng bậc nhất thì ta có thể thay cách giải tích phân trên bằng phương pháp nhân biểu đồ của Vêrêxaghin.
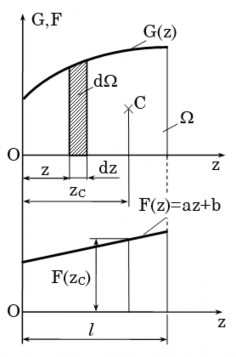
Hình 2.14: Phép nhân biểu đồ Vêrêxaghin
Nội dung phương pháp như sau:
Giả thiết trên đoạn chiều dài l nào đó của thanh, hàm số G(z) có dạng bất kỳ còn F(z) có dạng bậc nhất: F(z) = (az + b)
Tích phân
Mk Mmdz F(z).G(z)dz , trong đó
EJ
F(z) Mk
còn
G(z) Mm .
EJ
Tích phân I của hai hàm số F(z) và G(z):
l l
I F(z).G(z)dz (az b).G(z)dz
0 0
với d = G(z)dz là một diện tích vô cùng nhỏ của biểu đồ G(z), ta có tích phân theo biến mới: I (az b)dazdbdazdb