4.2 Thiết kế và tổ chức phần cứng thực nghiệm
4.2.1 Lựa chọn các loại cảm biến
1. Lựa chọn cảm biến đo từ trường ba trục [26]
Theo giới thiệu tại điểm 3 mục 2.2.2 (một số loại cảm biến từ trường công nghệ mới). Lựa chọn cảm biến từ trường Trái đất vào mục đích thử nghiệm định hướng vào loại HMC2003. Ngoài những thông tin cơ bản đã nêu, các đặc tính kỹ thuật chi tiết của loại cảm biến này có thể tham khảo ở [17, 21].
2. Lựa chọn cảm biến vận tốc góc bổ sung [27]
Để đo được các thành phần VTG của TBB theo VTT, ở chương 2 đã chỉ ra rằng phải sử dụng thêm ít nhất một cảm biến VTG độc lập. Cảm biến VTG một trục dưới dạng con quay vi cơ (MEMS) đáp ứng hoàn toàn những yêu cầu về kích thước, trọng lượng và giá thành, bảo đảm độ chính xác mức độ cho phép. Con quay vi cơ là sự kết hợp của một thiết bị chuyển động theo gia tốc được tích hợp trong một cấu trúc cơ khí siêu nhỏ. Nó bao gồm một phần tử cảm biến chuyển động được đặt trong rãnh trượt, có khả năng dịch chuyển tỉ lệ với góc quay dựa theo nguyên tắc Coriolis. Ở đây ta chọn con quay vi cơ LY510ALH của Hãng STMicroelectronic. USA (Hình 4.1).
a) Tính năng và đặc tính kỹ thuật của LY510ALH:
+ Làm việc bằng nguồn đơn trong dải: (2.7 3.6) V;
+ Dải nhiệt độ làm việc cho phép: (-40 85)°C;
Có thể bạn quan tâm!
-
 Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb
Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb -
 Mô Phỏng Đánh Giá Các Mô Hình Hệ Thống Xác Định Vtg Đã Xây Dựng
Mô Phỏng Đánh Giá Các Mô Hình Hệ Thống Xác Định Vtg Đã Xây Dựng -
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 13
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 13 -
 Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm
Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm -
 Cấu Trúc Các Kênh Điều Khiển Định Hướng Tbb Và Phương Pháp Phối Ghép Với Các Bộ Đo Góc Và Vtg
Cấu Trúc Các Kênh Điều Khiển Định Hướng Tbb Và Phương Pháp Phối Ghép Với Các Bộ Đo Góc Và Vtg -
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 17
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 17
Xem toàn bộ 151 trang tài liệu này.
+ Độ ổn định nhiệt độ cao;
+ Tín hiệu đầu ra dạng analog tuyệt đối;
+ Tích hợp bộ lọc thông thấp;
+ Điện năng tiêu thụ thấp;
+ Chịu được rung xóc cao;
+ Thân thiện với môi trường
Hình 4.1 Cảm biến LY510ALH
b) Phạm vi ứng dụng: Hệ thống dẫn đường GPS; Phát hiện chuyển động;
Thiết bị cầm tay, điều khiển từ xa, điều khiển trò chơi; Điều khiển chuyển động với giao diện người dùng; Công nghệ robot.
c) Mô tả. Con quay vi cơ một trục LY510ALH do hãng ST Microelectronic sản xuất. Tiêu thụ điện năng cực thấp, dùng để đo VTG quay dọc theo trục, độ ổn định làm việc theo nhiệt độ cao trong dải rộng. Dải đo của LY510ALH là ±100 °/s và có khả năng phân biệt trong dải ở mức -3dB tần số làm việc tới 140 Hz.
Sơ đồ chức năng của LY510ALH được trình bày trên hình 4.2.
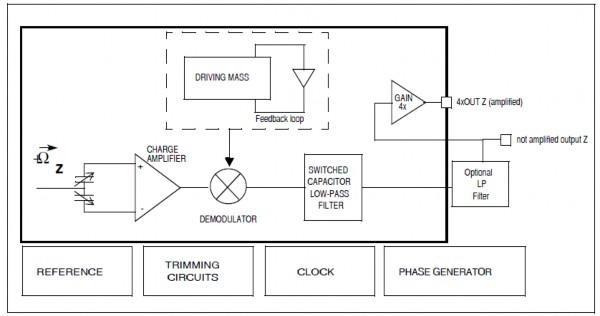
Hình 4.2 Sơ đồ chức năng LY510ALH
Sơ đồ nguyên lý sử dụng LY510ALH và giá trị của các linh kiện mở rộng được thể hiện trên hình 4.3. Qua đó ta thấy LY510ALH cho phép có nhiều lựa chọn kết nối: có khuếch đại; không khuếch đại; hoặc sử dụng thêm bộ lọc đầu ra, các giá trị linh kiện của bộ lọc mở rộng được chỉ rõ.
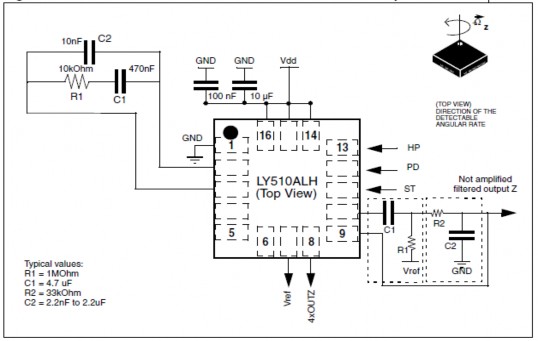
Hình 4.3 Sơ đồ nguyên lý LY510ALH có bộ lọc mở rộng
d) Các đặc tính kỹ thuật chi tiết của loại cảm biến này tham khảo ở [27].
4.2.2 Thiết kế Board Sensores
1. Xây dựng sơ đồ chức năng, hình 4.4
Board Sensoes (BS) xây dựng trên cơ sở lai ghép hai mini-board là board HMC2003 và board LY510ALH có những thành phần chức năng sau:
a) Miniboard HMC2003, gồm có:
+ Mạch tạo nguồn nuôi ổn áp;
+ Mạch tạo dao động 500Hz; khuếch đại cặp pha dao động 500Hz;
+ Bộ đệm đầu vào cảm biến;
+ Cảm biến HMC2003;
+ Mạch lọc và khuếch đại đầu ra ba kênh X, Y và Z.
b) Miniboard LY510ALH, gồm có:
+ Mạch tạo nguồn nuôi ổn áp và lọc nguồn;
+ Bộ lọc thông thấp đầu vào;
+ Bộ lọc thông cao đầu ra không khuếch đại.
2. Thiết kế sơ đồ nguyên lý, hình 4.5.
a) Miniboard HMC2003
b) Miniboard LY510ALH
91
91
Miniboard | Hình 4.4. Sơ đồ chức |
HMC2003 | năng Board Sensores |
Nguồn ổn áp | |
15VDC | |
Mạch tạo F | |
F=500Hz | |
Miniboard LY510ALH Nguồn ổn áp 3.6VDC Bộ lọc LF đầu vào Sensor LY510ALH Bộ lọc HPF Đầu ra 1Y Jack I/O (tới ADC) | |
KĐ cặp pha | |
F0 và F180 | |
Bộ đệm đầu | |
vào 3 kênh | |
Sensor | |
HMC2003 | |
KĐ ra 3 kênh | |
H1X,H1Y,H1Z | |
Jack I/O | |
(tới ADC) |
Hình 4.5 Sơ đồ nguyên lý Board Sensores phần thực nghiệm
3. Thiết kế mạch in và gia công Board Sensores
Căn cứ kích thước linh kiện, sơ đồ và kích thước chân các sensores như đã nêu trong mục 4.2.1, căn cứ mạch điện sơ đồ nguyên lý của Miniboard HMC-2003 và LY510ALH (hình 4.5), sử dụng phần mềm thiết kế mạch in “Orcad” ta có sơ đồ mạch in, phục vụ cho lắp ráp hai miniboard dưới đây, hình 4.6a,b.
a) Mạch in LY510ALH
b) Mạch in HMC2003
Hình 4.6 Sơ đồ mạch in các miniboard sensores
4.2.3 Lựa chọn ADC trên cơ sở Platform ElVIS-II của NI
Platform ElVIS-II của NI (National Instruments) là một thiết bị trợ giúp thiết kế, thử nghiệm các mạch điện tử số và tương tự dạng Platform khá mạnh. Phần cứng của thiết bị cho phép triển khai thiết kế các loại mạch điện tử từ linh kiện rời (điện trở, tụ điện, cuộn cảm, bán dẫn, IC số,…). Platform ELVIS-II (xem hình 4.7) được tổ chức dạng ma trận chân cắm linh kiện với những quy định riêng chân nguồn và đất. Có hệ thống nguồn chuẩn thay đổi được trong dải rộng phục vụ thí nghiệm. Có hệ thống phát tín hiệu chuẩn nhờ phần chương trình kết nối với máy tính. Có các đầu vào/ra (I/O) có thể nối với các máy phát tín hiệu, máy đo, phân tích tín hiệu từ bên ngoài. Phần mềm của thiết bị này có cả những chương trình phân tích, biến đổi, hiển thị tín hiệu, trong đó có biến đổi ADC và DAC.
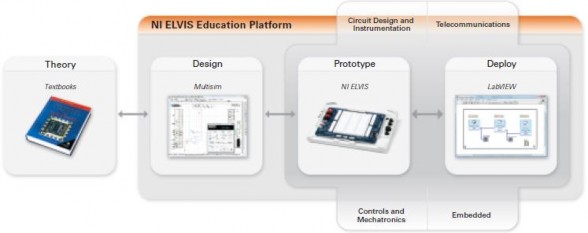
Hình 4.7 Giới thiệu tính năng của Platform ELVIS-II

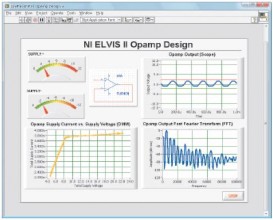
Tận dụng khả năng hỗ trợ thiết kế, xử lý kết quả nghiên cứu (xem hình 4.8) của Platform ELVIS có trong trang bị Phòng thí nghiệm, ta sử dụng chức năng biến đổi AD và hiển thị các kết quả khảo sát thông qua kết nối platform ELVIS-II với máy tính.
Hình 4.8 Kết nối Platform ELVIS-II với máy tính và giao diện thực nghiệm Những thông số cơ bản của bộ ADC trong Platform ELVIS-II.
+ Số lượng kênh analog đầu vào: 8
+ Độ phân giải: 16bit
+ Tốc độ lấy mẫu cực đại: 1.25MS/s đối với một kênh
1.00MS/s đa kênh
+ Dải tín hiệu đầu vào, V: 10; 5; 2; 1; 0,5; 0,2; 0,1;
+ Trở kháng đầu vào, Omh: 820
+ Dải thông đối với tín hiệu yếu (-3dB): 1.2MHz.
4.2.4 Mô tả về giá thử con quay ba chiều
4
5
3
2 1
Giá quay ba chiều là thành phần không thể thiếu trong thử nghiệm đo VTG theo VTT. Có thể hình dung giá quay ba chiều là công cụ mô phỏng các chuyển động quay của hệ TĐLK của TBB mà trên đó ta đặt Board Sensores. Trong lựa chọn của tác giả, để tạo các chuyển động quay cho Board Sensores, ta sử dụng giá quay 3 trục thử các loại con quay điện – cơ trong PTN của Bộ môn tên lửa (xem hình 4.9).
Giá quay có cấu tạo của một bộ 3 khung Cardan quay độc lập theo 3 bậc tự do trong 3 mặt phẳng. Chuyển động quay trong hai mặt phẳng (gật và liệng) được thực hiện bằng tay quay (3, 5) và đo bằng kim trên thang khắc độ (4, 6). Độ chính xác trên thang chia độ nhỏ hơn hoặc bằng một vạch chia là 0,1 độ.
Hình 4.10 Kích thước tấm gá chuyên dụng trên giá quay
Chuyển động quay trong mặt phẳng hướng được thực hiện tự động nhờ bộ truyền động điện của giá quay (1). Góc quay hướng được kiểm tra bằng thang chia độ (2). Để gá Board Sensores lên giá quay được chính xác (đồng trục với giá quay) ta sử dụng tấm gá chuyên dụng có hình dạng, kích thước như mô tả ở hình 4.10.
Hình 4.9 Giá quay ba trục
4.2.5 Sơ đồ kết nối phần cứng
Sơ đồ chức năng kết nối phần cứng được thể hiện trên hình 4.11(a,b)
Bộ nguồn chất lượng cao
Board ELVIS II biến đổi AD và ghép nối với máy tính
Máy tính cá nhân sử lý và thực hiện các thuật toán lọc
Giá quay 3 bậc tự do có gắn board cảm biến từ trường trái đất + cảm biến vận tốc góc
Kết quả sử lý (H1x. H1y, H1z)
ω1x. ω 1y ,ω 1z
a) Sơ đồ chức năng kết nối phần cứng
2
3
4
1
1. Giá quay 3 bậc tự do
2. Board cảm biến
3. Board ELVIS II để biến đổi AD
4. Máy tính cá nhân
b) Hình ảnh kết nối phần cứng Hình 4.11 Sơ đồ kết nối phần cứng
Quá trình thử nghiệm được tiến hành như sau: board cảm biến từ trường trái đất và cảm biến vận tốc góc được gắn trên giá quay 3 trục tự do. Board cảm biến và giá quay được cấp bằng hai nguồn độc lập. giá quay có thể quay xung quanh các trục của mình bằng tay quay hoặc quay bằng điện nhờ môtơ điện gắn trong giá quay. Các thành phần VTT theo các trục Hx, Hy, Hz và thành phầnVTG theo trục Y đo được từ các cảm biến trên tồn tại dưới dạng điện áp tương tự được biến đổi ADC và ghép nối vào máy tính cá nhân thông qua Board ELVIS II. Các chương trình phần mềm, theo những thuật toán lọc phi tuyến tối ưu đã giới thiệu ở mục 3.3 của chương 3 tiến hành ước lượng trạng thái và đưa ra các kết quả về các thành phần H1x, H1y, H1z, và các VTG 1x,, 1y,
, 1z. trên cơ sở của các tham số này mà ta có thể tính ra được các góc gật, góc