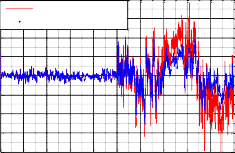
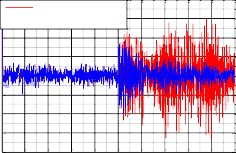
Khi cho nhiễu tác động nhỏ, sai số đánh giá các VTT và VTG sử dụng thuật toán EKF mô phỏng theo phương pháp thực nghiệm Monte Carlo được thể hiện trên hình 3.7.(a, b, c, d, e, f)
2
Sai so danh gia H1x
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
2
Sai so danh gia w1x
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
H1x | |||||||||
Có thể bạn quan tâm!
-
 Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb
Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb -
 Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb
Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb -
 Mô Phỏng Đánh Giá Các Mô Hình Hệ Thống Xác Định Vtg Đã Xây Dựng
Mô Phỏng Đánh Giá Các Mô Hình Hệ Thống Xác Định Vtg Đã Xây Dựng -
 Thiết Kế Và Tổ Chức Phần Cứng Thực Nghiệm
Thiết Kế Và Tổ Chức Phần Cứng Thực Nghiệm -
 Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm
Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm -
 Cấu Trúc Các Kênh Điều Khiển Định Hướng Tbb Và Phương Pháp Phối Ghép Với Các Bộ Đo Góc Và Vtg
Cấu Trúc Các Kênh Điều Khiển Định Hướng Tbb Và Phương Pháp Phối Ghép Với Các Bộ Đo Góc Và Vtg
Xem toàn bộ 151 trang tài liệu này.
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
a. Sai số đánh giá H1x
-2
W1x | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
d. Sai số đánh giá ω1x
2
Sai so danh gia H1y
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
2
Sai so danh gia w1y
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
H1y | |||||||||
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
b. Sai số đánh giá H1y
-2
w1y | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
e. Sai số đánh giá ω1y
2
Sai so danh gia H1z
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
2
Sai so danh gia w1z
1.5
1
0.5
0
-0.5
-1
-1.5
-3
x 10
H1z | |||||||||
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
c. Sai số đánh giá H1z
-2
w1z | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
f. Sai số đánh giá ω1z
Hình 3.7 Sai số đánh giá các VTT và VTG khi sử dụng thuật toán EKF khi cho nhiễu tăng. Mô phỏng theo phương pháp thực nghiệm Monte
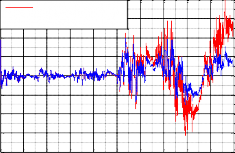
Khi nhiễu tác động nhỏ sai số đánh giá các VTT và VTG khi sử dụng thuật toán UKF. Mô phỏng theo phương pháp thực nghiệm Monte Carlo được thể hiện trên hình 3.8
2
1.5
Sai so danh gia H1x
1
0.5
0
-0.5
-1
-1.5
-3
x 10
2
1.5
Sai so danh gia w1x
1
0.5
0
-0.5
-1
-1.5
-3
x 10
Sai so danh gia H1x | |||||||||
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
a. Sai số đánh giá H1x
-2
Sai so danh gia w1x | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
d. Sai số đánh giá ω1x
2
1.5
Sai so danh gia H1y
1
0.5
0
-0.5
-1
-1.5
-2
-3
x 10
Sai so danh gia H1y | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
b. Sai số đánh giá H1y
2
1.5
Sai so danh gia w1y
1
0.5
0
-0.5
-1
-1.5
-2
-3
x 10
Sai so danh gia w1y | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
e. Sai số đánh giá ω1y
2
1.5
Sai so danh gia H1z
1
0.5
0
-0.5
-1
-1.5
-2
-3
x 10
Sai so danh gia H1z | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
c. Sai số đánh giá H1z
2
1.5
Sai so danh gia w1z
1
0.5
0
-0.5
-1
-1.5
-2
-3
x 10
Sai so danh gia w1z | |||||||||
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s) .
f. Sai số đánh giá ω1z
Hình 3.8 Sai số đánh giá các VTT và VTG khi sử dụng thuật toán UKF. Mô phỏng theo phương pháp thực nghiệm thống kê Monte Carlo
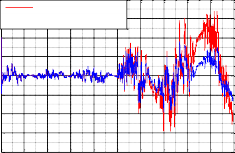
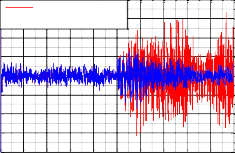
Việc so sánh chất lượng của 2 bộ lọc EKF và UKF với nhau thông qua việc so sánh sai số đánh giá các thành phần VTT và VTG của hai bộ lọc chạy đồng thời trong cùng một điều kiện thử nghiệm.
Kết quả mô phỏng khi cho hai thuật toán EKF và UKF chạy đồng thời được thể hiện trên hình 3.9.
-3
x 10
Sai so H1x EKF Sai so H1x UKF | ||||||||||
4
3
2
Sai so H1x
1
0
-1
-2
-3
-3
x 10
Sai so w1x EKF Sai so w1x UKF | ||||||||||
4
3
2
Sai so w1x
1
0
-1
-2
-3
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
a. Sai số đánh giá H1x
-3
x 10
Sai so H1y EKF Sai so H1y UKF | ||||||||||
4
3
2
Sai so
1
0
-1
-2
-3
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
b. Sai số đánh giá H1y
-3
x 10
Sai so H1z EKF Sai so H1z UKF | ||||||||||
4
3
2
Sai so H1z
1
0
-1
-2
-3
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
c. Sai số đánh giá H1z
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
d. Sai số đánh giá ω1x
-3
x 10
Sai so w1y EKF Sai so w1y UKF | ||||||||||
4
3
2
Sai so w1y
1
0
-1
-2
-3
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
e. Sai số đánh giá ω1y
-3
x 10
Sai so w1z EKF Sai so w1z UKF | ||||||||||
4
3
Sai so w1z
2
1
0
-1
-2
-3
-4
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
f. Sai số đánh giá ω1z
Hình 3.9 Sai số đánh giá các VTT và VTG khi sử dụng thuật toán EKF và UKF
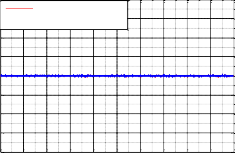
Ở nửa đầu của quá trình khi nhiễu tác động nhỏ, kết quả ở cả hai phương pháp UKF và MS-AUKF sai số đánh giá có thể coi là giống nhau. Ở nửa sau của quá trình ta cho nhiễu tác động lớn thì phương pháp MS-AUKF có hiệu quả hơn so với phương pháp UKF.
2
1.5
1
Sai so H1x
0.5
0
-0.5
-1
-1.5
-3
Sai so H1x(UKF)
Sai so H1x(MSAUKF)
x 10
2
1.5
1
Sai so w1x
0.5
0
-0.5
-1
-1.5
-3
x 10
Sai so w1x(UKF)
Sai so w1x(MSAUKF)
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
a. Sai số đánh giá H1x
-3
x 10
Sai so H1y(UKF)
Sai so H1y(MSAUKF)
2
1.5
1
Sai so H1y
0.5
0
-0.5
-1
-1.5
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
b. Sai số đánh giá H1y
-3
x 10
Sai so H1z(UKF)
Sai so H1z(MSAUKF)
2
1.5
1
Sai so H1z
0.5
0
-0.5
-1
-1.5
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
c. Sai số đánh giá H1z
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
d. Sai số đánh giá ω1x
-3
x 10
Sai so w1y(UKF)
Sai so w1y(MSAUKF)
2
1.5
1
Sai so w1y
0.5
0
-0.5
-1
-1.5
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
e. Sai số đánh giá ω1y
-3
x 10
Sai so w1z(UKF)
Sai so w1z(MSAUKF)
2
1.5
1
Sai so w1z
0.5
0
-0.5
-1
-1.5
-2
0 10 20 30 40 50 60 70 80 90 100
Thoi gian(s)
f. Sai số đánh giá ω1z
Hình 3.10 Sai số đánh giá các VTT và VTG khi sử dụng thuật toán MS-AUKF. Mô phỏng theo phương pháp thực nghiệm Monte Carlo.
Đánh giá kết quả khảo sát:
1. Nếu các phép đo từ trường không có sai số thì có thể tính trực tiếp các thành phần VTG ω1x và ω1z (xem hình 3.5a). Nếu các phép đo từ trường có sai số dù rất nhỏ, thì các phép tính trực tiếp vẫn có sai số rất lớn (xem hình 3.5b). Trong trường hợp chung không thể sử dụng cách tính trực tiếp các thành phần VTG vì luôn tồn tại sai số đo.
2. Sử dụng thuật toán EKF hoặc UKF ta có thể hoàn toàn ước lượng được không chỉ các thành phần VTG không được quan sát ω1x, ω1z mà còn cả chính bản thân các phép đo từ trường H1x, H1y, H1z. Chất lượng của thuật toán UKF có tốt hơn so với thuật toán EKF nhưng không đáng kể (xem hình 3.9).
3. Khi nhiễu đo tăng lên tại thời điểm t=50(s), thì sai số ước lượng của cả hai thuật toán EKF và UKF đều tăng rất lớn (hình 3.7, 3.10).
4. Sử dụng thuật toán UKF thích nghi (MS-AUKF) ta có thể giải quyết hầu hết nhược điểm của các thuật toán EKF và UKF trước sự thay đổi của nhiễu đo (hình 3.10a, b, c, d, f).
Kết luận chương 3
Trong chương này luận án đã xây dựng, lựa chọn thuật toán đo tối ưu đối với các thành phần của VTT và VTG của TBB trên cơ sở các phép đo VTT và
thông tin VTG bổ sung từ cảm biến độc lập
1y . Trong chương 3 tác giả đã:
- Tổng hợp được mô hình bộ lọc phi tuyến tĩnh (hệ số cố định) và động (có tín hiệu sai số tiên nghiệm). Khảo sát hai mô hình lọc phi tuyến đã nêu và rút ra những kết luận quan trọng liên quan tới tính hội tụ, phân kỳ, tính chất động học và sai số do tác động của nhiễu tạp đo gây ra.
- Đề xuất, xây dựng và tổng hợp được 3 mô hình các bộ lọc Kalman rời rạc tối ưu là EKF, UKF và MS-AUKF đều có khả năng lọc, xử lý tốt đối với nhiễu đo có những đặc trưng thống kê ổn định.
- Khảo sát những phương án lọc phi tuyến tối ưu đã đề xuất trên cơ sở những điều kiện và dữ liệu ban đầu tương tự như đã khảo sát cho bộ lọc phi tuyến có tín hiệu sai số tiên nghiệm, nhưng với tình huống nhiễu thay đổi. Kết quả cho thấy cả 3 phương án lọc Kalman rời rạc đều hội tụ tốt với sai số nhỏ. Tính chống nhiễu và tính chất động học được cải thiện tốt hơn bộ lọc phi tuyến động. Tuy nhiên khi tình huống nhiễu thay đổi chỉ có bộ lọc Kalman mở rộng thích nghi (MS- AUKF) vẫn đáp ứng được những yêu cầu về động học và sai số.
Từ những kết luận chính trên có thể đi tới lựa chọn mô hình đo – xử lý thông tin VTG của TBBKNL sử dụng từ trường Trái đất là mô hình bộ lọc rời rạc tối ưu thích nghi MS-AUKF.
Nội dung chương tiếp theo của luận án là chứng minh khả năng hiện thực hóa bộ đo – xử lý thông tin VTG của TBB dựa trên những thử nghiệm thực tế.
Chương 4
THỰC NGHIỆM ĐÁNH GIÁ KHẢ NĂNG THỰC TẾ HÓA
HỆ ĐO – XỬ LÝ THÔNG TIN VẬN TỐC GÓC CỦA THIẾT BỊ BAY THEO TỪ TRƯỜNG TRÁI ĐẤT
Chương này là phần thực nghiệm của luận án, nhằm mục đích đánh giá khả năng hiện thực hóa bằng thiết bị những mô hình bộ lọc phi tuyến tối ưu EKF, UKF và MS-AUKF đã tổng hợp theo lý thuyết ở chương 3, lựa chọn phương án thiết bị khả thi và khả năng phối ghép với các kênh điều khiển TBBKNL.
Trong chương này dựa trên những mô hình toán học các bộ lọc phi tuyến đã mô phỏng ở chương 3 ta tiến hành xây dựng thành thiết bị trên cơ sở lựa chọn linh kiện cảm biến, phương pháp biến đổi tín hiệu Analog – Digital và xây dựng các chương trình phần mềm phục vụ khảo sát đánh giá kết quả thực nghiệm; cấu trúc các kênh ĐKTBB và phương pháp phối ghép.
Thực nghiệm được tiến hành theo những bước sau.
1. Thiết kế, xây dựng phần cứng (phần thiết bị), bao gồm: lựa chọn các cảm biến; thiết kế sơ đồ nguyên lý, sơ đồ mạch in của Board sensores; lựa chọn bộ ADC (Analog Digital Convertor),bộ giá quay 3 chiều thử nghiệm và phương tiện hỗ trợ tính toán xử lý thông tin là máy tính số (thay cho bộ vi điều khiển sau này).
2. Thiết kế, xây dựng phần mềm, bao gồm: xây dựng các giao diện và chương trình phần mềm tương ứng với các bộ lọc số phi tuyến tối ưu EKF, UKF và MS-AUKF; xây dựng các phần mềm hiển thị và đánh giá kết quả đo
– xử lý tín hiệu.
3. Đánh giá kết quả thực nghiệm, bao gồm đánh giá: chất lượng các phương pháp lọc phi tuyến tối ưu và lựa chọn; khả năng thực tế hóa các bộ đo vận tốc góc.
4. Giới thiệu cấu trúc có sẵn các kênh điều khiển gật, hướng và liệng của TBBKNL, phương pháp ghép nối với khối đo – cảm biến góc và VTG.
4.1 Mô tả thực nghiệm
Thí nghiệm tiến hành bằng cách gá bo mạch có gắn các cảm biến lên giá quay ba chiều, thông tin về từ trường ba trục và VTG cần đo vì thế sẽ thay đổi. Chúng sẽ được biến đổi thành tín hiệu số và được dùng để cập nhật phép đo cho quá trình ước lượng.
Thông tin tiên nghiệm của các trạng thái có thể xác định nhờ việc thiết lập vị trí ban đầu của TBB. Đối với bài thực nghiệm thông tin tiên nghiệm được xác định bởi vị trí ban đầu của bo mạch đặt trên giá quay tự động.
Như ta đã biết, các thành phần VTG được coi là quá trình ngẫu nhiên Mackov [35], chúng được đặc trưng bởi hằng số thời gian và mật độ phổ của tạp hình thành. Dựa vào đặc trưng dải tần số của các thành phần vận tốc góc ta có thể xác định các hằng số thời gian của các quá trình Mackov đó, nó cũng chính là hằng số thời gian của bộ lọc tạo hình (bộ lọc thông thấp). Còn độ lớn của mật độ phổ tạp hình thành được xác định dựa vào độ tản mát của chính bản thân thành phần vận tốc góc. Như vậy ta có cơ sở để xác định được hằng số thời gian và mật độ phổ tạp hình thành, chúng là thông tin tiên nghiệm cần đưa vào thuật toán lọc.
Thông tin về sai số các phép đo có thể xác định nhờ việc xem xét bản chất và nguồn sai số đo của từng cảm biến. Thông qua việc tìm hiểu sai số đo ta có thể biết được ma trận phương sai của nhiễu đo, và đặt chúng làm thông tin tiên nghiệm để tổng hợp bộ lọc. Riêng với cảm biến đo tốc độ góc ta cấn phải quan tâm và xử lí bias của phép đo, giải pháp nâng cao độ chính xác lọc khi tính đến nguồn sai số này cũng đã được đề cập.
Các thông tin tiên nghiệm khác được tính toán trực tiếp từ các công thức đã dẫn. Tất cả các thông tin tiên nghiệm sẽ được khởi tạo thông qua bước khởi tạo của phần mềm.