Các ứng dụng của AUV:
Quân sự: AUV có thể kết hợp với công nghệ sonar cho phép phát hiện các vật thể không xác định để đảm bảo an toàn cho một khu vực biển, điều này là đặc biệt quan trọng trong chiến lược chống chiến tranh trên biển.
Khai thác: Khả năng khai thác khoáng sản của AUV được thể hiện ở khả năng dò tìm kim loại quặng dưới lòng đại dương, thay vì trước đây phải dò tìm trên tàu với độ tin cậy thấp hơn. Không những thế, AUV có thể quét những vùng có nhiều hải sản cho phép tàu bè đánh bắt với hiệu suất cao nhất.
Nghiên cứu: Khai phá các tầng đại dương, nghiên cứu các sự sống nằm sâu dưới đáy biển, các mặt cắt địa chất, các mẫu nước, mẫu vật chất sẽ được gửi lên bờ để phân tích và xử lí.
Môi trường: Sử dụng các công cụ tiến tiến như camera kỹ thuật số, camera hồng ngoại, sóng siêu âm… để giám sát tác động của sự bào mòn, tắc nghẽn, các vết nứt của các công trình biển. Bám theo các đường ống dẫn dầu, dẫn khí để kiểm tra có hay không sự rò rỉ, xác định độ bền của ống, đảm bảo xử lí sự cố nhanh nhất có thể. Nếu có sự cố như nứt, rò rỉ xảy ra, thì các AUV được trang bị cánh tay robot sẽ thực hiện các chức năng cắt, hàn, nối… tránh dầu, khí chảy loang ra biển gây ô nhiễm. Theo thống kê trong [10], loại AUV và chức năng, nhiệm vụ có thể kể đến như Bảng 1.2.
Bảng 1. 2 Thống kê tàu tự hành AUV
Năm | Tên thiết bị | Ứng dụng | |
Mỹ | 2000 | C-series AUVs | Kiểm tra tính ổn định, khảo sát môi trường |
FENRIR | Chuyên chở UUV | ||
Sentry | Khảo sát và bảo vệ bến cảng | ||
2003 | SWIMS | Điều tra mỏ khoáng sản | |
SeaFox | Kiểm tra khả năng thích ứng kết hợp định vị, điều khiển, dẫn đường | ||
2004 | Springer | Khảo sát môi trường, mẫu thí nghiệm giảng dạy |
Có thể bạn quan tâm!
-

 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 1
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 1 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 2
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 2 -
 Tổng Quan Về Robot Lặn Tự Hành Auv (Autonomous Underwater Vehicle)
Tổng Quan Về Robot Lặn Tự Hành Auv (Autonomous Underwater Vehicle) -
 Các Nghiên Cứu Về Điều Khiển Auv Trên Thế Giới
Các Nghiên Cứu Về Điều Khiển Auv Trên Thế Giới -
 Tổng Quan Về Mạng Nơ-Ron Nhân Tạo Trong Điều Khiển
Tổng Quan Về Mạng Nơ-Ron Nhân Tạo Trong Điều Khiển -
 Điều Khiển Tự Động Dùng Mạng Nơ-Ron Nhân Tạo
Điều Khiển Tự Động Dùng Mạng Nơ-Ron Nhân Tạo
Xem toàn bộ 169 trang tài liệu này.
MUSCL | Trinh sát, phòng thủ quân sự | ||
Anh | 2000 | Barracuda | Phát hiện mục tiêu trên biển |
2008 | Blackfish | Giám sát hải cảng | |
Gầy đây | C –Enduro USV | Ứng dụng năng lượng mặt trời cho tàu tự hành để giám sát môi trường biển | |
Canada | 2000 | HammerHead | Mô phỏng lại khả năng tránh các mối đe dọa |
2004 | SESAMO | Quan trắc môi trường | |
2005 | Charlie | Quan trắc môi trường | |
2007 | ALANIS | Quan trắc môi trường | |
Gần đây | Kingfisher | Phục vụ quân sự | |
Italy | 2000 | CARVELA | Lập bản đồ |
2004 | DELFIM | Giao tiếp với UUV | |
2008 | U-Rangger | Phục vụ quân sự | |
Bồ Đào Nha | 2006 | Swordfish | Quan trắc môi trường |
2008 | Kaasboll | Kiểm tra hệ thống định vị và điều khiển | |
2008 | Viknes | Kiểm tra nhiều mục đích | |
Israel | 2007 | Silver Marlin | Giám sát, trinh sát |
Đức | 2005 | Basil | Khảo sát đường ống ngoài khơi |
Pháp | 2007 | Inspector | Giám sát, trinh sát |
Singapore | 2008 | Tianxiang One | Khảo sát khí tượng |
2010 | Venus | Nhiều ứng dụng | |
Trung Quốc | 2010 | USV-ZhengHe | Thu thập dữ liệu môi trường thủy văn |
Nhật Bản | 2004 | UMV series | Khảo sát môi trường biển |
Nguồn: Báo cáo phân tích xu hướng công nghệ: “Xu hướng nghiên cứu và ứng dụng robot ngầm tự hành phục vụ quan trắc môi trường, khảo sát sông hồ và cứu hộ cứu nạn” – Sở KHCN TP Hồ
Chí Minh 2019.
1.1.2 Các ứng dụng của AUV tại Việt Nam
Cùng với sự phát triển của công nghệ, các thiết bị di chuyển dưới nước tự động (Autonomous Underwater Vehicle - AUV) đang ngày càng trở nên phổ biến. Do là phương tiện tự hành dưới nước không cần người lái nhằm thực hiện nhiệm vụ khảo sát nghiên cứu hoặc quân sự với nhiều ưu điểm vượt trội thay thế con người nên tại Việt Nam cũng đã có những nghiên cứu phát
triển. AUV hiện đang góp mặt trong nhiều ứng dụng khác nhau, từ quân sự đến dân sự, từ kinh tế đến nghiên cứu khoa học [7], [10].
Tại Việt Nam, AUV hiện chỉ mới được nghiên cứu những năm gần đây. Những AUV đầu tiên do các nhóm nghiên cứu robot phát triển với mục đích đơn thuần là xây dựng các mô hình nhỏ để nghiên cứu lý thuyết, với kết cấu tương đối đơn giản, ví dụ như robot cá với khả năng di chuyển phỏng sinh học, mô hình AUV, ROV.

Hình 1.1 Nghiên cứu AUV mô hình tại trường ĐH Bách khoa Hà Nội [7]
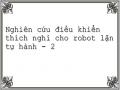
Hình 1.2 KIAL – AUV của ĐH Bách khoa TP Hồ Chí Minh phối hợp nghiên cứu với Hàn Quốc [10]
1.1.3 Mô hình toán học và phương trình động học tổng quát của AUV
Mô hình hóa AUV thường dựa trên thiết kế cơ khí, các nguyên lí động học và tĩnh học. Tĩnh học ở đây là quan tâm tới vấn đề cân bằng của AUV khi không có lực tác dụng hoặc đang di chuyển với vận tốc không đổi. Động học giải quyết bài toán gia tốc chuyển động khi có sự tác động của lực từ chân vịt hoặc lực bên ngoài [4], [7], [8], [9], [10].
Để xây dựng mô hình toán học cho AUV, chúng ta có thể xem AUV trong không gian như một robot có 6 bậc tự do độc lập (6 DOF), xem AUV như một vật rắn, chuyển động xoay của Trái Đất không ảnh hưởng đến gia tốc của khối tâm và các hệ số thủy động lực học là hằng số [21], [22], [26- 28], [31].
Khi phân tích chuyển động của tàu trong 6 DOF, để thuận tiện người ta đưa ra 2 hệ trục tọa độ có tâm trái đất làm tham chiếu như hình dưới. Ngoài ra cũng còn có thêm nhiều hệ trục tọa độ khác phù hợp với từng mục đích nghiên cứu.
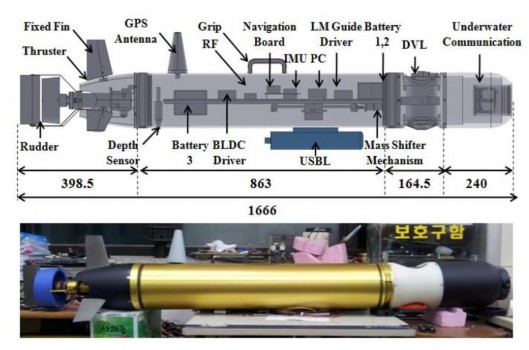
Hình 1.3 Hệ trục tọa độ ECEF
Hệ trục tọa độ tham chiếu tâm Trái Đất:
• Hệ trục tọa độ ECI (the Earth-centered Earth-fixed): {i} = (xi, yi, zi) là một hệ trục tọa độ quán tính được dùng trong định hướng trên mặt đất, trong đó áp dụng các định luật chuyển động của Newton. Bao gồm các hệ
thống định hướng quán tính. Gốc {i} được đặt tại tâm Oi của Trái Đất như hình 1.3
• Hệ trục tọa độ ECEF (the Earth-centered Earth-fixed): {e} = (xe, ye, ze) có tâm Oe đặt tại tâm của Trái Đất nhưng các trục thì lại quay tương đối so với hệ trục ECI ( được cố định trong không gian) với vận tốc góc là
𝜔𝑒 = 7.2921 × 10−5 rad/s. Đối với các thiết bị di chuyển với tốc độ tương đối thấp, ảnh hưởng do sự xoay của Trái Đất có thể được loại bỏ, do đó hệ
{e} có thể được xem như là hệ quán tính. Tuy nhiên khi xét đến sự trôi của tàu thì không nên loại bỏ sự quay của Trái Đất. Hệ tọa độ {e} thường được sử dụng cho định hướng, dẫn đường và điều khiển toàn cầu, ví dụ để mô tả chuyển động và vị trí của tàu bè khi di chuyển từ lục địa này sang lục địa khác.
Các hệ trục tọa độ địa lý:
• Hệ trục tọa độ NED (the North-East-Down): Đây là hệ trục tọa độ mà chúng ta luôn đề cập đến thường ngày. {n} = (xn, yn, zn) với gốc On được định nghĩa liên quan tới mặt ellipsoid tham chiếu của Trái Đất. Nó thường được định nghĩa như là một mặt phẳng tiếp xúc trên bề mặt Trái Đất di chuyển cùng với AUV, nhưng có các trục hướng theo các hướng khác so với các trục cố định của AUV. Đối với hệ trục này thì trục x hướng về phương Bắc, trục y hướng về hướng Đông còn trục z thì chỉ xuống dưới bề mặt Trái Đất. Vị trí của {n} tương đối so với {e} được xác định bằng việc sử dụng hai góc l và μ( kinh độ và vĩ độ).
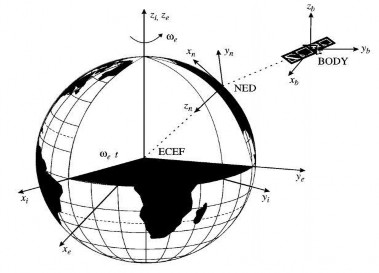
• Hệ trục tọa độ BODY của AUV (the body-fixed reference frame):
{b}=(xb, yb, zb) với gốc Ob là một hệ tọa độ chuyển động, nhưng cố định so với AUV. Vị trí và hướng của AUV được mô tả tương đối so với hệ trục quán tính (xấp xỉ bởi {e} hoặc {n} ) trong khi đó vận tốc dài và vận tốc góc của AUV nên được mô tả trong hệ trục tọa độ body-fixed. Gốc Ob thường được chọn trùng với điểm giữa của AUV, được gọi là CO. Đối với các phương tiện hàng hải, các trục của hệ BODY được chọn như hình 1.4:
Hình 1.4 Các vận tốc u, v, w, p, q, r trong hệ tọa độ Body-fixed.
- xb: trục dọc (từ đuôi tàu đến mũi tàu)
- yb: trục ngang (mạn tàu hướng từ trái qua phải).
- zb: trục vuông góc (hướng từ trên xuống đáy tàu).
Bảng 1. 3 Bảng quy ước các đại lượng
Chuyển động | Lực và Moment | Vận tốc dài và vận tốc góc | Vị trí và góc Euler | |
1 | Chuyển động trong trục x (surge) | X | u | x |
2 | Chuyển động trong trục y (sway) | Y | v | y |
3 | Chuyển động trong trục z (heave) | Z | w | z |
4 | Quay quanh trục x (roll, heel) | K | p | 𝜙 |
5 | Quay quanh trục y (pitch, trim) | M | q | 𝜃 |
6 | Quay quanh trục z (yaw) | N | r | 𝜓 |
Các chuyển động chung của AUV trong hệ tọa độ 6 DOF có thể được mô tả thành các vector sau:
𝜂 = [𝑝𝑇 , Θ𝑇 ] , 𝑝 = [𝑥, 𝑦, 𝑧]𝑇 , Θ = [𝜙, 𝜃, 𝜓]𝑇 ;
V = [𝑣𝑇 , 𝜔𝑇 ] , 𝑣 = [𝑢, v, 𝑤]𝑇 , 𝜔 = [𝑝, 𝑞, 𝑟]𝑇 ;
𝜏 = [𝑓𝑇 , ɱ𝑇 ] , 𝑓 = [𝑋, 𝑌, 𝑍]𝑇 , ɱ = [𝐾, 𝑀, 𝑁]𝑇 ;
Trong đó:
𝜂: vector vị trí và hướng của AUV trong hệ trục tọa độ {n}.
𝑝: vị trí của hệ trục tọa độ {b} so với hệ trục tọa độ {n}. Θ: góc xoay giữa hệ trục tọa độ {b} và hệ trục tọa độ {n}.
𝑉: vector vận tốc dài và vận tốc góc của AUV ({b} so với {n}) trong hệ tọa độ {b}.
𝑣: vận tốc dài của AUV ({b} so với {n}) trong hệ tọa độ {b}.
𝜔: vận tốc góc của AUV ({b} so với {n}) trong hệ tọa độ {b}.
𝜏: lực và moment tác động lên AUV trong hệ trục tọa độ {b}.
𝑓: lực tác động lên AUV trong hệ trục tọa độ {b}.
ɱ: moment tác động lên AUV trong hệ trục tọa độ {b}.
Sự chuyển đổi giữa hệ BODY và hệ NED:
Hệ trục tọa độ {b} được xác định hướng so với hệ trục tọa độ quy chiếu
{n} bằng 3 góc roll (𝜙 ), pitch (𝜃 ) và yaw (𝜓 ).
Nếu xoay hệ trục tọa độ {b} xung quanh trục z, y, x của hệ trục tọa độ
{n} ta có các ma trận chuyển đổi lần lượt như sau:
(1.1) |
𝑏
Chúng ta kết hợp 3 phép xoay ở trên để có được ma trận chuyển đổi 𝑅𝑛 :
(1.2) |
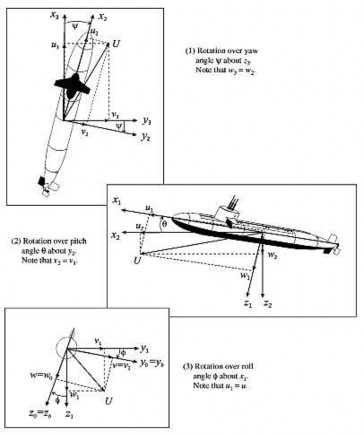
Hình 1.5 Các góc xoay Euler.
Ta được công thức:
(1.3) |
Theo tài liệu [5], ta có được ma trận chuyển đổi vận tốc góc từ hệ tọa độ {b} sang hệ tọa độ {n} như sau:
(1.4) | |
1 𝑠𝜙𝑡𝜃 𝑐𝜙𝑡𝜃 𝑇𝑛 = [0 𝑐𝜙 −𝑠𝜙 ] 𝑏 0 𝑠𝜙/𝑐𝜃 𝑐𝜙/𝑐𝜃 | (1.5) |
𝑏
𝑏
Cần lưu ý là ma trận 𝑇𝑛 không xác định tại góc pitch 𝜃 = ±900 . Với một lượng góc xoay nhỏ 𝛿𝜙 , 𝛿𝜃 , 𝛿𝜓 ma trận 𝑇𝑛 được viết đơn
giản thành:
(1.6) |