Bổ sung phương trình (4.9) vào hệ (4.1) và thay phép đo ở (4.7) vào (4.3) ta sẽ thu được mô hình động học và mô hình quan sát mới. Phần tính toán mặc dù có phức tạp hơn nhưng sẽ có độ chính xác ước lượng cao hơn.
UKF Master
UKF Slaver
Các phương trình cập nhật thời gian
* f ( )
k|k1 k1
ˆ
k|k1
P
2n
wm*
i i,k|k1
i0
xk|k 1
wm(*ˆ
2n
i
i,k|k1 k|k1 i,k|k1 k|k1 k1
)(*ˆ
)T Q
i0
k|k1 k|k1 k|k1
ˆ
,ˆ
(1 )P ,ˆ
xk|k 1
k|k1
(1 )P
xk|k 1
k|k1 k|k1
H
2n
Z
ˆ
k|k1 i i,k|k1
w
m
i0
Vector đo theo thời gian z1, z2, …
Vk inovation
Các phương trình cập nhật phép đo
P
xk xk
w ( Zˆ
2n
c
i i,k|k1 k|k1 i,k|k1 k|k1 k
)( Zˆ
)T R
i0
P
xk zk i i,k|k1 k|k1 i,k|k1 k|k1 k
w (ˆ
2n
c
)(ˆ )T R
i0
K P
k xk zk xk xk
P1
xˆ xˆ K (z Zˆ
k k|k1 k k k|k1 xk
), P P
xk|k 1
K P
k xk xk k
KT
Khởi tạo bộ lọc
xˆ0 Ex0
x0
P E (x xˆ )(x xˆ )
0
0 0
0
T
Tính các điểm sigma
xˆ , xˆ (1)P , xˆ (1)P
k1 k1 k1
x k1
k1
x
k1
Vector trạng thái ước lượng tối ưu xˆ k
Slaver-I: Khởi tạo
ˆ0 E0
P E (
0 0 0 0
0
)( )
ˆ
ˆ T
Slaver-II: Tính điểm Sigma
, (1)P , (1)P
k1 k1 k1
ˆ ˆ
ˆ
k1
k 1
k 1
Slaver-III: Cập nhật thời gian
* f ( )
k|k1 k1
ˆ
2n
k|k1 i i,k|k1
wm*
i0
P
k|k 1
w (
2n
m *
i i,k|k 1
k|k 1
)(
ˆ
*
i,k|k 1
k|k 1
) Q
ˆ
T
i0
k|k1 k|k1 k|k1
ˆ ,ˆ
(1 )P ,ˆ
k|k 1
k|k1
(1 )P
k|k 1
k|k1 k|k1
g( )
ˆ
Sk|k1 i i,k|k1
2n
w
m
i0
P
Slaver-IV: Cập nhật phép đo
2n
SkSk
w ( Sˆ )( Sˆ )T R
c
i i,k|k1 k|k1 i,k|k1 k|k1
i0
P
kSk i i,k|k1 k|k1 i,k|k1 k|k1
w (ˆ )(ˆ )T R
2n
c
i0
K P
P1
ˆˆ K (S Sˆ ), P P
k kSk SkSk
k k|k1 kk k|k1 k
k|k 1
K P
k SkSk k
KT
Phương sai nhiễu
ˆ ˆ
k k k1 k k k1
K
k
(S S
ˆ
)
Hình 4.16 Lưu đồ thuật toán lọc MS-AUKF
Có thể áp dụng cả hai thuật toán lọc EKF và lọc UKF để giải bài toán này.
Thực nghiệm dùng thuật toán lọc MS-AUKF.
4. Giao diện khởi tạo và hiển thị (hình 4.17)
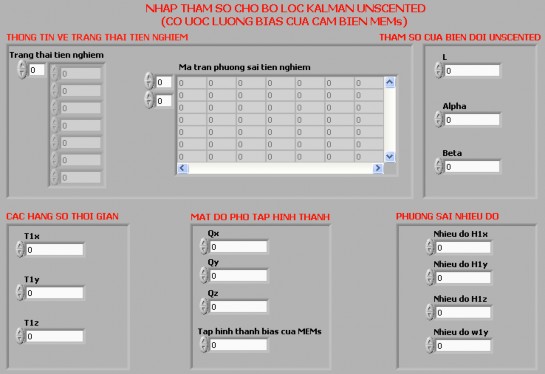
Hình 4.17 Giao diện khởi tạo và hiển thị tham số bộ lọc MS-AUKF
4.4 Đánh giá kết quả thực nghiệm
4.4.1 Đánh giá chất lượng xử lý thông tin của các thuật toán lọc
- So sánh đối chiếu kết quả thực nghiệm sử dụng các bộ lọc EKF, UKF và MS-AUKF
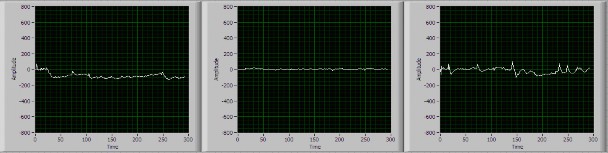
Kết quả của việc thực hiện các thuật toán lọc thể hiện ở giá trị đo trước và sau lọc của các trạng thái (VTT ba trục và các vector VTG theo hệ TĐLK của TBB). Kết quả thực nghiệm được hiển thị dưới dạng đồ thị hình 4.18, 4.19, 4.20, 4.21 và 4.22 tương ứng với kết quả đo: H1x; H1y; H1z; 1x; 1y; 1z.
a) Kết quả đo H1x b) Kết quả đo H1y c) Kết quả đo H1z Hình 4.18 Kết quả đo VTT khi sử dụng bộ lọc EKF (đơn vị gauss)
(đường màu đỏ là đo trước lọc; màu trắng là sau lọc)
a) Kết quả đo 1x b) Kết quả đo 1y c) Kết quả đo 1z
Hình 4.19 Kết quả đo các thành phần VTG (đơn vị đo 10-3rad/s)
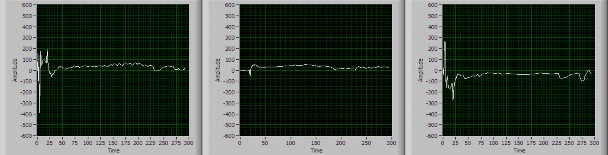
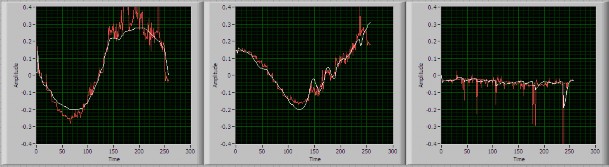
a) Kết quả đo H1x b) Kết quả đo H1y c) Kết quả đo H1z Hình 4.20 Kết quả đo VTT khi sử dụng bộ lọc UKF (đơn vị gauss)
(đường màu đỏ là đo trước lọc; màu trắng là sau lọc)
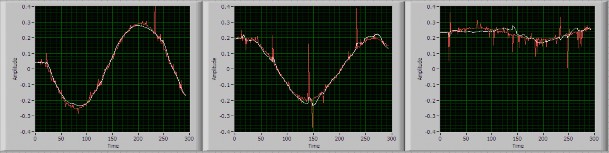
a) Kết quả đo 1x b) Kết quả đo 1y c) Kết quả đo 1z
Hình 4.21 Kết quả đo các thành phần VTG (đơn vị đo 10-2rad/s)
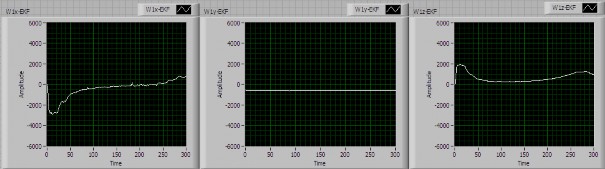
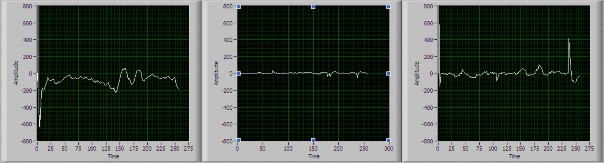
a) Kết quả đo H1x b) Kết quả đo H1y c) Kết quả đo H1z Hình 4.22 Kết quả đo các thành phần VTT có lọc bias (đơn vị đo gauss)
(đường màu đỏ là đo trước lọc; màu trắng là sau lọc)
a) 1x b) 1y c) 1z
Hình 4.23 Kết quả lọc UKF các thành phần VTG (đơn vị đo độ/s) (đường màu đỏ là đo trước lọc; màu trắng là sau lọc)
a) H1X b) H1Y c) H1Z
Hình 4.24 Kết quả lọc MS-AUKF khi không có nhiễu ngoài tác động (đồ thị màu đỏ - trước xử lý; màu trắng – sau lọc)
a) 1X b) 1Y c) 1Z
Hình 4.25 Kết quả lọc MS-AUKF các thành phần VTG (đơn vị đo độ/s)
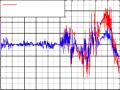
a) H1X b) H1Y c) H1Z Hình 4.26 Kết quả lọc MS-AUKF các thành phần VTT khi nhiễu ngoài tác động
tại thời điểm 130s (đồ thị màu đỏ - trước xử lý; màu trắng – sau lọc)
a) 1X b) 1Y c) 1Z
Hình 4.27 Kết quả lọc MS-AUKF các thành phần VTG có nhiễu ngoài tác động (đơn vị đo độ/s)
Căn cứ những kết quả thực nghiệm có thể đưa ra những đánh giá sau:
1. Sử dụng các bộ lọc EKF, UKF đều có thể giải quyết bài toán xác định các thành phần VTG theo thông tin đo VTT như đã phân tích các kết quả mô phỏng ở cuối chương 2 và trong chương 3. Chất lượng của bộ lọc UKF tốt hơn so với bộ lọc EKF (so sánh tương ứng các kết quả trên hình 4.18a,b,c với 4.20a,b,c và 4.19a,b,c với 4.21a,b,c)..
2. Việc nâng cao chất lượng ước lượng các trạng thái có thể thực hiện được bằng giải pháp đưa thêm sai số bias của cảm biến VTG LY510ALH vào thành phần vector trạng thái trong thuật toán lọc UKF (Hình 4.24a,b,c; 4.25a,b,c).
3. Chất lượng ước lượng các trạng thái cao nhất khi sử dụng bộ lọc MS- AUKF có đưa thêm sai số bias của cảm biến VTG LY510ALH vào thành phần vector trạng thái trong mọi điều kiện có hay không có nhiễu ngoài tác động (Hình 4.24 – 4.27). Tuy nhiên điều này sẽ làm tăng kích thước của bộ lọc do sử dụng cấu trúc thích nghi tham chiếu (MS).
3. Kết quả thực nghiệm cho thấy hoàn toàn có thể sử dụng nguồn thông tin từ trường Trái đất và cảm biến VTG bổ sung để tổng hợp hệ thống ổn định và điều khiển định hướng thiết bị bay không người lái.
4.4.2 Đánh giá về khả năng thực tế hóa bộ đo VTG của TBB
1. Khả năng khai thác vật tư
Vật tư quan trọng nhất để chế tạo bộ cảm biến đo các thành phần VTG theo VTT là hai loại sensores (HMC2003 và LY510ALH) dạng MEMS và Chips vi điều khiển có khả năng biến đổi AD và giải các thuật toán lọc thay cho máy tính số trong thực nghiệm đã trình bày. Những vật tư nêu trên hiện ta có thể khai thác dễ dàng bằng nguồn nhập từ nước ngoài. Ví dụ cụ thể là hai loại cảm biến trong thực nghiệm đã sử dụng có giá thành khá hợp lý (400USD cho HMC-2003; 10USD cho LY510ALH). Thời gian từ khi đặt tới khi nhận hàng trong vòng hai tuần. Bên cạnh những thuận lợi trên, ta còn có thể khai thác được những loại cảm biến mới nhất, tín hiệu đầu ra đã ở dạng số, chất
lượng cao mà giá thành và thời gian cung cấp cao hơn không đáng kể. Dưới đây là bảng 4.1 dẫn chứng về một số loại cảm biến mới có thể khai thác được.
Bảng 4.1 Một số loại cảm biến mới
Vỏ, kích thước | Góc đo | Dải đo | Đầu ra | Nguồn | Sai số | |
Gyroscopes Sensores | ||||||
LY3100ALH | LGA10 3x5x1.1 | Yaw | 1000 độ/s | Analog | 2.7 – 3.6 | 0.015 |
LY3200ALH | LGA10 3x5x1.1 | Yaw | 2000 độ/s | Analog | 2.7 – 3.6 | 0.014 |
L3G3250A | TFLGA 3x5x1.1 | Pitch, Yaw, Roll | 2000 độ/s | Analog | 2.7 – 3.6 | 0.014 |
L3G3250D | LGA16 3x5x1.1 | Pitch, Yaw, Roll | 2000 độ/s | Digital | 2.7 – 3.6 | 0.017 |
L3G4200D | LGA16 4x4x1.1 | Pitch, Yaw, Roll | 2000 độ/s | Digital | 2.7 – 3.6 | 0.017 |
Magnetic Sensores | ||||||
HMC5883L | LCC16 3x3x0.9 | X, Y, Z | 4 gauss | Digital | 2.16 – 3.6 | 0.02 |
HMC6343 | LCC36 9x9x1.9 | X, Y, Z | 2 gauss | Digital | 2.16 – 3.6 | 0.015 |
Có thể bạn quan tâm!
-
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 13
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 13 -
 Thiết Kế Và Tổ Chức Phần Cứng Thực Nghiệm
Thiết Kế Và Tổ Chức Phần Cứng Thực Nghiệm -
 Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm
Thiết Kế Và Xây Dựng Phần Mềm Thực Nghiệm -
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 17
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 17 -
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 18
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 18
Xem toàn bộ 151 trang tài liệu này.
2. Khả năng kỹ thuật và công nghệ
Khả năng kỹ thuật và công nghệ có thể làm chủ trên cơ sở giải quyết hai bài toán sau:
+ Bảo đảm biến đổi ADC đối với tín hiệu analog từ đầu ra các cảm biến;
+ Lọc phi tuyến tối ưu tín hiệu đo VTT và tính toán ra các thành phần VTG của TBB.
Hai bài toán trên hoàn toàn có thể giải quyết trọn vẹn nếu ta lựa chọn một loại chips vi điều khiển thích hợp, đáp ứng những yêu cầu sau:
a) Tốc độ lấy mẫu biến đổi AD;
b) Tổ chức dữ liệu và chương trình xử lý, tính toán (dung lượng bộ nhớ);
c) Đảm bảo yếu tố thời gian thực của các tham số cần đo (thành phần VTG).
Hiện nay có nhiều loại vi điều khiển có thể đồng thời đáp ứng được ba yêu cầu trên, nếu ta tổ chức hệ thống dạng như một máy tính chuyên dụng. Những chips vi điều khiển nằm trong lựa chọn có thể là:
+ Atmel SAM9 ARM926 Microcontrollers (chi tiết xem phụ lục số 4.x1).
+ PIC24F32KA Microcontroller 12-bit ADC (chi tiết xem phụ lục số 4.x2).
+ Họ PIC32MX3XX/4XX, gồm:
PIC32MX320F032H; PIC32MX320F064H; PIC32MX320F128H; PIC32MX340F256H; PIC32MX340F512H;
PIC32MX360F256L và PIC32MX360F512L (chi tiết xem phụ lục số 4.x3).
4.5 Cấu trúc các kênh điều khiển định hướng TBB và phương pháp phối ghép với các bộ đo góc và VTG
Với giả thiết là trong hành trình ổn định về hướng và độ cao có thể coi vận tốc của TBB là đại lượng biết trước và cố định (V=const.). Từ các tham số khí động của TBB đã xác định, theo [1,5,30] ta có các hệ phương trình vi phân mô tả chuyển động quay của TBB trong từng mặt phẳng điều khiển với hệ thống những ký hiệu mặc định:
m – khối lượng TBB, [kg]; V – vận tốc bay, [m/s];
,
- góc nghiêng quỹ đạo [rad] và đạo hàm bậc nhất của nó [rad/s];
, ,- góc gật [rad] và các đạo hàm bậc nhất [rad/s], bậc hai [rad/s2],
Z1 Z
trong đó ,1;
C,C- tương ứng đạo hàm riêng hệ số lực nâng trên cánh và cánh lái;
y
,
,
y
- góc tấn công [rad] và đạo hàm [rad/s] của nó;
- góc trượt [rad] và đạo hàm [rad/s];