Q2dẫn mạnh, nội trở Rđgiảm làm tăng điện áp điểm A (VA= VCC-VRđ), giữ vững tốc độ quay.
Trường hợp tải nhẹ, dòng Imgiảm và mạch điện làm việc ngược với những điều đã được phân tích ở trên.
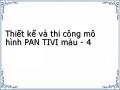
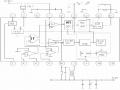
Mạch điện thực của máy Philip như hình 25. Các linh kiện trong mạch gồm như
sau:
- Mạch gồm R1//R2(4,7) để thông dòng động cơ Im, diode D1D2có tác dụng ghim
điện áp. Khi phân cực thuận điện áp A_K luôn duy trì ở mức 0,6V. R3(270) ở emiter lên Q1. Điện trở R4(1,5k), Rv(500), R5(3,9k) là hai nhánh cầu để phân cực base Q1. Chiết áp Rvđể điều chỉnh tốc độ ban đầu của động cơ lúc không tải. Điện trở Rfcó tác dụng thông dòng mồi cho Q1phân nhánh dòng khởi động động cơ cho Q2lúc mở nguồn VCUNG CẤP. Tụ C3(3,3F), R6(1,8k) có tác dụng lọc xung khởi động là lọc nhiễu, R8(1,8k) để phân cực cho Q2. Tụ C1C2(1000pF) để lọc nhiễu do cổ góp của động cơ gây ra. Nguyên lý làm việc như đã phân tích ở phần trên.

Có thể bạn quan tâm!
-
 Thiết kế và thi công mô hình PAN TIVI màu - 4
Thiết kế và thi công mô hình PAN TIVI màu - 4 -
 Thiết kế và thi công mô hình PAN TIVI màu - 5
Thiết kế và thi công mô hình PAN TIVI màu - 5 -
 Thiết kế và thi công mô hình PAN TIVI màu - 6
Thiết kế và thi công mô hình PAN TIVI màu - 6 -
 Thiết kế và thi công mô hình PAN TIVI màu - 8
Thiết kế và thi công mô hình PAN TIVI màu - 8 -
 Thiết kế và thi công mô hình PAN TIVI màu - 9
Thiết kế và thi công mô hình PAN TIVI màu - 9 -
 Thiết kế và thi công mô hình PAN TIVI màu - 10
Thiết kế và thi công mô hình PAN TIVI màu - 10
Xem toàn bộ 88 trang tài liệu này.
Hình 25: Mạch ổn định động cơ trong máy ghi âm hiệu Philip Mạch ổn định động cơ trong máy ghi âm Sango như hình 26.
Cách đấu các linh kiện trong mạch về nguyên tắc giống như hình 25. Chỉ khác ở chỗ dùng 2 điện mồi 220 tụ lọc C1C2thay bằng cuộn cảm L1L2. Có thêm TH để ổn định nhiệt cho base của Q1.

Hình 26: Mạch ổn định động cơ trong máy Sanyo
2. Mạch ổn tốc dùng IC:
Các mạch ổn tốc dùng IC có kích thước nhỏ nên được lắp luôn trong vỏ cùng với
động cơ.
Đã có nhiều lọai vi mạch chuyên dùng từ 4 8 chân ra, được dùng với mức điện
áp nguồn 4,5 12 V để cấp nguồn 3v cho động cơ. Hệ số ổn định K = 50.
Ví dụ hãng SANYO đã chế tạo ra các IC cho động cơ như: LA5511, LA5512 (4 chân): VCC= 3 4,5v; VZ= 1,16v; K=50 LA5521D _M (8 chân): VCC= 3 4,5v; VZ= 0,2v; K=50 LA5536, LA5537 (5 chân): VCC= 6, 9, 12, 15v; VZ= 1,2v.
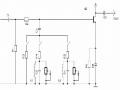
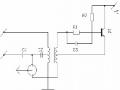
Mạch nguyên lý hình 27:


Hình 27: Mạch ổn tốc động cơ dùng IC LA511
a) Sơ đồ kết cấu.
b) Sơ đồ nguyên lý (VZđiện áp chuẩn, comp, so sánh).
Điện trở R1R2làm phân áp cho mạch điều khiển. RThạn dòng khi khởi động, tụ C
= 2200pF lọc xung nhiễu từ cực góp của động cơ cho mạch so sánh (comp).
Động cơ M: đầu dương (+) đấu với +VCC, đầu âm (-) nối với chân 3 là ngõ ra của IC. Transistor Q2của IC có cực C nối chân 3, cực E nối với chân 2 đưa xuống mass, làm chức năng điều chỉnh điện áp trên hia cực của động cơ, duy trì mức điện áp lúc này cũng ổn định. Mức điện áp phụ thuộc vào động cơ cho trước.
Ở chế độ tĩnh, lúc động cơ có tải (kéo băng), dòng chạy qua động cơ sẽ thay đổi tùy theo tải năng hay nhẹ, và lúc này mạch hiệu chỉnh mới làm việc duy trì điện áp ổn định trên hai cực của động cơ.
Ví dụ: khi động cơ bị năng tải, dòng Imchạy qua động cơ tăng, dòng collector Q2 tăng, làm áp V0ở chân 3 giảm, áp ở điểm phân cực R1R2tăng làm tăng e2 ở đầu đảo của mạch so sánh. Lúc này ngõ ra comp giảm làm cho Q1, Q2dẫn yếu, nội trở Q2tăng làm tăng V0bù lại mức giảm áp ban đầu ổn định áp trên hai cực của động cơ. Còn trường hợp khi tải nhẹ, dòng Imnhỏ Q2dẫn yếu, V0tăng, VA= e2 giảm, làm Q1Q2dẫn mạch khiến V0giảm một lượng bù trừ mức tăng ban đầu để ổn áp cho động cơ.
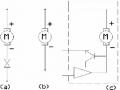
Vi mạch ổn tốc hai động cơ của máy Sharp GE575 có hai hộc băng như hình 28.

Hình 28: Mạch ổn định tốc độ trong máy GE – 575
Vi mạch được đặt chung trong hộp bọc động cơ. Các trị số điện áp trên cực transistor nằm trong ngoặc () chỉ chế độ làm việc ở trạng thái động của mạch.
Dòng động cơ chạy qua colletor – emitter xuống mass. Cực P1và P2để nhận tín hiệu điều khiển làm transistor npn dẫn mạnh hay yếu theo dòng tải của động cơ duy trì tốc độ động cơ luôn ổn định.
Lọai động cơ có cuộn dây phụ để thay tốc độ có 4 đầu dây hay 3 đầu dây (2 đầu nối chung) cũng dùng transistor điều khiển như trong máy Sharp GF9696, GF560, GF800.
3. Mạch ổn tốc kiểu cảm ứng theo nguyên lý Servo (trợ động):
Trong một số máy ghi âm còn dùng mạch ổn tốc gây trợ động. Ở servomotor, khi động cơ quay làm cho nam châm vĩnh cửu sẽ cảm ứng qua cuộn dây 1 sức điện động để đưa qua mạch điều khiển tác động trở lại động cơ.
Khi động cơ quay nhanh sức điện động cảm ứng càng lớn, quay chậm sức điện động cảm ứng càng nhỏ. Nguyên lý điều khiển của mạch đã phân tích ở phần trên.
Lọai mạch này có độ ổn định và có đáp ứng nhanh vì không bị lực quán tính của bánh đà chi phối.
4. Mạch ổn tốc cho động cơ DC lọai đặc biệt:
Trong một số máy ghi âm xách tay chuyên dùng, người ta dùng lọai động cơ 1 chiều có cấu tạo đặc biệt để dùng chung với dòng xoay chiều ở tần số 50 400hz. Rotor có phần ứng là 3 cuộn dâyđ cấp dòng lệch pha 120o, statro phần cảm có thể bằng cuộn dây hay nam châm vĩnh cửu. Có kiểu rotor làm theo kiểu cuộn dây, có lọai làm theo kiểu lồng
sóc. Rotor kiểu lồng sóc không có nhiễu vì không có cổ góp điện sẽ làm giảm tạp âm đánh kể cho máy ghi âm.
Nguyên lý mạch điện của mạch ổn tốc cho lọai động cơ này nói chung là giống nhau. Nó gồm 2 chức năng:
- Ổn định tốc độ động cơ khi có điện nguồn DC biến đổi.
- Ổn định tốc độ động cơ khi tải thay đổi (lực ghì trục động cơ).
Sau đây giới thiệu 2 mạch ổn tốc trong máy UHER-4000 của Đức và trong máy AKAI của Nhật ở hình 29 và 30.
Nguyên lý làm việc của hai dạng mạch này như sau: mạch điện gồm 3 phần
- Cuộn dây phần ứng của rotor 1, 2, 3.
- Ba bộ dao động cùng một tần số, theo kiểu xoay pha 1200hay 1/3 chu kỳ gồm T10, T11, T12, T13, T14, T15và các linh kiện thụ độngtrong mạch RC. Trong đó: T10, T12, T14là tầng đệm, R_C (10k_1F) là mạch xoay pha.
D1, D2, D3: AA118; Dz; 9734 (2F39) T10, T12, T14: AC 151-VII

T11, T13, T15: AC 153-VII T16, T17: BFY39 III (BC 108)
Hình 29: Mạch ổn tốc động cơ DC ba pha trong máy UHER-4000
- Bộ cung cấp nguồn DCv cho động cơ có điều khiển tự động, gồm T16, T17 – D1,D2, D3, DZ, C37và các linh kiện bổ trợ.
a. Ổn định tốc độ động cơ khi điện áp nguồn thay đổi:
Giả sử điện áp nguồn tăng, sẽ tăng điện áp phân cực của cực base T17làm nó dẫn mạnh, điện trở tiếp giáp C-E của T17giảm, làm giảm VCE của nó. Tiếp đó giảm phân cực base T16, T16 dẫn yếu đi, RCE tăng, tăng điện áp sụt qua T16, làm giảm điện áp (-VCC) cấp cho tầng đầu bộ dao động, dòng dao động chạy qua phần ứng yếu, giảm lực đẩy (moment quay) làm động cơ quay chậm lại. Khi điện áp nguồn giảm quá trình sẽ xảy ra ngược lại.
b. Ổn định tốc độ động cơ khi tải thay đổi:
Giả sử lực ghi băng yếu, trục động cơ tải nhẹ, động cơ bắt đầu quay nhanh tăng sức điện động cảm ứng trên cuộn ứng 1, 2, 3, C37(20F) được nạp ½ chu kỳ lần lượt xoay 1200qua D1D2D3để làm thông diode DZ. Lúc này điện áp âm trên C37đặt lên base
T16làm T16dẫn yếu, giảm điện áp (-VCC) cấp cho bộ dao động, dòng dao động chạy qua
1, 2, 3 giảm, làm giảm lực đẩy (moment) làm động cơ quay chậm lại.
Khi trục động cơ quá tải, quá trình sẽ xảy ra ngược lại.
Biến trở R53(5k) điều chỉnh chế độ ban đầu của mạch ổn áp để xác lập dòng tĩnh của động cơ.
Mạch ổn tốc motor trong máy AKAI có tần số dao động khác với máy UHER là do mạch xoay pha 1200của R (10k) và C (1F) mắc ở base Q3, Q5, Q7. Cũng như mạch ổn tốc của UHER nó được bao bởi dòng hồi tiếp dương từ ngõ ra trở về ngõ vào sau khi được xoay pha 3600. Dòng điện làm việc ban đầu cũng được hiệu chỉnh bằng biến trở 5k đặt ở mạch base Q1.

Hình 30: Mạch ổn tốc động cơ 3 pha trong máy AKAI của Nhật
C. BỘ TẠO SÓNG SIÊU ÂM:
Mạch điện của bộ tạo sóng siêu âm tuy đơn giản nhưng hiện tượng vật lý xảy ra trong quá trình xóa từ dư ở băng từ cũng như sử dụng dòng từ biến thiên để sử méo dạng đặc tuyến động của đường từ hóa ở băng từ. Vì vậy cần phải xem xét hiện tượng vật lý trước khi tìm hiểu mạch điện.
I. HIỆN TƯỢNG VẬY LÝ CỦA QUÁ TRÌNH XÓA:
Nhờ việc xóa được từ dư Br ở băng từ nên nó được sử dụng để ghi lại nhiều lần các chương trình khác nhau.
Qúa trình xóa có thể thực hiện bằng 2 cách: là dùng dòng một chiều bão hòa do đầu từ làm bằng nam châm vĩnh cửu có từ xóa đủ mạnh được dùng trong các máy cassette có dải tần âm thanh hẹp, cách thứ hai là dùng dòng siêu âm.
B
Bmax
BR
B
Bmax6
4
2 8
H 1 H
Khe hiệu dụng
0 Mmax
Khe đầu từ
Từ trường ở khe
8 90 10
Chiều băng
3
3
5 7 2
5 4
7 6
tđầu xóa
(a)
9
(a) bằng dòng một chiều
(b) bằng dòng siêu âm
10 8
t
(b)
Hình 31: Hiện tượng vật lý quá trình xóa
Dòng từ biến thiên chạy qua đầu ghi tạo nên từ trường H ở trục hòanh, từ dư Br ở băng nằm trên trục tung B. Xét một đọan băng di chuyển qua đầu xóa theo trục thời gian t. đọan băng đi từ đầu mép khe đầu từ xóa đến giữa khe, từ trường xóa sẽ tăng lên cực đại và giảm dần về 0 khi đến mép khe bên kia. Trong khỏang thời gian đó, dòng siêu âm sẽ đưa mức từ dư Br của băng từ bắt đầu từ điểm 1, 2, 3...10 . Tại điểm 10 từ dư của đọan băng vừa đi qua đầu xóa được đưa về 0, lúc này các vết ghi đã được xóa. Muốn xóa hết các vết ghi tên đọan băng đi qua khe từ thì tần số xóa phải đối chiếu trong khe ít nhất khỏang 10 lần. Trong thực tế, tần số xóa phải chọn cao hơn để cách xa dải tần cao âm thanh từ 30 90khz.
II. ĐẶC TUYẾN THIÊN TỪ:
Trong quá trình từ hóa sẽ sử dụng đường từ trễ để giải thích hiện tượng vật lý, còn trong tính tóan thì phải dùng đặc tuyến động.
Dựa trên đường từ trễ để vẽ đặc tuyến động như hình vẽ sau:
B
- H Hmin
Br Br4
Br3
Br2 Br1
r4
r3
r2
r1 Hmax H
H4 H3 H2 H1
Hình 32: Đặc tuyến thiên từ
Đặc tuyến động cũng mô tả quan hệ giữa điện từ trường H của tín hiệu ở đầu ghi với từ dư Br còn lại ở băng từ. Khi tăng điện trường H từ 0 --> H1thì băng được từ hóa từ 0
--> Br1. Ngắt H1, B1còn lưu trử từ dư ở mức Br1, tiếp tục tăng điện trường H từ H1--> H2thì
Br1--> Br2. Cứ tiếp tục như vậy, rồi kéo các đường song song với H và B ta sẽ có các giao điểm r1, r2, r3, r4. Nối các giao điểm lại với nhau ta sẽ có đặc tuyến động.
Nếu đổi chiều H và tiếp tục như trên ta sẽ có đặc tuyến về phía âm. Đường đặc tuyến động có dạng uốn ở điểm giữa và gây ra méo dạng âm thanh.
2’
1’ 3’ 5’
4’
H X
2
1 3 5
2’
1’ 3’
1 2
4
5’
4’
5
3
4
Hình 33: Ghi với dòng thiên từ siêu âm