Có thể bạn quan tâm!
-

 Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học
Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học -
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản. -
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. -
 Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot.
Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot. -
 Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock.
Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock. -
 Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế.
Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế.
Xem toàn bộ 216 trang tài liệu này.
Cảm biến hồng ngoại | Arduino |
VCC | 5V |
GND | GND |
A0 | A0 |
| ||
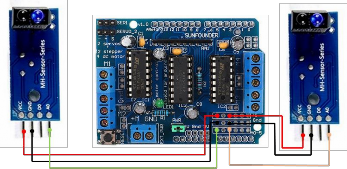
4. | Sơ đồ nối dây 2 cảm biến: |
|
5. | Tiến hành nối dây kết nối cảm biến hồng ngoại với mạch Arduino. Cảm biến bên trái: Cảm biến Arduino hồng ngoại VCC 5V GND GND A0 A2 Cảm biến bên phải: |
|
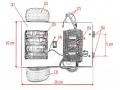
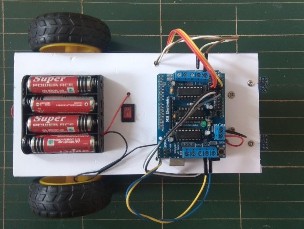
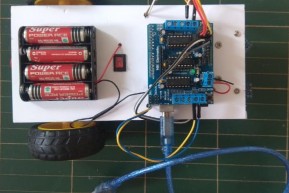
Sau khi nối dây, ta có mô hình xe robot tự dò đường hoàn chỉnh. |
|
Nguyên lí hoạt động của xe robot tự dò đường
Như ta đã ghi nhận dữ liệu cảm biến hồng ngoại từ hoạt động 2.3, ta thấy rằng nếu như cảm biến hồng ngoại đặt ngay mặt phẳng trắng thì dữ liệu ta nhận được là khoảng từ 400 – 600, còn mặt phẳng đen thì dữ liệu ta nhận được là khoảng từ 800 – 900. Vậy ta có thể chọn giá trị trung bình 700 làm điểm mốc, và ta quy ước:
Nếu giá trị cảm biến > 700 → cảm biến ở vạch đen.
Nếu giá trị cảm biến < 700 → cảm biến ở nển trắng.
Ta sẽ thiết kế xe robot dò đường gồm tối thiểu 2 cảm biến hồng ngoại được gắn ở phía trước xe giống như bản thiết kế mẫu. Xe robot sẽ xử lí tự động theo 4 trường hợp sau: Bảng 2.12. Nguyên lí hoạt động sản phẩm
Cách xử lí | |
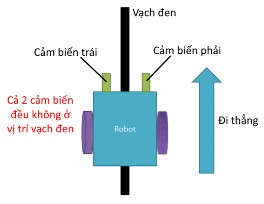
| Ở trường hợp này, ta nhận được giá trị từ cả 2 cảm biến là < 700, tức cả 2 cảm biến đều ở vị trí nền trắng, lúc này ta sẽ cần điều khiển cả 2 motor M3 (trái) và M2 (phải) quay tiến → Xe chạy thẳng. |
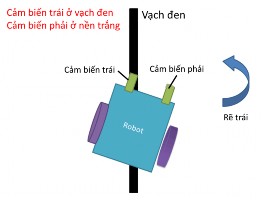
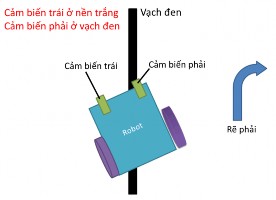
Ở trường hợp này, ta nhận được giá trí từ 2 cảm biến như sau: + Cảm biến trái > 700 → Ở vạch đen. + Cảm biến phải < 700 → Ở nền trắng. → Xe lúc này đang bị đi lệch sang phải Ta sẽ cần điều khiển xe rẽ trái để trở về đúng đường đi vạch đen bằng cách: + Điều khiển motor trái (M3) quay lùi hoặc dừng quay. + Điều khiển motor phải (M2) quay tới. → Xe rẽ trái. | |
| Ở trường hợp này, ta nhận được giá trí từ 2 cảm biến như sau: + Cảm biến trái < 700 → Ở nền trắng + Cảm biến phải > 700 → Ở vạch đen. → Xe lúc này đang bị đi lệch sang trái Ta sẽ cần điều khiển xe rẽ phải để trở về đúng đường đi vạch đen bằng cách: + Điều khiển motor trái (M3) quay tới + Điều khiển motor phải (M2) quay quay lùi hoặc dừng quay. → Xe rẽ phải. |
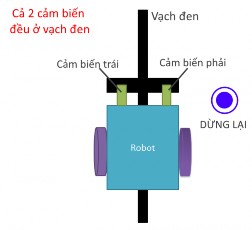
| Ở trường hợp này, ta nhận được giá trị từ cả 2 cảm biến là > 700, tức cả 2 cảm biến đều ở vị trí vạch đen, lúc này ta sẽ cần điều khiển cả 2 motor M3 (trái) và M2 (phải) dừng lại → Xe dừng lại. |
Ta sẽ tiến hành cho Arduino kiểm tra giá trị cảm biến liên tục lặp đi lặp lại và cũng xử lí điều khiển motor liên tục theo từng trường hợp giá trị thu được từ cảm biến.
Lập trình cho sản phẩm chủ đề:
B1. Kết nối mạch Arduino với máy tính thông qua cáp USB.
B2. Mở phần mềm mBlock. Dựa vào nguyên lí hoạt động đã nêu trên, ta sẽ lập trình bằng mBlock cho Arduino theo mẫu Hình 2.7. Sơ đồ khối lập trình mBlock
B3. Nạp (Upload) khối lệnh đã lập trình vào mạch Arduino.
2.5.3. Học liệu trong chủ đề
Dánh sách các học liệu và hướng dẫn sử dụng. Chi tiết nội dung Phiếu học tập có thể xem ở phần Phụ lục.
Bảng 2.13. Danh sách học liệu sử dụng trong chủ đề.
Số lượng | Hướng dẫn sử dụng | |
Phiếu ôn tập kiến thức | 1 phiếu/HS | + Gồm các câu hỏi ôn tập kiến thức. + Mỗi HS có 1 phiếu để tự ôn tập một số kiến thức liên quan trong chủ đề đã học ở môn Khoa học tự nhiên. |
Phiếu học tập số 1 | 1 phiếu/nhóm | + Gồm phần hoạt động nhóm để tìm hiểu cấu tạo của robot. + Mỗi nhóm có 1 phiếu để thảo luận nhóm cho các nhiệm vụ học tập trong Hoạt động 1. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ2.1, GQ2.2, GQ2.3, GQ3.1, GQ3.2. |
Phiếu học tập số 2 | 1 phiếu/nhóm | + Gồm phần trả lời ôn tập kiến thức chủ đề 1. “Nguồn điện, mạch điện và hiệu điện thế” và phần hoạt động nhóm cho Hoạt động 2.1. |
+ Mỗi nhóm có 1 phiếu để trả lời ôn tập kiến thức và thảo luận nhóm đề xuất bản thiết kế xe điện đơn giản trong Hoạt động 2.1. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ3.3, GQ3,4. | ||
Phiếu học tập số 3 | 1 phiếu/HS | + Gồm phần ghi nhận kiến thức tìm hiểu Arduino và mạch điều khiển động cơ L293D dành cho cá nhân HS trong Hoạt động 2.2. + Gồm phần hoạt động nhóm vẽ sơ đồ nối dây giữa Arduino và motor. Cá nhân HS thảo luận theo nhóm và điền vào phiếu của mình. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ3,5. |
Phiếu học tập số 4 | 1 phiếu/HS | + Gồm phần ghi nhận kiến thức tìm hiểu lập trình bằng phần mềm mBlock trong Hoạt động 2.2. + Gồm phần hoạt động nhóm vẽ sơ đồ lập trình. Cá nhân HS thảo luận theo nhóm và điền vào phiếu của mình. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ3,5. |
Phiếu học tập số 5 | 1 phiếu/nhóm | + Gồm phần trả lời ôn tập kiến thức chủ đề 2. “Tốc độ và chuyển động” và phần hoạt động nhóm cho Hoạt động 2.2. + Mỗi nhóm có 1 phiếu để trả lời ôn tập kiến thức và thảo luận nhóm đề xuất phương án đo tốc độ xe và ghi báo cáo. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện GQ3.3, GQ3,5. |
Phiếu học tập số 6 | 1 phiếu/nhóm | + Gồm phần trả lời ôn tập kiến thức chủ đề 3. “Ánh sáng, sự phản xạ ánh sáng” và phần hoạt động nhóm cho Hoạt động 2.3. + Mỗi nhóm có 1 phiếu để trả lời ôn tập kiến thức cũ, ghi nhận kiến thức mới, tìm hiểu về nguyên lí hoạt động cảm biến hồng ngoại. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ3.3, GQ3,6. |
Phiếu học tập số 7 | 1 phiếu/HS; 1 phiếu/nhóm | + Gồm các mục đề xuất cho bản thiết kế sản phẩm. |
+ Mỗi HS đề xuất bản thiết kế theo ý tưởng cá nhân. + Mỗi nhóm HS thống nhất ý tưởng cá nhân điền vào phiếu chung của nhóm + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ4.1, GQ4.2, GQ5.1, GQ5.2 | ||
Phiếu học tập số 8 | 1 phiếu/nhóm | + Gồm các mục đề xuất kế hoạch lắp ráp sản phẩm hoàn thiện theo bản thiết kế. + Mỗi nhóm HS thảo luận đề xuất kế hoạch. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ6.1, GQ6.2. |
Phiếu học tập số 9 | 1 phiếu/nhóm | + Gồm phần báo cáo vận hành thử nghiệm sản phẩm tại nhà của nhóm HS. + Mỗi nhóm HS thảo luận vận hành thử nghiệm sản phẩm và ghi lại kết quả. + GV dựa trên trả lời của HS để đánh giá cho biểu hiện NL GQ7.1, GQ7.2 |
Phiếu đánh giá số 1 | 1 phiếu/nhóm | + GV dùng để đánh giá phần hoạt động của mỗi nhóm HS ở Hoạt động 2.1. + GV dùng kết quả để đánh giá cho biểu hiện GQ3.3, GQ3,4. |
Phiếu đánh giá số 2 | 1 phiếu/nhóm | + GV dùng để đánh giá phần hoạt động của mỗi nhóm HS ở Hoạt động 2.2. + GV dùng kết quả để đánh giá cho biểu hiện NL GQ3.3, GQ3,5. |
Phiếu đánh giá số 3 | 1 phiếu/nhóm | + GV dùng để đánh giá phần hoạt động của mỗi nhóm HS ở Hoạt động 2.3. + GV dùng kết quả để đánh giá cho biểu hiện NL GQ3.3, GQ3,6. |
Phiếu đánh giá số 4 | 1 phiếu/nhóm | + GV dùng để đánh giá bản thiết kế sản phẩm của mỗi nhóm HS. + GV dùng kết quả để đánh giá cho biểu hiện NL GQ5.1, GQ5.2. |
Phiếu đánh giá số 5 | 1 phiếu/nhóm | + GV dùng để đánh giá sản phẩm hoàn thiện của mỗi nhóm HS. + GV dùng kết quả để đánh giá cho biểu hiện NL GQ6.2. |
1 phiếu/nhóm | + GV dùng để đánh giá phần trình bày (bản thiết kế, sản phẩm) của mỗi nhóm HS. | |
Phiếu đánh giá số 7 | 1 phiếu/nhóm | + Nhóm HS dùng để đánh giá bản thiết kế của các nhóm HS khác. |
Phiếu đánh giá số 8 | 1 phiếu/nhóm | + Nhóm HS dùng để đánh giá sản phẩm hoàn thiện của các nhóm HS khác. |
2.5.4. Bộ câu hỏi định hướng
BỘ CÂU HỎI ĐỊNH HƯỚNG SỐ 1
CÂU HỎI TRỌNG TÂM: “Vì sao chúng ta cần phải chế tạo ra những phương tiện như vậy trong cuộc sống hiện đại ngày này?”
Bảng 2.14. Bộ câu hỏi định hướng số 1
CÂU HỎI | CÂU TRẢ LỜI MONG ĐỢI | |
1 | Các xe robot trong video chạy bằng loại nhiên liệu gì? | Xe chạy bằng năng lượng điện. |
2 | So với nhiên liệu xăng hiện nay, nhiên liệu mà xe robot sử dụng có ưu điểm gì hơn? Và ưu điểm này giúp ích cho môi trường sống của chúng ta? | Sử dụng năng lượng điện giúp chúng ta tiết kiệm nhiên liệu, hạn chế việc thải khí CO2 ra môi trường, giúp bảo vệ môi trường, hạn chế hiệu ứng nhà kính, biến đổi khí hậu,... |
3 | Trong video, các xe tự động di chuyển rất có trật tự, nếu áp dụng điều này cho giao thông thì sẽ giúp giải quyết được những vấn nạn giao thông gì? | Có thể giải quyết nạn ùn tắc giao thông, kẹt xe, giảm thiểu tai nạn giao thông. |
4 | Các xe robot di chuyển tự động không cần người lái, vậy việc không cần tài xế sẽ có ích như thế nào cho chúng ta? Chẳng hạn như đối với kinh tế. | Giúp giảm nguồn nhân lực lao động là tài xế, tiết kiệm chi phí thuê nhân công. |
BỘ CÂU HỎI ĐỊNH HƯỚNG SỐ 2
CÂU HỎI TRỌNG TÂM: “Dựa vào sơ đồ các bộ phận của robot đã đề xuất, hãy cho biết những nội dung kiến thức (đã học, chưa học hoặc mong muốn học) nào gắn kết với các bộ phận của xe robot?”
Bảng 2.15. Bộ câu hỏi định hướng số 2.
CÂU HỎI | CÂU TRẢ LỜI MONG ĐỢI | |
1 | Đối với bộ phận động cơ và bánh xe: + Xe chạy bằng nguồn năng lượng điện, dụng cụ nào sẽ giúp chúng ta có được năng lượng này? + Nguồn điện có khả năng cung cấp thứ gì cho các thiết bị điện trong mạch điện? + Trên mỗi cực của nguồn điện có ghi số hiệu gì đặc trưng cho nguồn điện? + Sơ đồ nào cho ta biết được khái quát cách ghép nối giữa các bộ phận, dụng cụ điện? + Để các dụng cụ điện hoạt động bình thường, ta cần quan tâm đến số chỉ nào trên các dụng cụ điện? + Thiết bị điện phổ biến nào sẽ giúp quay bánh xe của xe robot? | + Nguồn điện, ví dụ như pin. + Cung cấp dòng điện. + Hiệu điện thế của nguồn điện. + Sơ đồ mạch điện. + Hiệu điện thế định mức. + Động cơ điện hay motor. |
2 | Đối với Bộ não xử lí Arduino: + Để cho vi mạch Arduino có thể điều khiển xe robot theo theo như yêu cầu ta mong muốn, ta cần phải làm gì? + Giống như bộ não người truyền tín hiệu điều khiển đến cánh tay thông qua dây thần kinh, ta cần phải biết điều gì để giúp kết nối và truyền tín hiệu giữa mạch Arduino và động cơ? + Vi mạch Arduino có thể giúp điều khiển cho động cơ quay làm cho xe robot đi nhanh hay chậm tuỳ ý, vậy đại lượng nào liên quan đến sự nhanh hay chậm của một vật chuyển động? | + Lập trình cho vi điều khiển hoạt động theo ý muốn. + Cách nối dây dẫn giữa Arduino và động cơ. + Tốc độ chuyển động. |
3 | Đối với Cảm biến hồng ngoại: + Cảm biến hồng ngoại có thể phát ra tia sáng hồng ngoại, một vật nếu có thể tự phát ra ánh sáng thì ta gọi vật đó là gì? + Cảm biến hồng ngoại có 2 mắt là mắt phát và thu tia sáng, mắt phát sẽ phát tia sáng đến một bề mặt, tia sáng sẽ bật trở | + Nguồn sáng. + Sự phản xạ ánh sáng. |