o HS ôn tập lại kiến thức đã học về Điện học lớp 7;
o HS thực hành vận dụng kiến thức để lắp ráp xe chạy bằng điện đơn giản.
Bảng 2.20. Tiến trình dạy học Hoạt động 2.1
Hoạt động của GV | Hoạt động của HS | |
Đặt vấn đề. Nhận nhiệm vụ. (5 phút) | GV thông báo, ở buổi học này, HS sẽ được tìm hiểu về bộ phận “thực hiện nhiệm vụ” của robot. Cụ thể là bộ phận giúp xe chuyển động. | HS nhận nhiệm vụ của tiết học. |
GV đặt ra vấn đề: “Cấu tạo cơ bản của xe để giúp xe có khả năng chuyển động gồm những bộ phận đơn giản nào?” | HS liệt kê một số bộ phận cơ bản như: động cơ, bánh xe, khung xe, sàn xe,… | |
GV đặt ra nhiệm vụ: “Hãy đề xuất mô hình xe robot đơn giản chạy bằng điện nhằm đáp ứng được tiêu chí số 1 và số 2 trong bảng tiêu chí đánh giá sản phẩm”. | HS ghi nhận nhiệm vụ. | |
Đề xuất bản thiết kế xe robot đơn giản. (10 phút) | GV yêu cầu HS thảo luận theo nhóm để tiến hành đề xuất phương án thiết kế xe. Bao gồm: + Vật liệu sử dụng. + Bản vẽ mô hình xe. + Sơ đồ mạch điện. GV yêu cầu HS vừa thực hiện nhiệm vụ vừa hoàn thành các nội dung trong Phiếu học | HS thảo luận theo nhóm, thực hiện điền các nội dung ôn tập kiến thức, đề xuất phương án thiết kế xe trong phiếu học tập số 2. |
Có thể bạn quan tâm!
-

 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. -
 Nguyên Lí Hoạt Động Sản Phẩm
Nguyên Lí Hoạt Động Sản Phẩm -
 Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot.
Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot. -
 Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế.
Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế. -
 Hoạt Động 3. Lập Bản Thiết Kế Sản Phẩm
Hoạt Động 3. Lập Bản Thiết Kế Sản Phẩm -
 Hoạt Động 3.2: Báo Cáo Bản Thiết Kế Sản Phẩm
Hoạt Động 3.2: Báo Cáo Bản Thiết Kế Sản Phẩm
Xem toàn bộ 216 trang tài liệu này.
tập số 2, bao gồm phần ôn tập kiến thức Điện học. GV có thể sử dụng Bộ câu hỏi số 3 để hướng dẫn gợi ý HS. | ||
Báo cáo bản thiết kế (5 phút) | GV yêu cầu 1 – 2 nhóm HS trình bày trước lớp về phương án thiết kế xe của nhóm. Các nhóm HS khác đặt câu hỏi, góp ý và phản biện, học tập ưu và nhược điểm về thiết kế từ nhóm bạn. GV góp ý đề xuất chỉnh sửa. | Nhóm HS trình bày phương án thiết kế. Các nhóm khác góp ý nhận xét, học hỏi từ phương án của nhóm bạn. |
Lắp ráp xe. (20 phút) | Dựa vào phương án thiết kế, HS hãy tiến hành lắp ráp xe robot chạy bằng điện đơn giản. | HS làm việc nhóm và lắp ráp xe chạy bằng điện đơn giản theo phương án đã đề xuất. |
Tổng kết – giao nhiệm vụ về nhà (5 phút) | HS tiếp tục hoàn thiện phần xe robot của mình tại nhà. HS tiếp tục ôn tập kiến thức về Chủ đề 2. Tốc độ và chuyển động. | HS nhận nhiệm vụ về nhà. |
2.6.2.2. Hoạt động 2.2: MODULE khám phá 2: Vi điều khiển Arduino và lập trình vi điều khiển mBlock.
Thời lượng: 90 phút
Mô tả:
o HS tìm hiểu về vi xử lí Arduino và mạch điều khiển động cơ L293D;
o HS tìm hiểu về lập trình điều khiển bằng phần mềm mBlock;
o HS thực hành hoạt động đo tốc độ của xe robot ở nhiều mức công suất.
Bảng 2.21. Tiến trình dạy học hoạt động 2.2
Hoạt động của GV | Hoạt động của HS | |
Đặt vấn đề (5 phút) | GV đặt ra vấn đề cho HS: “Chúng ta đã thiết kế chiếc xe robot đơn giản, tuy nhiên xe robot này chỉ có thể chạy tới hoặc lui ở một tốc độ duy nhất. Làm thế nào để chúng ta có thể điều khiển chiếc xe chạy nhanh hay chậm, rẽ trái hay rẽ phải theo ý muốn? | HS tiếp nhận vấn đề của buổi học. |
GV đặt câu hỏi để nhắc lại cho HS: “Trong 3 bộ phận của robot mà các em đã đề xuất ở tiết học 1, các em hãy cho biết, bộ phận nào của robot sẽ đảm nhiệm vai trò điều khiển bánh xe như ở trên?” “Bộ phận này có vai trò như thế nào?” | HS trả lời bộ phận để điều khiển là bộ “não” xử lí, điều khiển. Bộ phận này có vai trò đưa ra các tín hiệu điều khiển để điều khiển các bộ phận khác của robot. | |
GV yêu cầu HS nhắc lại và nhấn mạnh với HS vai trò của bộ não điều khiển: “là trung tâm hoạt động của robot, đây là nơi tiếp nhận thông tin đầu vào từ bộ phận thu nhận tín hiệu. Thông tin sẽ được xử lí và nếu thông tin đầu vào đáp ứng đúng một điều kiện nào đó, bộ não sẽ tiến hành gửi tín hiệu điều khiển đến bộ phận thực hiện nhiệm vụ để thực thi một nhiệm vụ cụ thể phản hồi với thông tin đầu vào. | HS lắng nghe, tiếp thu. |
GV yêu cầu kết nối với robot của HS đang thiết kế, cho biết: 1. Tín hiệu điều khiển ở đây là gì? 2. Bộ phận thực hiện nhiệm vụ ở đây là gì? (Những thông tin này HS đã đề xuất ở hoạt động 1, ở đây cần nhắc lại để nhấn mạnh với HS về nhiệm vụ của buổi học). | HS trả lời các câu hỏi: 1. Tín hiệu điều khiển ở đây là tín hiệu để điều khiển chiều quay của motor để làm quay bánh xe 2. Bộ phận thực hiện nhiệm vụ là động cơ motor + bánh xe. |
GV cũng có thể liên kết với thực tế để HS hiểu được vai trò của bộ não điều khiển robot thông qua ví dụ: Con người chúng ta có bộ não, bộ não này sẽ gửi tín hiệu điều khiển đến các bộ phận của cơ thể (như tay, chân, …) nhằm thực thi một nhiệm vụ mà chúng ta mong muốn như là bước đi, chạy, cầm nắm đồ vật, vẫy tay,… Bộ não robot cũng tương tự như vậy, bộ não robot sẽ gửi tín hiệu điều khiển đến các bộ phận khác nhằm thực thi nhiệm vụ như quay bánh xe để chạy nhanh hay chậm, gắp đồ vật bằng cánh tay,… | HS tiếp thu, lắng nghe ví dụ. |
Từ đó, GV giới thiệu nội dung hoạt động trong tiết học: Tìm hiểu về 2 nội dung chính: 1. Bộ não của xe robot và cách liên kết bộ não với các bộ phận khác. | HS tiếp thu nội dung trong buổi học. |
2. Cách lập trình điều khiển cho bộ não để có thể giúp bộ não gửi tín hiệu điểu khiển đến các bộ phận khác như mong muốn của chúng ta. GV yêu cầu HS vừa lắng nghe các nội dung kiến thức mới vừa ghi chú và hoàn thành câu hỏi trong phiếu học tập số 3 và số 4 (nhiệm vụ 1). | ||
Hoạt động khám phá 2.1.1: Tìm hiểu về “bộ não” robot: Arduino. | ||
Tìm hiểu về mạch vi điều khiển Arduino và mạch L293D (20 phút) | GV giới thiệu cho HS: trong phạm vi chủ đề này, chúng ta sẽ sử dụng vi mạch Arduino như là một bộ não xử lí, điều khiển của robot (đưa xem trực tiếp). Ngoài ra, chúng ta cũng cần điều khiển tốc độ nhanh chậm của motor, vì vậy ta sẽ sử dụng thêm 1 vi mạch hỗ trợ chuyên dụng nữa gọi là vi mạch L293D (đưa xem trực tiếp).
Để sử dụng kết hợp Arduino và mạch L293D, ta sẽ lắp mạch L293D phía trên mạch Arduino như thế này (thực hiện cho HS xem): Như vậy ta sẽ có được bộ não điều khiển hoàn chỉnh cho chiếc xe robot của chúng ta. | HS lắng nghe, tiếp thu, ghi chú lại nội dung kiến thức mới. Sau đó hoàn thành Phiếu học tập số 3 – nhiệm vụ 1. |

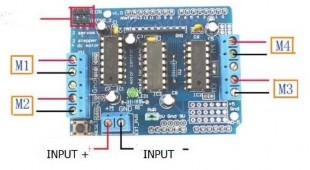
GV hướng dẫn: ta sẽ cần lưu ý các vị trí nối dây trên module L293D như sau: + Cặp cổng kết nối nguồn điện: kí hiệu M+ và GND, dùng để kết nối lần lượt với cực dương (+) và cực âm (-) của nguồn điện. + 4 cặp cổng kết nối motor: kí hiệu M1, M2, M3, M4 có khả năng kết nối với motor, mỗi motor 1 cặp cổng. + Cổng kết nối USB: dùng để kết nối mạch Arduino với máy tính để lập trình điều khiển.
GV lưu ýrằng khi cung cấp nguồn cho Arduino để Arduino hoạt động bình thường thì cần nguồn điện có hiệu điện thế định mức là 5–12V (tức tối thiểu là 5V và tối đa là 12V). | |
GV tiến hành lắp ráp thử 1 motor vào mạch và tiến hành nối với nguồn điện cho HS xem và ghi nhận. | HS theo dõi thao tác của GV. |
GV giao nhiệm vụ cho HS: Dựa vào mô hình xe robot đã thiết kế ở buổi học trước, HS tiếp tục | HS tiến hành hoạt động nhóm và hoàn thành |
thực hiện lắp ráp thêm bộ não Arduino và kết nối bộ não Arduino với các motor bánh xe. GV yêu cầu HS tiến hành thực hiện và vẽ lại sơ đồ kết nối theo như Phiếu học tập số 3 - nhiệm vụ 2. GV kiểm tra hoạt động lắp ráp của HS và hỗ trợ chỉnh sửa. | nhiệm vụ, vẽ sơ đồ vào Phiếu học tập số 3 - nhiệm vụ 2. | |
Hoạt động khám phá 2.1.2: Lập trình điều khiển cho Arduino bằng mBlock. | ||
Tìm hiểu lập trình mBlock cho Arduino. (20 phút) | Sau khi các nhóm HS đã lắp ráp hoàn thiện bộ não Ardino cho xe robot, GV tiếp tục dẫn dắt HS: Để có yêu cầu bộ não Arduino điều khiển các bộ phận khác (ở đây là motor) thực thi nhiệm vụ theo ý muốn của mình. Chúng ta sẽ cần lập trình điều khiển cho nó. Và phần mềm lập trình chúng ta sẽ sử dụng là phần mềm mBlock. Đây là phần mềm lập trình trực quan và đơn giản nhờ các thao tác kéo thả trên màn hình. (GV mở phần mềm và giới thiệu sơ qua về các mục của phần mềm trên màn hình). | HS lắng nghe, tiếp thu. |
GV: (Vừa mở phần mềm vừa thực hiện thao tác) Đầu tiên chúng ta cần phải khởi tạo thiết bị và kết nối với thiết bị. Ở cột Device, ta chọn Add → chọn mạch Arduino Uno. Tiếp theo ta cần kết nối đến thiết bị. Đầu tiên cắm cáp USB với mạch Arduino và với máy tính. Sau đó trên mBlock, ta chọn Connect → Chọn mạch | HS theo dõi thao tác của GV. | |
đã tìm thấy → Chọn Connect. (Nếu không tìm thấy mạch, các em hãy kiểm tra các đầu cắm kết nối). | |
GV: Để lập trình Arduino, khối lệnh đầu tiên chúng ta cần có là khối lệnh: chọn tab Events → chọn khối lệnh “When Arduino Uno starts up” và kéo thả vào khung giữa màn hình. Khối lệnh này có nhiệm vụ khởi động chương trình trên Arduino.
Để điều khiển một động cơ bất kì. Ví dụ ta cần điều khiển motor kết nối với cổng M1 tiến vế phía trước. Ta sẽ kéo khối lệnh:
Trong đó, thông số motor là tên cổng motor kết nối với motor (M1, M2, M3, M4), thông số power là mức công suất của motor. Có giá trị từ 0%–100% Tương tự, để điều khiển motor đi lùi về phía sau, ta sẽ cần khối lệnh:
Để dừng motor đang quay, ta dùng khối lệnh:
| HS theo dõi thao tác của GV. Lắng nghe, tiếp thu. Hoàn thiện vào Phiếu học tập số 4 – nhiệm vụ 1. |
