lại tại bề mặt và tới mắt thu. Hiện tượng tia sáng bị bật lại tại bề mặt gọi là gì? + Chúng ta đang quan tâm đến việc phân biệt vạch trắng và đen, tức là ta đang quan tâm đến yếu tố gì của vật? | + Màu sắc của các vật. |
Có thể bạn quan tâm!
-
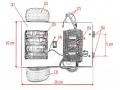
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản. -
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. -
 Nguyên Lí Hoạt Động Sản Phẩm
Nguyên Lí Hoạt Động Sản Phẩm -
 Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock.
Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock. -
 Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế.
Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. Đề Xuất Bản Thiết Kế. -
 Hoạt Động 3. Lập Bản Thiết Kế Sản Phẩm
Hoạt Động 3. Lập Bản Thiết Kế Sản Phẩm
Xem toàn bộ 216 trang tài liệu này.
BỘ CÂU HỎI ĐỊNH HƯỚNG SỐ 3
CÂU HỎI TRỌNG TÂM: “Xe chạy bằng điện đơn giản được thiết kế như thế nào?”
Bảng 2.16. Bộ câu hỏi định hướng số 3.
CÂU HỎI | CÂU TRẢ LỜI MONG ĐỢI | |
1 | Hãy kể tên một số bộ phận cơ bản của xe ô tô mà các em gặp trong đời sống? | Khung xe, sàn xe, bánh xe, động cơ, vô lăng, đèn. |
2 | Một chiếc xe cần tối thiểu bao nhiêu bánh xe? | Cần ít nhất 3 bánh xe (2 bánh sau + 1 bánh trước) hoặc 4 bánh xe. |
3 | Bộ phận nào giúp quay bánh xe? | Động cơ của xe. |
4 | Xe của chúng ta sử dụng nguồn năng lượng gì? Để có được nguồn năng lượng này, ta có thể dùng thiết bị gì? | Xe của chúng ta chạy bằng điện, có thể lấy năng lượng điện từ pin. |
5 | Hiệu điện thế định mức của motor hoạt động bình thường là 3-9V, Dựa trên các dụng cụ cung cấp sẵn, chúng ta có thể ghép nguồn pin như thế nào để motor hoạt động tốt? | Có nhiều cách khác nhau như: + Có thể ghép 2 tới 6 viên pin AA 1,5V. + Sử dụng 1 viên pin 9V. + Sử dụng 1 hoặc 2 pin 3,7V. |
6 | Cả 2 motor phải hoạt động cùng độ lớn hiệu điện thế với nguồn điện, vậy ta sẽ gắp mạch điện như thế nào? Nối tiếp hay song song? | Ta sẽ cần mắc song song, vì trong mạch song song thì hiệu điện thế ở 2 nhánh bằng nhau. |
BỘ CÂU HỎI ĐỊNH HƯỚNG SỐ 4
CÂU HỎI TRỌNG TÂM: “Làm thế nào để đo tốc độ của xe robot?”
Bảng 2.17. Bộ câu hỏi số 4.
CÂU HỎI | CÂU TRẢ LỜI MONG ĐỢI | |
1 | Mạch Arduino hoạt động tốt ở hiệu điện thế từ 5 – 12V. Vậy các em có | Có nhiều cách khác nhau như: + Có thể ghép 2 tới 6 viên pin AA 1,5V. + Sử dụng 1 viên pin 9V. |
những cách ghép nguồn điện như thế nào? | + Sử dụng 1 hoặc 2 pin 3,7V. | |
2 | Để xác định tốc độ, ta cần phải biết được 2 đại lượng nào? | Quãng đường đi được và thời gian đi hết quãng đường đó. |
3 | Làm thế nào để đo quãng đường? | Có thể dùng thước dây, thước kẻ. |
4 | Làm thế nào để xe có thể chạy chính xác trong khoảng thời gian mong muốn? | Ta có thể lập trình cho xe chạy chính xác trong thời gian mong muốn. |
5 | Sau khi có quãng đường và thời gian đi được, làm thế nào để có được tốc độ. | Lấy quãng đường chia cho thời gian. |
BỘ CÂU HỎI ĐỊNH HƯỚNG SỐ 5
CÂU HỎI TRỌNG TÂM: “Làm thế nào để xe có thể đi theo vạch kẻ đen?”
Bảng 2.18. Bộ câu hỏi định hướng số 5.
CÂU HỎI | CÂU TRẢ LỜI MONG ĐỢI | |
1 | Làm thế nào để có lập trình điều khiển cho xe rẽ trái hay rẽ phải? | Có thể sử dụng 1 trong 2 cách sau: + Điều khiển 1 bên motor quay tiến, bên còn lại quay lùi. + Điều khiển 1 bên motor quay tiến, bên còn lại đứng yên. |
2 | Xe cần phải làm gì khi bị lệch sang trái vạch kẻ đen? | Xe cần ngoặt sang bên phải để trở lại đường vạch kẻ đen. |
3 | Xe cần phải làm gì khi bị lệch sang phải vạch kẻ đen? | Xe cần ngoặt sang bên trái để trở lại đường vạch kẻ đen. |
4 | Vậy xe robot cần có bao nhiêu (mắt) cảm biến hồng ngoại để biết mình đang đi theo vạch kẻ? | Cần tối thiểu 2 mắt cảm biến, một mắt trái để phát hiện khi xe bị lệch sang bên trái vạch kẻ đen, một mắt trái để phát hiện khi xe bị lệch sang bên phải vạch kẻ đen. |
5 | Bố trí vị trí cho các cảm biến hồng ngoại như thế nào để phát hiện và đi theo vạch đen? | Bố trí 2 cảm biến hồng ngoại phía trước xe (một bên trái, một bên phải) để xác định đường đi vạch kẻ đen. |
2.6. Tiến trình tổ chức dạy học chi tiết
2.6.1. Hoạt động 1: Đặt vấn đề. Tìm hiểu tổng quan về robot.
Thời lượng: 45 phút.
Nội dung:
o GV giới thiệu tính huống học tập, đặt ra vấn đề cho HS.
o GV hướng dẫn HS tham gia các hoạt động tìm hiểu cấu tạo và nguyên lí cơ bản của robot.
Bảng 2.19. Tiến trình dạy học Hoạt động 1.
Hoạt động của GV | Hoạt động của HS | |
Đặt vấn đề (8 phút) | GV cho HS xem một đoạn clip trong bộ phim hoạt hình Wall – E (2008). Link: WALL·E - 72 Deegress and Sunny Nội dung clip: Toàn cành về thành phố trong tương lai, nơi mà các phương tiện di chuyển một cách tự động theo các vạch kẻ được vạch sẵn trên đường. | HS xem đoạn clip và trả lời các câu hỏi của GV |
GV nêu câu hỏi: Các phương tiện trong đoạn clip di chuyển tự động hay cần người điều khiển? Các phương tiện trong đoạn clip di chuyển tự động như thế nào? | HS trả lời: + Các phương tiện trong đoạn clip di chuyển tự động. + Các phương tiện này di chuyển tự động theo vạch kẻ đờng có sẵn. |
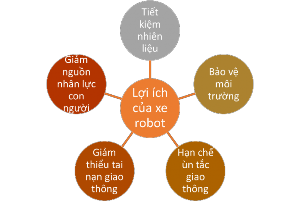
GV sử dụng Bộ câu hỏi số 1 để gợi mở vấn đề trọng tâm cho HS: “Vì sao chúng ta cần phải chế tạo ra những phương tiện như vậy trong cuộc sống hiện đại ngày này?” | HS trả lời các câu hỏi theo sự định hướng của GV. HS được mong đợi liệt kê một số lợi ích của các phương tiện tự động so với phương tiện hiện hành: + Tiết kiệm nhiên liệu. + Hạn chế ô nhiễm môi trường. + Triệt tiêu nạn ùn tắc giao thông + Hạn chế số lượng tai nạn giao thông….. |
GV hỗ trợ HS và diễn giải về những lợi ích của các phương tiện tự động trong tương lai gần đối với con người:
| HS tiếp thu vấn đề của GV. |
GV nêu vấn đề: Làm thế nào các phương tiện có thể di chuyển tự động theo vạch như trong đoạn phim trên? GV trao đổi nhiệm vụ: Trong vai trò là một người kĩ sư tương lại, HS hãy thiết kế xe có khả năng tự động dò đường theo vạch kẻ đen nhằm giúp vận chuyển con người và hàng hoá từ nơi này đến nơi khác mà không cần sự điều khiển từ con người. GV yêu cầu HS trình bày hoặc diễn đạt lại nhiệm vụ chủ đề đã giao. | HS nhận nhiệm vụ học tập. HS trình bày lại nhiệm vụ học tập GV đã giao, có thể diễn đạt thêm bằng ngôn ngữ bản thân để làm rõ vấn đề hơn. | |
Tìm hiểu về cơ sở nguyên lí hoạt động của robot (10 phút) | GV diễn giải ra một số thông tin hoặc yêu cầu HS đọc thông tin khái quát về nguyên lí hoạt động của robot. Robot gồm có 3 bộ phận chính: + Bộ phận thu nhận tín hiệu: dùng đề thu thập, ghi nhận các thông tin từ môi trường bên ngoài thông qua các cảm biến, những thông tin này sẽ được cung cấp cho bộ não xử lí. Bộ phận này xem như là “giác quan” của robot để robot cảm nhận môi trường xung quanh. + Bộ não xử lí, điều khiển: là trung tâm hoạt động của robot, đây là nơi tiếp nhận thông tin đầu vào từ bộ phận thu nhận tín hiệu. Thông tin sẽ được xử lí và nếu thông tin đầu vào đáp ứng đúng một điều kiện nào đó, bộ não sẽ tiến hành gửi tín hiệu điều khiển đến bộ phận thực hiện nhiệm vụ để thực thi một nhiệm vụ cụ thể phản hồi với thông tin đầu vào. + Bộ phận thực hiện nhiệm vụ: là nơi nhận tín hiệu điều khiển từ trung tâm xử lí, bộ phận này sẽ tiến hành thực hiện các thao tác cơ học (như quay bánh xe, cánh tay gắp, chân | HS tiếp thu, có thể theo dõi thêm trong phần phụ lục của Phiếu học tập số 1. |
bước…) theo đúng yêu cầu của bộ não. Đôi khi bộ phận này cũng sẽ gửi các thông tin ngược trở lại bộ não xử lí. Mối quan hệ tương tác giữa các bộ phận sẽ được thể hiện như sơ đồ dưới đây:
| ||
GV giao nhiệm vụ cho các nhóm HS: “Từ sơ đồ mối quan hệ các bộ phân này, các em hãy xác định các thông tin cần thiết cho từng bộ phận để giúp robot của chúng ta hoạt động theo đúng như nhiệm vụ phù hợp với vấn đề ‘Xe tự động đi theo vạch kẻ đường’”. GV yêu cầu HS hoạt động theo nhóm và hoàn thiện vào phiếu học tập số 1 – nhiệm vụ 1. | HS nhận nhiệm vụ, tiến hành thảo luận nhóm, hoàn thiện vào Phiếu học tập số 1 – nhiệm vụ 1. | |
Tìm hiểu bộ phận xe robot (8 phút) | GV tiếp tục giao nhiệm vụ cho HS: “Với các thông tin cần thiết ứng với từng bộ phận của robot đã nêu trên, các em hãy tiến hành chọn ra bộ phận phù hợp nhất tương ứng giúp cho xe robot thực hiện được nhiệm vụ của nó?” GV yêu cầu HS hoạt động theo nhóm và hoàn thành vào Phiếu học tập số 1 – nhiệm vụ 2. | HS nhận nhiệm vụ, tiến hành thảo luận nhóm, hoàn thiện vào Phiếu học tập số 1 – nhiệm vụ 2. |
Dẫn dắt kiến thức | GV yêu cầu HS thảo luận và thực hiện yêu cầu sau: “Dựa vào các bộ phận của robot mà các em đã đề xuất, các em hãy cho biết những nội dung kiến | HS nhận nhiệm vụ, tiến hành thảo luận nhóm, hoàn thiện vào Phiếu |

thức (đã học, chưa học hoặc mong muốn học) nào gắn kết với các bộ phận này?” GV yêu cầu HS thực hiện và tiếp tục điền vào sơ đồ trong Phiếu học tập số 1 – nhiệm vụ 3. GV có thể sử dụng Bộ câu hỏi số 2 đề dẫn dắt và gợi ý cho HS. | học tập số 1 – nhiệm vụ 3. | |
Giới thiệu tiến trình chủ đề và thống nhất tiêu chí đánh giá (7 phút) | Từ những kiến thức liên quan đến robot đã tìm hiểu ở phần trên, GV giới thiệu cho HS về kế hoạch dự án. GV thống nhất cùng HS kế hoạch dự án. – Với HS chưa quen làm dự án, GV thông báo tiến trình và hướng dẫn HS. Đối với HS đã có kinh nghiệm thực hiện dự án, GV yêu cầu HS tự đề xuất các công việc và phân phối thời gian trong dự án. – Tiến trình dự án gồm 7 tiết tại lớp + 3 tuần làm việc ở nhà theo thứ tự: (Xem hình dưới) | HS lắng nghe, tiếp thu nhiệm vụ tiến trình thực hiện dự án. |
Thống nhất tiêu chí đánh giá – GV đặt vấn đề: Làm thế nào để đánh giá sản phẩm học tập là xe robot đi theo vạch kẻ? GV nhấn mạnh cần phải có bảng tiêu chí đánh giá sản phẩm để định hướng cũng như đánh giá công bằng. - GV cho HS tham khảo Phiếu đánh giá số 5 là bảng tiêu chí đánh giá sản phẩm | HS lắng nghe, xem phần bản tiêu chí đánh giá sản phẩm, đặt câu hỏi ở những mục chưa hiểu. HS thống nhất bảng tiêu chí với GV. |
– GV và HS thống nhất các tiêu chí đánh giá và tỉ lệ điểm. | ||
Tổng kết và giao nhiệm vụ (3 phút) | - GV tổng kết và trả lời các thắc mắc của HS. GV giao nhiệm vụ về nhà: HS ôn tập lại các kiến thức đã học theo các nội dung chủ đề sau: Chủ đề 1. Nguồn điện, sơ đồ mạch điện và hiệu điện thế. Chủ đề 2. Tốc độ, chuyển động thẳng đều. Chủ đề 3. Ánh sáng. Sự phản xạ ánh sáng. GV yêu cầu HS sử dụng các câu hỏi trong Phiếu ôn tập kiến thức để ôn tập lại các kiến thức liên quan. | HS nhận nhiệm vụ về nhà. |
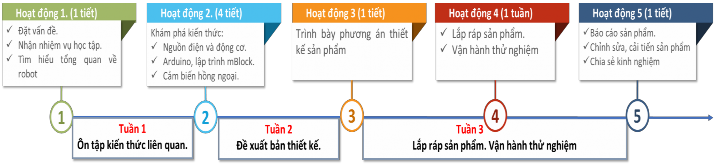
Tiến trình dự án:
Hình 2.11. Sơ đồ thu gọn tiến trình chủ đề
2.6.2. Hoạt động 2: Khám phá kiến thức
2.6.2.1. Hoạt động 2.1: MODULE khám phá 1: Nguồn điện và động cơ.
Thời lượng: 45 phút.
Mô tả: