Có thể bạn quan tâm!
-

 Thiết Kế Chủ Đề Stem “Xe Robot Tự Dò Đường”
Thiết Kế Chủ Đề Stem “Xe Robot Tự Dò Đường” -
 Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học
Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học -
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động Khám Phá 2.1: Lắp Ráp Xe Chạy Bằng Điện Đơn Giản. -
 Nguyên Lí Hoạt Động Sản Phẩm
Nguyên Lí Hoạt Động Sản Phẩm -
 Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot.
Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot. -
 Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock.
Hoạt Động 2.2: Module Khám Phá 2: Vi Điều Khiển Arduino Và Lập Trình Vi Điều Khiển Mblock.
Xem toàn bộ 216 trang tài liệu này.
| ||
5. | Nối dây từ nguồn pin với mạch Arduino + L293D. Chú ý: Cần nối dây đúng thứ tự: NguồnArduinopin+ L293D Dây đỏ M+ cực (+) Dây GND đen cực (-) *** Không nên thực hiện ngược lại vì có thể gây hỏng mạch. Sử dụng tua vít để cố định đầu dây nối. |
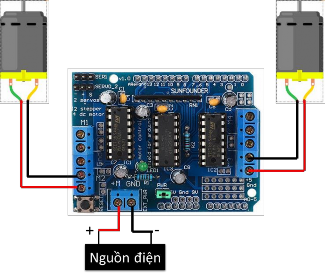
Nối dây từ 2 motor đến mạch Arduino+L293D ở vị trí M2 (motor trái), M3 (motor phải). Sử dụng tua vít để cố định đầu dây nối. Lưu ý các cách nối dây ở trên chỉ là tham khảo, bạn có thể hoàn toàn nối dây motor theo vị trí tuỳ ý trong 4 đầu nối M1 – M4. | ||
7. | Sau khi nối dây xong ta có được xe robot đã kết nối với vi xử lí hoàn chỉnh. | |
8. | Cắp cáp kết nối USB vào mạch Arduino. Cắm đầu cáp còn lại vào đầu USB của máy tính để chuẩn bị cho phần lập trình. |
+ Lập trình mBlock
Dưới đây là một số khối lệnh tham khảo có thể sử dụng trong Hoạt động dạy học.
+ Khối lệnh có chức năng di chuyển xe về tiến phía trước. Hướng dẫn: sử dụng 2 khối lệnh quay tới 2 motor M2, M3 ở mức công suất 100%.

Hình 2.8. Khối lệnh điều khiển xe chạy thẳng
+ Khối lệnh có chức năng di chuyển xe lùi về phía trước. Hướng dẫn: sử dụng 2 khối lệnh quay lùi 2 motor M2, M3 ở mức công suất 100%.
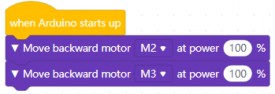
Hình 2.9. Khối lệnh điều khiển xe đi lùi
+ Khối lệnh có chức năng di chuyển xe tiến về trước trong 3s, sau đó lùi về sau trong 3s, lặp lại liên tục quá trình này, mức công suất 50%. Hướng dẫn: sử dụng cặp khối lệnh quay tới motor trong 3s, và cặp khối lệnh quay lùi motor trong 3s, lồng tất cả khối lệnh này trong khối lệnh lặp vô hạn “forever”.
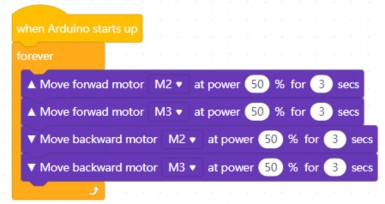
Hình 2.10. Khối lệnh điều khiển xe đi tới 3s, đi lùi 3s.
2.5.2.4. Hướng dẫn thực hiện sản phẩm theo hoạt động 2.3: MODULE khám phá 3: Cảm biến hồng ngoại.
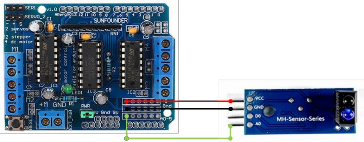
Kết nối cảm biến hồng ngoại và Arduino.
Cảm biến hồng ngoại | Arduino |
VCC | 5V |
GND | GND |
A0 | A0 |
Bảng 2.10. Hướng dẫn lắp ráp sản phẩm trong HĐ2.3
Mô tả thực hiện | Hình minh hoạ | ||
1. | Sơ đồ n cảm biến và mạch A | ối dây giữa hồng ngoại rduino. |
|
2. | Tiến hành nối dây theo sơ đồ nối dây như trên. | ||
Đọc dữ liệu từ cảm biến hồng ngoại sử dụng Microsoft Excel
Để đọc thông tin từ cảm biến truyền đến máy tính, ta sẽ sử dụng tính năng Data Streamer của Microsoft Excel. Data Streamer là tính năng cho phép chúng ta đọc dữ liệu theo thời gian thực từ các bộ vi xử lí điều khiển (Arduino, micro:bit,…) truyền tín hiệu đến máy tính. Ngoài ra Data Streamer còn giúp sơ đồ hoá dữ liệu đọc được thành các đồ thị trực quan.
+ Kích hoạt tính năng Data Streamer:
Đầu tiên, ta cần kích hoạt tính năng này trên Microsoft Excel theo các bước sau: B1. Đảm bảo chúng ta đang sử dụng bản Office 365 mới nhất từ Microsoft.
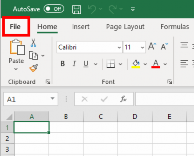
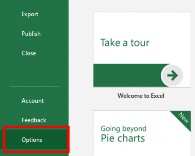
B2. Mở Microsoft Execl. Vào mục File ở hàng thanh công cụ phía trên. Sau đó chọn mục Options.
→
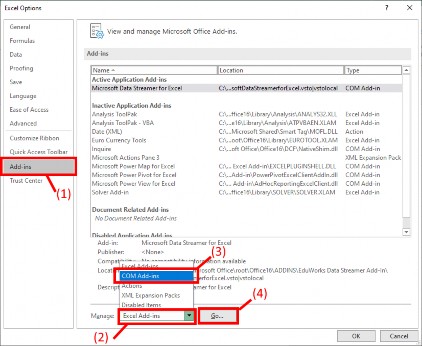
B3. Bảng chọn Excel Options hiện ra. Tiến hành chọn mục Add-ins ở cột trái → chọn
Manage →Chọn COM Add-ins → Chọn GO.
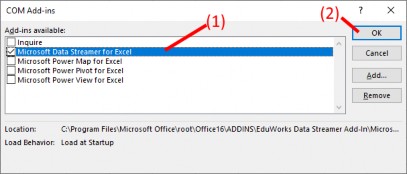
B3. Bảng chọn COM Add-ins hiện ra → Tích chọn Microsoft Data Steamer for Excel
→ Nhấn OK.
B4. Sau khi hoàn thành, chúng ta sẽ thấy có thêm mục chọn Data Streamer ở thanh công cụ phía trên

Lập trình cho Arduino để gửi tín hiệu dữ liệu từ cảm biến hồng ngoại về máy tính B1. Kết nối cáp USB (đã kết nối với Arduino) với máy tính thông qua cổng USB.
B2. Lập trình với các khối lệnh sau đây bằng phần mềm mBlock. Chức năng của khối lệnh này là: đọc dữ liệu từ chân cắm A0 (chân cắm với cảm biến hồng ngoại), lưu dữ liệu vào biến “hong_ngoai”, sau đó truyền dữ liệu về máy tính thông bằng khối lệnh “Write … to serial port”; tất cả các khối lệnh trên sẽ được lặp đi lặp lại nên tục nên sẽ được đặt trong khối “forever”.
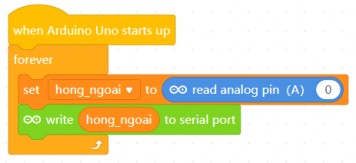
B3. Upload (nạp) khối lệnh đã lập trình vào Arduino. Đọc dữ liệu bằng Data Streamer
B1. Mở nguồn cho mạch Arduino hoạt động, kết nối Arduino với máy tính bằng cổng USB.
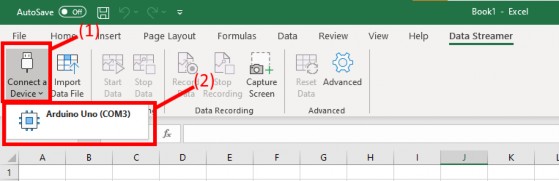
B2. Mở Microsoft Excel, chọn mục Data Streamer ở thanh trên cùng.

B3. Chọn Connect a Device. Chọn thiết bị Arduino Uno đã kết nối.
B4. Sau khi hoàn thành, dữ liệu sẽ được đọc và hiển thị trên màn hình như bên dưới.
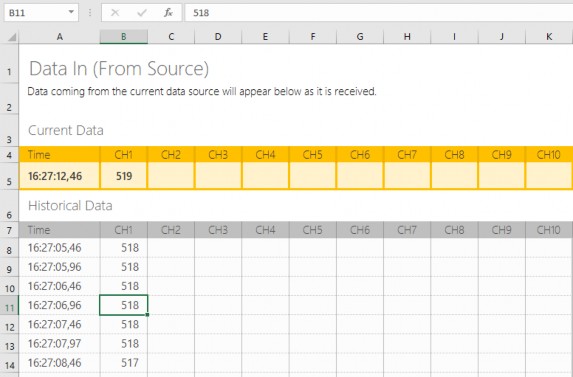
Tiến hành ghi nhận dữ liệu đọc được từ cảm biến.
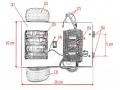
2.5.2.5. Hướng dẫn lắp ráp hoàn thiện sản phẩm chủ đề
Bảng 2.11. Hướng dẫn lắp ráp hoàn thiện sản phẩm
Mô tả thực hiện | Hình minh hoạ | |
1. | Dùng 2 trụ đồng gắn cố định vào 2 cảm biến hồng ngoại, vặn chặt bằng đinh ốc. |
|
2. | Dùng kéo để đục 2 lỗ nhỏ cách nhau 10 cm ở phía đầu của xe robot, nhằm để gắn cố định 2 cảm biến hồng ngoại tại các vị trí này. |
|
3. | Dùng đinh ốc gắn cố định 2 cảm biến hồng ngoại tại 2 vị trí đã đục. Dùng 3 dây nối khác màu cho mỗi cảm biến và nối đầu dây vào các chân cắm của cảm biến hồng ngoại (chỉ nối với chân A0, VCC, GND). |

