2.5.2. Tài liệu hướng dẫn thực hiện sản phẩm
2.5.2.1. Bản thiết kế sản phẩm hoàn thiện
Bản vẽ cấu tạo sản phẩm
Chú thích
Khung xe | (6) | Cảm biến hồng ngoại | |
(2) | Bánh xe | (7) | Các dây điện nối |
(3) | Bộ 4 pin AA ghép 6V | (8) | Bánh xe đa hướng |
(4) | Công tắc khởi động | (9) | Động cơ điện 1 chiều (motor) |
(5) | Mạch Arduino + L293D |
Có thể bạn quan tâm!
-

 Dạy Học Phát Triển Năng Lực Giải Quyết Vấn Đề
Dạy Học Phát Triển Năng Lực Giải Quyết Vấn Đề -
 Thiết Kế Chủ Đề Stem “Xe Robot Tự Dò Đường”
Thiết Kế Chủ Đề Stem “Xe Robot Tự Dò Đường” -
 Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học
Tiến Trình Tổng Thể Các Pha Hoạt Động Của Tiến Trình Dạy Học -
 Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại.
Hướng Dẫn Thực Hiện Sản Phẩm Theo Hoạt Động 2.3: Module Khám Phá 3: Cảm Biến Hồng Ngoại. -
 Nguyên Lí Hoạt Động Sản Phẩm
Nguyên Lí Hoạt Động Sản Phẩm -
 Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot.
Hoạt Động 1: Đặt Vấn Đề. Tìm Hiểu Tổng Quan Về Robot.
Xem toàn bộ 216 trang tài liệu này.
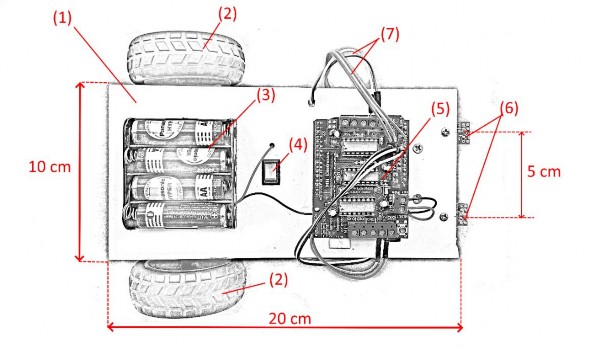
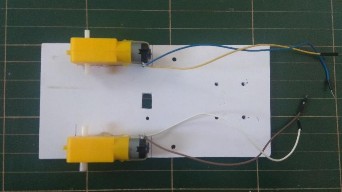
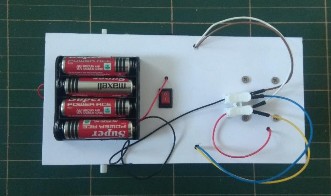
Hình 2.4. Bản vẽ cấu tạo mặt trên xe robot
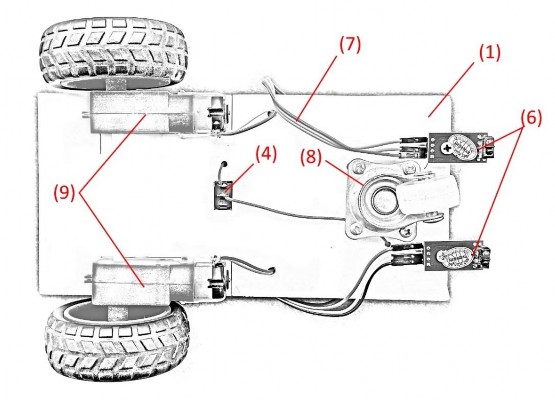
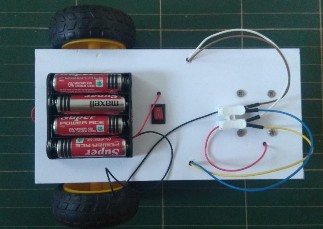
Hình 2.5. Bản vẽ cấu tạo mặt dưới xe robot.
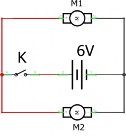
Bản vẽ sơ đồ mạch điện:
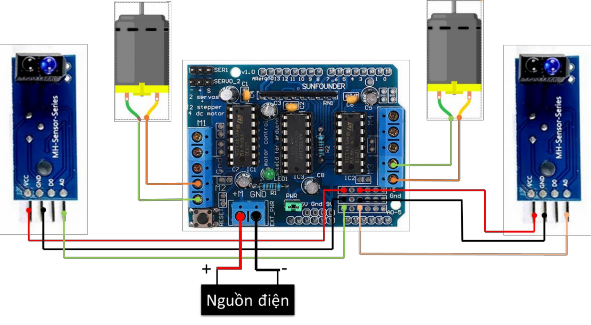
Hình 2.6. Bản vẽ sơ đồ mạch điện
Sơ đồ khối lập trình mBlock:
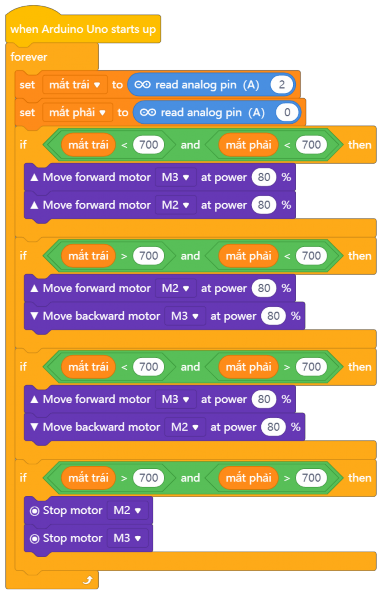
Hình 2.7. Sơ đồ khối lập trình mBlock
2.5.2.2. Hướng dẫn thực hiện sản phẩm theo hoạt động khám phá 2.1: Lắp ráp xe chạy bằng điện đơn giản.
Bảng 2.8. Hướng dẫn lắp ráp sản phẩm trong HĐ2.1.
Mô tả thực hiện | Hình minh hoạ | |
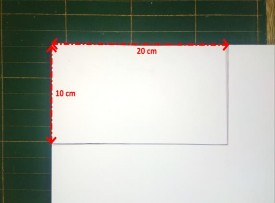
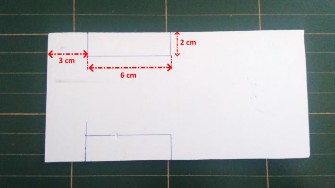
1. | Cắt bìa form theo kích thước như hình để làm cho phần khung xe |
|
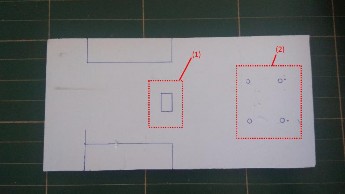
2. | Đánh dấu vị trí nơi sẽ đặt 2 motor. Lưu ý các vị trí nên cân bằng hai bên để xe khi hoạt đông sẽ không bị lệch hướng |
|

Đánh dấu thêm 2 vị trí: + (1) là vị trí để đặt công tắc + (2) là vị trí để cố định bánh xe đa hướng (gồm 4 lỗ nhỏ để vặn cố định bằng ốc vít) |
| |
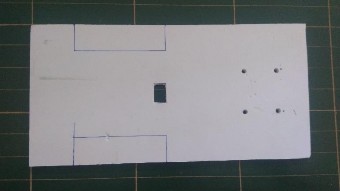
4. | Dùng kéo và dao rọc giấy để đục các lỗ nơi vị trị đã đánh dấu |
|
5. | Đục thêm 1 số lỗ nữa để có thể nối dây điện từ dưới gầm xe đi lên cho các bước sau. |
|
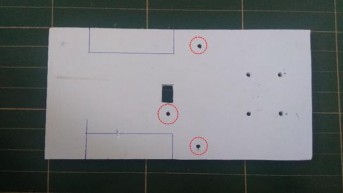
6. | Sử dụng súng bắn keo để dán dính 2 motor vào 2 vị trí motor đã đánh dấu. Lưu ý khi dán, dán mặt ngoài của motor ở ngoài (mặt có đánh dấu chấm tròn). |
|
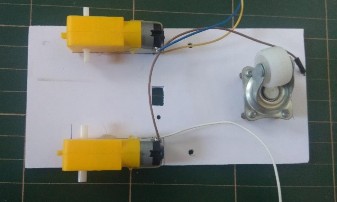
Dùng các trụ nhựa và đinh ốc để cố định bánh xe đa hướng vào khung xe tại 4 lỗ mà ta đã đục trước. |
| |
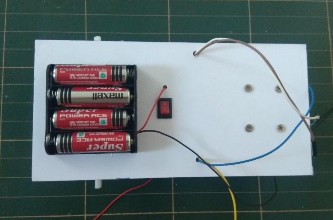
8. | Sử dụng keo 2 mặt để dán hộp đế pin 4AA ở phần trên của khung xe. Gắn thêm 1 công tắc tại vị trí lỗ công tắc đã khoét. |
|
9. | + Luồn dây nối màu đỏ của đế pin xuống dưới gầm xe, cố định vào 1 đầu của công tắc. + Dùng thêm 1 dây đỏ khác để cố định với đầu còn lại của công tắc và nối dây lên phía trên khung xe. |
|
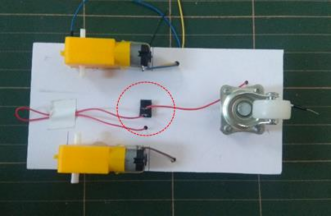
Tiến hành nối dây giữa nguồn pin và 2 motor theo sơ đồ mạch sau:
Có thể sử dụng các cầu đấu dây domino để nối dây 2 motor song song được dễ dàng hơn. |
| |
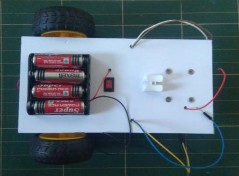
11. | Gắn thêm bánh xe vào 2 motor để được xe hoàn chỉnh. Sau đó, tiến hành bật công tắc, kiểm tra 2 bánh xe có cùng chiều quay hay không. Nếu không, tiến hành đảo dây nối để đồng bộ cùng chiều quay của 2 motor. |
|
2.5.2.3. Hướng dẫn thực hiện sản phẩm theo hoạt động 2.2: MODULE khám phá 2: Arduino và lập trình mBlock
+ Lắp ráp sản phẩm
Bảng 2.9. Hướng dẫn lắp ráp sản phẩm trong HĐ2.2
Mô tả thực hiện | Hình minh hoạ | |
1. | Tháo các dây nối motor với dây nối nguồn điện đã thực hiện ở hoạt động 1. |
|
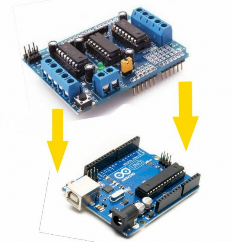
2. | Đặt mạch điều khiển động cơ L293D phía trên mạch Arduino và ghép lại theo đúng vị trí các chân cắm giữa 2 mạch. |
|
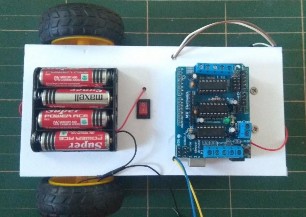
3. | Sử dụng keo 2 mặt hoặc keo nến để cố định mạch Arduino+L293D phía trên khung xe. |
|
4. | Sơ đồ mạch điện ta sẽ kết nối giữa các bộ phận |