PHIẾU HỌC TẬP SỐ 1
TÌM HIỂU CẤU TẠO CỦA ROBOT
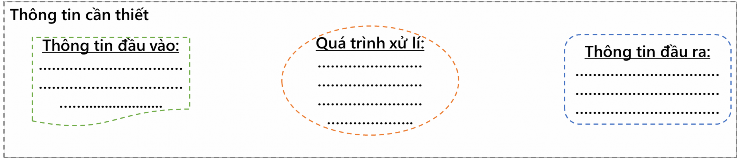
Học sinhlàm việc theo nhóm, tiến hành đọc tài liệu về các bộ phận cơ bản của robot (cuối PHT1) và các thông tin cần thiết của robot theo sự hướng dẫn của GV. Dựa vào nội dung nhiệm vụ chủ đề và thông tin vừa tìm hiểu, hãy xác định: 1. Nhiệm vụ trọng tâm của xe robot của chúng ta. 2. Các thông tin cần thiết cho xe robot của chúng ta hoạt động (gồm thông tin đầu vào, cách xử lí, thông tin đầu ra). Điền các thông tin có được vào phần “Thông tin cần thiết” ở sơ đồ ở dưới, vẽ dấu mũi tên để thể hiện sự tương tác giữa các thông tin cần thiết của xe robot. |
|
Có thể bạn quan tâm!
-

 Một Số Lưu Ý Cho Gv Khi Triển Khai Tổ Chức Dạy Học Chủ Đề
Một Số Lưu Ý Cho Gv Khi Triển Khai Tổ Chức Dạy Học Chủ Đề -
 Kết Quả Khảo Sát Nhận Xét Chung Chủ Đề Stem “Xe Robot Tự Dò Đường”
Kết Quả Khảo Sát Nhận Xét Chung Chủ Đề Stem “Xe Robot Tự Dò Đường” -
 Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 17
Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 17 -
 Quan Sát 2 Hình Sau Và Dựa Vào Kiến Thức Tán Xạ Ánh Sáng Của Các Vật Màu, Hãy Cho Biết, Trường Hợp Nào Mắt Thu Sẽ Thu Được Tia Hồng Ngoại Mạnh Hơn,
Quan Sát 2 Hình Sau Và Dựa Vào Kiến Thức Tán Xạ Ánh Sáng Của Các Vật Màu, Hãy Cho Biết, Trường Hợp Nào Mắt Thu Sẽ Thu Được Tia Hồng Ngoại Mạnh Hơn, -
 Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 20
Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 20 -
 Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 21
Thiết kế chủ đề STEM xe robot tự dò đường nhằm bồi dưỡng năng lực giải quyết vấn đề cho học sinh Trung học cơ sở - 21
Xem toàn bộ 216 trang tài liệu này.
Học sinh làm việc theo nhóm, tiến hành đọc phần thông tin ở cuối phiếu học tập về một số linh kiện của robot có sẵn. Học sinh thảo luận và tiến hành lựa chọn ra các linh kiện phù hợp nhất cho xe robot của chủ đề. Điền các linh kiện vào sơ đồ dưới đây, vẽ dấu mũi tên để thể hiện sự tương tác bộ phận linh kiện. |
|
Học sinh thảo luận nhóm, dựa vào sơ đồ các linh kiện bộ phận của robot và gợi ý của GV. Hãy lựa chọn ra những nội dung kiến thức cần tìm hiểu (đã học, mong muốn học) có sự gắn kết với các bộ phận của xe robot. |
THỜI GIAN: 5 phút |
Nhiệm vụ của xe robot trong chủ đề:
Kiến thức:
Kiến thức:
Kiến thức:
Tìm hiểu thông tin mới:
CẤU TẠO VÀ NGUYÊN LÍ CƠ BẢN CỦA ROBOT
HS tiến hành đọc các thông tin về cấu tạo của robot được cung cấp trong tài liệu học tập.
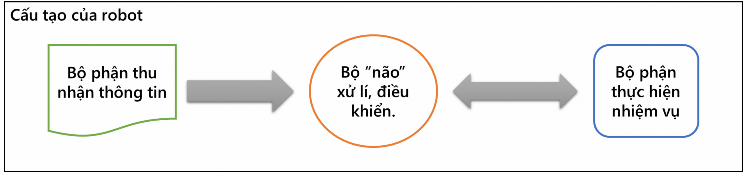
Một robot sẽ gồm 3 bộ phận cơ bản chính:
+ Bộ phận thu nhận thông tin: dùng đề thu thập, ghi nhận các thông tin từ môi trường bên ngoài thông qua các cảm biến, những thông tin này sẽ được cung cấp cho bộ não xử lí. Bộ phận này xem như là “giác quan” của robot để robot cảm nhận môi trường xung quanh.
+ Bộ não xử lí, điều khiển: là trung tâm
Robot HITECH
hoạt động của robot, đây là nơi tiếp nhận
thông tin đầu vào từ bộ phận thu nhận tín hiệu. Thông tin sẽ được xử lí và nếu đáp ứng đúng một điều kiện nào đó, bộ não sẽ tiến hành gửi tín hiệu điều khiển đến bộ phận thực hiện nhiệm vụ để thực thi một hành động cụ thể phản hồi với thông tin đầu vào.
+ Bộ phận thực hiện nhiệm vụ: là nơi nhận tín hiệu điều khiển từ trung tâm xử lí, bộ phận này sẽ tiến hành thực hiện các thao tác cơ học (như quay bánh xe, cánh tay gắp, chân bước…) theo đúng yêu cầu của bộ não. Đôi khi bộ phận này cũng sẽ gửi các thông tin ngược trở lại bộ não xử lí.
Nguyên lí hoạt động cơ bản của robot: Bộ phận thu nhận sẽ ghi nhận thông tin từ bên ngoài môi trường, thông tin này được gửi về bộ “não” xử lí, nếu thông tin này đáp ứng được đúng điều kiện, bộ “não” sẽ tiến hành gửi tín hiệu điều khiển đến bộ phận thực hiện nhiệm vụ để thực hiện hành động theo yêu cầu.
Sơ đồ thể hiện mối liên hệ giữa các bộ phận của robot:

*** Dấu mũi tên thể hiện chiều tương tác từ bộ này đến bộ phận khác.
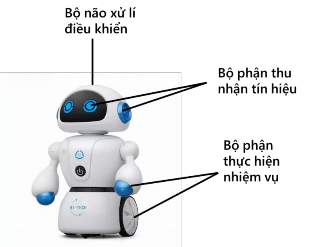
Ví dụ: robot của HITECH như hình trên có cấu tạo gồm:
+ Bộ phận thu nhận tín hiệu. cảm biến gắn ở mắt và tai.
+ Bộ não xử lí, điều khiển: vi xử lí tích hợp bên trong robot.
+ Bộ phận thưc hiện nhiệm vụ: Động cơ + bánh xe, cánh tay.
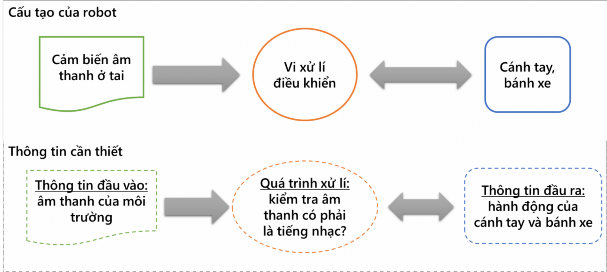
Robot HITECH có nhiệm vụ chính: nhảy theo tiếng nhạc xung quanh. Vậy Robot sẽ có nguyên lí được thể hiện như sau: Cảm biến âm thanh ở tai của robot sẽ thu lại âm thanh của môi trường xung quanh, thông tin này được gửi về bộ não xử lí, bộ não sẽ tiến hành kiểm tra thông tin này xem có phải là âm nhạc hay không, nếu đúng thì bộ não sẽ gửi tín hiệu điều khiển đến bộ phận thực hiện nhiệm vụ là bánh xe và cánh tay để điều khiển các bộ phận này hoạt động theo nhịp điệu của tiếng nhạc. Sơ đồ hoạt động và các thông tin cần thiết của robot:
MỘT SỐ LINH KIỆN VÀ CHỨC NĂNG ĐỂ LẮP RÁP ROBOT
CHỨC NĂNG | |
Cảm biến âm thanh | Cảm biến giúp thu lại âm thanh và độ to âm của môi trường xung quanh. |
Cảm biến ánh sáng | Cảm biến giúp đo cường độ sáng của môi trường. |
Cảm biến hồng ngoại | Cảm biến giúp phân biệt màu sắc đen và trắng của các vật thể |
Cảm biến nhiệt độ | Cảm biến giúp đo nhiệt độ của môi trường xung quanh. |
Cảm biến siêu âm | Cảm biến giúp phát ra sóng siêu âm và đo khoảng cách từ cảm biến đến vật thể. |
Mạch Arduino | Là trung tâm xử lí tín hiệu từ cảm biến và đưa ra tín hiệu mệnh lệnh cho các bộ phận khác. |
Bánh xe + motor | Khi được yêu cầu vận hành, motor quay giúp bánh xe quay nhờ đó xe có thể di chuyển. |
Cánh tay gắp | Giúp gắp các vật thể trên đường theo yêu cầu mệnh lệnh tương ứng. |
Chân bước | Hoạt động bằng cách vận hành các khớp nối để mô phỏng lại bước đi giống chân con người. |
Ăng ten | Giúp nhận và truyền tín hiệu từ bên ngoài. |
Camera | Ghi lại video hình ảnh các vật thể. |
Loa | Phát ra tín hiệu dưới dạng âm thanh như tiếng bíp, tiếng hú,… |
PHIẾU HỌC TẬP SỐ 2
NGUỒN ĐIỆN VÀ ĐỘNG CƠ
ÔN TẬP KIẾN THỨC
1. Nguồn điện là gì?
....................................................................................................................................
2. Nguồn điện có cấu tạo gồm 2 cực là: cực …… và cực …….
3. Kể tên một số nguồn điện đã gặp trong đời sống:
....................................................................................................................................
4. Nguồn điện tạo ra giữa 2 cực của nó một
....................................................................................................................................
5. Số ghi trên các nguồn điện là
....................................................................................................................................
6. Đơn vị của hiệu điện thế là................. Để đo hiệu điện thế ta dùng .........................
7. Hiệu điện thế định mức là
....................................................................................................................................
8. Dòng điện là
....................................................................................................................................
9. Cho biết các bộ sau đây có kí hiệu gì trên sơ đồ mạch điện:
Bóng đèn | |||
Dây dẫn | Vôn kế | ||
Khoá k | Motor điện |
|
10. Động cơ điện một chiều (hay motor) là thiết bị điện giúp biến năng lượng ……… thành năng lượng ………….
11. Thực hiện lắp mạch điện sau:
Hãy cho biết khi ta đảo vị trí dây nối đen và đỏ nối với motor thì chiều quay của motor sẽ như thế nào?
....................................................................................................................................
Học sinh làm việc theo nhóm, thảo luận và đề xuất phương án thiết kế xe chạy bằng điện đơn giản. Phương án thiết kế gồm: 3.6.1.2. Vật liệu sử dụng. 3.6.1.3. Bản thiết kế mô hình xe 3.6.1.4. Sơ đồ mạch điện. Sau đó, học sinh tiếp tục hoạt động theo nhóm và thực hiện lắp ráp xe chạy bằng điện. |
THỜI GIAN: 10 phút (đề xuất) + 20 phút (lắp ráp). |
Đề xuất phương án thiết kế xe chạy bằng điện đơn giản
Nguyên vật liệu sử dụng: | |
Tên vật liệu | Giải thích vai trò |
Sơ đồ mạch điện: | |
PHIẾU HỌC TẬP SỐ 3
TÌM HIỂU ARDUINO VÀ MẠCH L293D
Cá nhân học sinh tiến hành lắng nghe theo sự hướng dẫn của giáo viên và tài liệu học tập, hãy hoàn thành các nội dung kiến thức tìm hiểu về Arduino và mạch L293D dưới đây. |
Cách ghép mạch vi điều khiển Arduino và mạch điều khiển motor L293D:
.......................................................................................................................................
.......................................................................................................................................
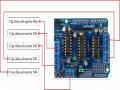
Nối tên các chân của mạch L293D đúng với chân của mạch trên hình vẽ:
Mạch L293D là mạch chuyên dụng dùng để điều khiển động cơ motor, mạch L293D gồm có một số chân nối cần quan tâm sau:
+ 1 cặp chân M+ và GND dùng để kết nối với cực (+) và cực (-) của nguồn điền.
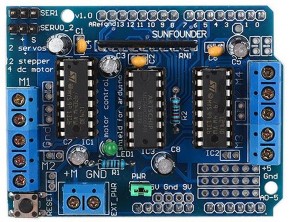
Cặp chân nối nguồn điện
Cặp chân nối motor M1
Cặp chân nối motor M2
+ 4 cặp chân M1, M2, M3, M4 dùng để kết nối với 4 motor khác nhau.
Cặp chân nối motor M3
Cặp chân nối motor M4
Cho biết hiệu điện thế định mức cần cung cấp cho mạch Arduino-L293D để hoạt động là: .....................................................................................................................