vtq – vận tốc tay quay m/s
η – hiệu suất của cơ cấu với tải trọng < 3t η = 0,85 ÷ 0,9
9. Theo tỷ số truyền io đã tính được, chọn loại truyền động và tính bộ truyền động đó. Trong cơ cấu nâng tay quay thường dùng truyền động bánh răng hình trụ để hở hoặc bộ truyền trục vít để hở.
10. Quyết định chỗ đặt phanh, tính mô men phanh, chọn và tính phanh. Nếu dùng tay quay an toàn thì tính tay quay an toàn theo mômen phanh yêu cầu.
1.7.2. Cơ cấu dẫn động bằng điện
Các số liệu cho trước để thiết kế cơ cấu nâng dẫn động bằng điện (hoặc bằng máy nói chung) là:
- Trọng lượng vật nâng (trọng tải) Q (N hay t).
- Chiều cao nâng H (m).
- Vận tốc nâng vn (m/phút)
- Chế độ, điều kiện làm việc của cơ cấu.
Trình tự tính toán cơ cấu nâng dẫn động bằng điện cũng giống như đối với cơ cấu tay quay từ đầu đến phần định mô men trên tang hay đĩa xích Mtg(dx). Phần sau làm khác, trong cơ cấu này vấn đề quan trọng chủ yếu là chọn được động cơ đủ công suất làm việc khi chuyển động ổn định cũng như khi mở máy, đồng thời phải đảm bảo vận tốc nâng cho trước vn.
Công suất yêu cầu đối với động cơ điện là:
Mdc =
Q.vn kw 60.1000.η
Trong công thức này, Q có đơn vị là N còn vn có đơn vị là m/ph.
η = ηm.ηt.ηo – hiệu suất của cơ cấu tính đến các hiệu suất pa lăng, của tang và của bộ truyền.
Theo trị số Ndc tìm được tra bàng mà chọn loại động cơ thích hợp.
Trong ngành máy cần trục ở Liên Xô có loại động cơ điện chuyên dùng là MT và MTK. Đặc điểm các động cơ này là có mô men mở máy cao, phù hợp với điều kiện đóng mở luôn khi làm việc. Trong các bảng tra có cho các đặc tính kỹ thuật của chúng đối với từng chế độ làm việc: nhẹ (TĐ 15%), trung bình (TĐ 25%) và nặng (TĐ 40%). Trong điều kiện không có các loại động cơ trên, có thể dùng tạm các loại động cơ dùng chung (AO,….).
Sau khi chọn động cơ cần xác định tỷ số truyền cần thiết của bộ truyền. Ở đây tỷ số truyền được xác định xuất phát từ quan hệ vận tốc (số vòng quay) của trục thứ nhất (trục động cơ) và trục cuối cùng (trục tang), tức là đảm bảo vận tốc nâng vn cho trước.
Tỷ số truyền của bộ truyền:
io =
ndc
n
tg
Trong đó:
ndc – số vòng quay của trục động cơ. ntg – số vòng quay của tang.
Số vòng quay của tang cần có để đảm bảo vn cho trước là:
ntg =
vn .a π.D
v/ph
o
Với Do là đường kính tang kể đến tâm cáp, m.
Theo tỷ số truyền io và công suất truyền mà thiết kế bộ truyền. Trong điều kiện sản xuất cơ khí quy mô như ở Liên Xô có nhà máy chuyên chế tạo hộp giảm tốc tiêu chuẩn ký hiệu PM, dùng cho ngành máy trục. Thường người ta cố gắng chọn hộp giảm tốc tiêu chuẩn, nếu cần thiết thì phối hợp thêm bằng bộ truyền bánh răng để hở. Nếu phải thiết kế lấy bộ truyền, ta có thể dựa vào các thông số cơ bản của các hộp số PM mà thiết kế cho thích hợp với yêu cầu của mình.
Cuối cùng cần tính mô men phanh, chọn và tính phanh. Chỗ đặt phanh trong cơ cấu dẫn động bằng điện thường là ở trục thứ nhất.
1.7.3. Quá trình mở máy trong cơ cấu nâng
Động cơ điện cơ cấu nâng được chọn theo công suất kkhi chuyển động ổn định với tốc độ nâng không đổi là vn: trong thời kỳ mở máy ngoài việc nâng vật động cơ còn phải tiêu hao năng lượng để tạo gia tốc cho vật nâng và các chi tiết máy trong cơ cấu, vì trước đó chúng ở trạng thái tĩnh. Như vậy, trong thời kỳ mở máy động cơ điện phải tạo ra mômen.
Mm = Mt + Md = Mt + Md2
Trong đó:
Mt – mô men tĩnh để thắng trọng lượng vật nâng.
Md – mô men động để tạo ra gia tốc cho vật nâng chuyển động thẳng (Md1) và tạo gia tốc cho các chi tiết máy chuyển động quay trong cơ cấu (Md2).
Như đã biết mô men trên trục động cơ để thắng trọng lượng vật nâng bằng:
Mt =
Q.Do
2a.io .η
Với η là hiệu suất chung của cơ cấu.
Muốn tính Md1 cần thiết để tạo gia tốc cho vật nâng khi khởi động ta giả thiết rằng chuyển động của nó trong thời kỳ mở máy là nhanh dần đều nghĩa là gia tốc không đổi (thực tế gia tốc có thay đổi).
Trị số gia tốc trung bình của vật nâng trong thời kỳ mở máy phụ thuộc vào vận tốc nâng và thởi gian mở máy tm (thường tm trong khoảng 1 ÷ 5 giây).
Gia tốc vật nâng được tính theo công thức
vn 60.t
m/s2
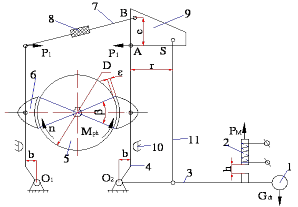
Vậy khi khởi động ta phải thắng một lực phụ thuộc Qp tác dụng ở đầu móc theo chiều lực Q là (hình 1.72):
Q = mj = Q . vn
m
p g 60.t
Tương tự như đối với lực Q, để thắng lực Qp này ta cần có mô men phụ thêm trên trục động cơ là:
Md1 =
Qp .Do
= Q . vn . Do
Với
vn =
2a.io .η g 60.tm
πDontg = πDondc
a a.i
2a.io.η
Vậy:
Md1
o
Q.D .π.D .n Q.D2.n
=o o dc=o dc
o o m o m
g.2a.i .a.i .60.t .η 375a2i2.t .η
ĐC
phanh
§ éng c¬
®iÖn
I
II
III
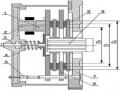
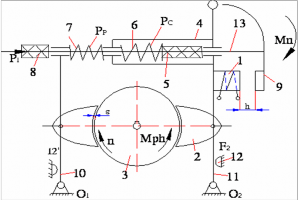
Hình 1.72: Sơ đồ cơ cấu nâng dẫn động bằng điện
Mô men Md2 là mô men động cơ phải phát ra trong thời kỳ mở máy để tạo gia tốc góc cho các chi tiết máy quay trên các trục, nó gồm những mô men động trên tất cả các trục trong cơ cấu chuyển về trục động cơ:
Md2 = M1 + M2/1 + M3/1 + …
Trong đó:
M1 – mô men động cơ phải phát ra (trên trục I) để tạo gia tốc góc cho khối lượng các chi tiết máy trên trục I.
M2/1 – mô men động cơ phải phát ra (trên trục I) để tạo gia tốc góc cho khối lượng các chi tiết máy trên trục II; tương tự như vậy đối với M3/1; và nếu trong cơ cấu còn có trục IV, trục V thì sẽ còn có M4/1, M5/1…
Đối với một tiết máy quay thứ i trên trục I cần mô men M1 để tạo gia tốc góc εi cho nó là:
Mi = Ji. εi
Ji – mô men quán tính khối lượng của chi tiết máy nói trên, tính bằng Nm.s2
G D 2
G D2
J = m ρ2 =i i
=i i
i i i g 2 4g
Ở đây:
ρi, Di – bán kính và đường kính quán tính của chi tiết máy, đo bằng m. Gi - trọng lượng của nó, tính bằng N
Gi.Di2 – gọi là mô men vô lăng của vật, đo bằng N.m2
Trên trục I có nhiều chi tiết máy nên:
M = M = J ε = G D2 εi
1 i i i i i I 4g
Gia tốc góc của trục I trong quá trình khởi động, cũng như trên, ta giả thiết là đều, do đó:
1
ε = ω1
= 2πndc
tm 60tm
2πn
G D2 .n
M = G D2
dc =
i i I dc
1 i i I
60tm 375tm
Tương tự như vậy có thể viết công thức đối với M2 – mô men cần có trên trục II để tạo gia tốc cho các chi tiết máy trên trục II
M = G D2
2πn2
G D2
i i
=II
.ndc
m m 1
2 i i II 60t 375t i
II
Mô men này chuyển về trục động cơ:
i i
M = M2 =
G D2
.ndc
1 1 m 1 1
2/1
i .η 375t i2η
Từ đây ta lại có thể viết tương tự đối với trục III:
i i
G D2
M =
III
.ndc
3/1 375t i i 2ηη
m 1 2 1 2
So sánh thấy các trị số M2/1, M3/1… không đáng kể so với M1 (chúng nhỏ hơn M1 khoảng i12, (i1i2)2… lần), tổng của chúng thường không quá 10 ÷ 15% của M1. Vì
vậy khi cần tính Md2 ta chỉ cần tính một trị số M1 rồi tăng lên 10 ÷ 15% bằng hệ số k = 1,10 ÷ 1,15.
Do đó ta có thể viết:
Md2 = M1 + M2/1 + M3/1 + … = k.M1
kG D2 .n
Md2 =
i i I dc
375t
m
Khi xác định tổng mô men vô lăng của khối lượng các chi tiết máy trên trục I, thường người ta chỉ chú ý các chi tiết máy lớn (có trọng lượng và đường kính lớn), cụ thể là chỉ tính cho rô to động cơ điện, khớp nối trục phanh (hình 1…).
i i I
G D2
(GD2)rô to + (GD2)khớp + (GD2)bánh phanh
Đối với các tiết bị tiêu chuẩn như động cơ điện, nối trục tiêu chuẩn, trị số (GD2) cho trong các bảng.
Đối với các chi tiết máy không tiêu chuẩn, khi cần có thể tự tính lấy mô men vô lăng.
Vậy trong quá trình mở máy, động cơ điện phải phát ra mô men bằng:
Mm = Mt + Md1 + Md2
Q.D Q.D2.n
kG D2 .n
= o +
o dc +
i i I dc
Chú ý: nó như sau:
2a.i .η 375a2i2.t .η 375t
o o m m
1. Trong công thức trên đây cần chú ý đặt các đại lượng đúng đơn vị của Q và Gi – N
Do và Di – m GiDi2 – N.m2 tm – s
Từ đó tính được Mm bằng N.m
2. Đường kính quán tính (Di) và đường kính thông thường (D) khác nhau. Đối với vật trụ tròn (đĩa tròn) có bán kính r thì:
2
Di = 2ρi = r
thì:
Đối với vật là vành tròn, trụ tròn rỗng có bánh kính ngoài r1 và bán kính trong r2
2 r r
2 2
1 2
Di = 2ρi =
Khi biết chính xác thời gian mở máy tm có thể theo công thức trên mà tính ra
mô men mở máy trên trục động cơ.
1.7.4. Quá trình phanh cơ cấu nâng
Quá trình phanh vật đang hạ tương ứng với quá trình mở máy khi nâng. Khi phanh vật đang hậ trên trục phanh cần đặt mô men phanh để thắng trọng lượng vật nâng, thắng quán tính đang chuyển động của nó và của các chi tiết máy quay trong cơ cấu. Nếu trong quá trình mở máy ta phải tạo gia tốc dương (nhanh dần) để chuyển toàn bộ hệ thống từ trạng thái tĩnh sang trạng thái động, thì ngược lại, trong quá trình phanh ta phải tạo gia tốc âm (chậm dần) để chuyển toàn bộ hệ thống từ trạng thái động sang trạng thái đứng yên. Vì vậy có thể viết:
Mph = Mt + Md = Mt + Md1 + Md2
Mômen tĩnh Mt để thắng trọng lượng vật nâng như đã phân tích:
Mt =
QDoη 2ai
o
Md – mômen động cần đặt trên trục phanh để thắng động năng của vật nâng.
Md2 – mô men động cần đặt trên trục phanh để thắng động năng của các chi tiết máy quay trong cơ cấu.
Vì quá trình phanh và mở máy tương tự nhau, các mômen Md đều là cần thiết để tạo gia tốc dương hoặc gia tốc âm nên ta có thể viết ngay:
QD2n η
Md1 =
Md2 =
o 1
o ph
375a2i2t
i i
2
1
kG D2 n 375t
ph
Trong đó:
n1 – số vòng quay của trục I (trục đặt phanh), v/ph; tph – thời gian phanh, s;
η – hiệu suất của cơ cấu.
Trong công thức Md1 ta đặt hiệu suất η lên trên tử số, vì các lực cần trong cơ cấu (thể hiện qua η < 1) giúp thêm trọng trong quá trình phanh, tương tự như đối với Mt.
Vậy mô men phanh cần thiết trong quá trình phanh là:
QD η QD2n η
kG D2 n
M = o o 1
i i 2 1
o o ph ph
ph 2ai 375a2i2t 375t
Chú ý: công thức trên đây là viết cho trường hợp phanh đặt ở trục thứ nhất. Nếu phanh đặt trên trục khác thì phải thay các trị số tương ứng vào chỗ của n1 và io.
1.7.5. Đặc điểm cấu tạo cơ cấu nâng
Sơ đồ nguyên tắc cấu tạo của cơ cấu nâng hoàn chỉnh đã trình bày trên hình 1… Thường dùng hộp giảm tốc bánh răng hình trụ hoặc trục vít, đầu vào nối với trục động cơ điện bằng nối trục vòng đàn hồi hoặc nối trục răng, nửa khớp phía hộp giảm tốc thường làm liền với bánh phanh (hình 1.72).
Cần chú ý rằng, theo quy định về an toàn không thể dùng truyền động trục vít tự hãm thay thế cho phanh, vì sau một thời gian làm việc bị mòn có khả năng sẽ mất tính chất tự hãm. Mặt khác dùng truyền động trục vít tự hãm không lợi vì hiệu suất của nó quá thấp (0,3 ÷ 0,5).
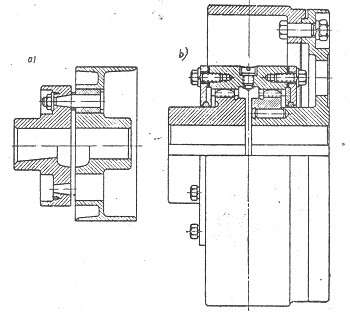
Hình 1.73: Khớp trục làm liền với bánh phanh
a) Nối trục vòng đàn hồi
b) Nối trục răng
CÂU HỎI ÔN TẬP CHƯƠNG 1
Câu 1: Cho sơ đồ cơ cấu nâng sau (hình 1a, b, c,d):
a. Giải thích các ký hiệu Q, S0, Mv, D0, Mp, R, P
b. Hãy thiết lập công thức tính Q theo P và R.
D0 i0 Mp S0 Mv Q R P b) | |||
D0 i0 Mp S0 Mv Q R P c) | D0 i0 Mp S0 Mv Q R P d) |
Có thể bạn quan tâm!
-
 Phanh Má Có Lắp Khớp Ở Má Phanh
Phanh Má Có Lắp Khớp Ở Má Phanh -
 Máy nâng chuyển - 9
Máy nâng chuyển - 9 -
 Phanh Tự Động Giữ Vật Có Mặt Ma Sát Không Tách Rời
Phanh Tự Động Giữ Vật Có Mặt Ma Sát Không Tách Rời -
 Vỏ Kích; 2- Thanh Răng; 3- Mũ Kích; 4- Bàn Nâng Phụ; 5 – Tay Quay; 6- Bộ Truyền Bánh Răng; 7 – Trục Dẫn; 8 – Bánh Răng; 9- Bánh Răng Cóc; 10- Cóc Hãm; 11- Đĩa
Vỏ Kích; 2- Thanh Răng; 3- Mũ Kích; 4- Bàn Nâng Phụ; 5 – Tay Quay; 6- Bộ Truyền Bánh Răng; 7 – Trục Dẫn; 8 – Bánh Răng; 9- Bánh Răng Cóc; 10- Cóc Hãm; 11- Đĩa -
 Bệ Máy; 2- Tang Cuốn Cáp; 3- Hộp Giảm Tốc; 4- Tay Gạt Điều Khiển;
Bệ Máy; 2- Tang Cuốn Cáp; 3- Hộp Giảm Tốc; 4- Tay Gạt Điều Khiển; -
 Các Phương Án Dẫn Động Cơ Cấu Di Chuyển Cầu Trục
Các Phương Án Dẫn Động Cơ Cấu Di Chuyển Cầu Trục
Xem toàn bộ 159 trang tài liệu này.
Hình 1
Câu 2: Cho sơ đồ cấu tạo phanh như hình 2. Hãy nêu nguyên lý hoạt động của phanh.
b) |
Hình 2