Để đơn giản hóa các tính toán mà không làm mất đi tính chất chung, có
thể giả sử thành phần
Hz 0 . Điều đó có nghĩa là trục X của hệ tọa độ Trái
đất ban đầu cũng nằm trong mặt phẳng thẳng đứng chứa vector từ trườngH. Khi đó, vector từ trường H1 mà TBB đo được có dạng sau:
cos.cos.Hx sin .H y
H1 (sin .sin cos.sin .cos).Hx cos.cos.H y
(sin .cos cos.sin .sin ).Hx cos.sin .Hy
Ma trận Jacobi của vector H1
(2.5)
H (, , ) 1 | Hy1 | Hy1 | Hy1 | | ||
(, , ) | | | | | ||
| Hz1 | Hz1 | Hz1 | | ||
| | | | |
Có thể bạn quan tâm!
-
 Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát
Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát -
 Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến
Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến -
 Bản Chất Và Đặc Tính Của Sai Số Khi Đo Từ Trường Trên Thiết Bị Bay
Bản Chất Và Đặc Tính Của Sai Số Khi Đo Từ Trường Trên Thiết Bị Bay -
 Phương Sai Sai Số Tổng Khi Xác Định Các Thành Phần Của Vtg
Phương Sai Sai Số Tổng Khi Xác Định Các Thành Phần Của Vtg -
 Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb
Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb -
 Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb
Các Thuật Toán Lọc Phi Tuyến Khác Trong Tổng Hợp Bộ Đo Vtg Của Tbb
Xem toàn bộ 151 trang tài liệu này.
Hx1 Hx1
Hx1
=
-cos.sin.Hx + +cos.Hy | -cos.sin.Hx | 0 |
-cos.cos.cos.Hx- -sin.cos.Hy | (cos.sin + +sin.sin.cos).Hx | (sin.cos + +cos.sin.sin).Hx - -cos.sin.Hy |
cos.cos.sin.Hx- -sin.sin.Hy | (cos.cos - -sin.sin.sin).Hx | (-sin.sin + +cos.sin.cos).Hx- -cos.cos.Hy |
=
Để tính Jacobi (định thức
DetH1 (,, ) / (,, )), ta biến đổi sang
ma trận tương đương (giá trị định thức không bị thay đổi). Ta nhân hàng thứ 2 của định thức với sin, hàng thứ ba với cos và cộng chúng với nhau. Thay hàng tổng vào hàng thứ hai của định thức. Sau đó làm ngược lại, hàng thứ hai
của định thức ta nhân với cos, hàng thứ ba với sin và thực hiện trừ đi cho nhau. Kết quả ta đặt vào hàng thứ ba của định thức:
DetH1 (,, ) / (,, )
)
(cos.sin .Hx ) ( cos.sin .Hx cos.Hy ) 0
x
(cos.H )
0 (cos.sin .Hx
cos.Hy
(sin .sin .Hx)
( cos cos.Hx sin .Hy )
(sin .Hx )
Bổ sung thêm vào hàng thứ ba (sau khi đã nhân với cos) hàng đầu tiên đã được nhân với sin
DetH1 (,, ) / (,, )
)
( cos.sin .Hx ) ( cos.sin .Hx cos.Hy ) 0
x
(cos.H )
0 (cos.sin .Hx
cos.Hy
0
( cos.Hx )
(cos.sin .Hx )
Khai triển định thức theo hàng đầu tiên, ta có:
DetH1 (,, ) / (,, )
cos.sin .Hx .
0
cos.Hx
cos.sin .Hx cos.Hy
cos.sin .Hx
(cos.Hy
cos.sin .Hx
cos.H
)x
0
cos.sin .Hx cos.Hy 0
cos.sin .H
Định thức bằng 0 của Jacobi
DetH1 (,, ) / (,, )
x
nói lên rằng,
không tồn tại hàm ngược (2.2). Tức là, khi tìm hiểu sự thay đổi của VTT H1,
ta không thể xác định vetor các góc Y1
định vị bộ đo
đơn trị.
(,, )T
một cách
Trục mà khi quay quanh 0 X1
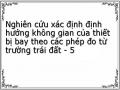
Kết quả nhận được có giá trị rất lớn về mặt phương pháp. Nó cho phép ta không lãng phí thời gian đi tìm thuật toán đo định vị thân TBB khi chỉ dựa trên các phép đo từ trường, mà đi thẳng tới việc tổng hợp
nó, bộ đo vector không cảm biến được
H
Z1
Hình 2.9 Giải thích không có khả năng định vị chỉ bằng các phép đo từ trường
thuật toán sử dụng thông tin bổ sung của những cảm biến khác.
Kết quả nhận được có cách mô tả hình học rất đơn giản và được thể hiện trên hình 2.9. Sự quay của bộ đo VTT quanh trục, mà trục này trùng với VTT, sẽ không làm thay đổi độ lớn các hình chiếu của VTT trên các phần tử của bộ đo. Chính vì vậy ta sẽ có vô số cách định vị bộ đo, khi các hình chiếu của VTT lên các phần tử của bộ đo không thay đổi.
2.4.2 Mô hình đo VTT Trái đất kết hợp với nguồn thông tin độc lập khác để ĐKĐH cho TBB
1. Đặt vấn đề.
Y1
O
Z1
tt
X1
p
H1
Nếu như ta coi vector từ trường
(VTT) Trái đất
H1 trong một không gian
hữu hạn nào đó là xác định và bất biến, thì hoàn toàn có thể lấy nó làm gốc để xét sự quay của TBB. Sự quay của TBB tương đối so với VTT, để thuận tiện trong việc phân tích và xây dựng mô hình toán học, cũng có thể coi là VTT quay trong hệ tọa
Hình 2.10 Sự quay của VTT trong hệ TĐLK
độ liên kết (TĐLK) của TBB với vector VTG là ω (hình 2.10). Dấu “-” ở
đây đặc trưng cho sự ngược pha giữa hai hệ quy chiếu đã nêu. Dựa trên giả thiết đó, ta cần phải xác định: mô hình toán học; những đặc điểm và sai số các phép đo VTG của VTT và TBB. Để chứng minh tính đúng đắn của mô hình đã xây dựng, ta tiến hành khảo sát nó nhờ mô phỏng trên máy tính.
2. Mô hình toán học phép đo VTT trong hệ TĐLK
a. Phương pháp xác định vận tốc góc của vector từ trường
Vector ω
cần đo đặc trưng cho sự quay của VTT
H1 được tách thành
hai vector thành phần: vector tiếp tuyến
ωtt
hướng dọc theo
H1 ; vector
pháp tuyến
ωp
vuông góc với
H1 . Vector tiếp tuyến không làm thay đổi
VTT cần đo trong hệ TĐLK.
Theo định nghĩa về VTG [35,40], khi coi vector H1 là vector bán kính, ta có thể viết:
dH1 / dt ω H1
(2.6)
trong đó vế phải là phép tính nhân vector. Phép nhân vector dưới dạng tọa độ của hệ liên kết trên TBB có thể biểu diễn bằng một định thức:
dH1 dt
i
ω1x
j
ω1y
k
ω1z
(2.7)
H1x
H1y
H1z
Trong đó: i, j, k là các vector đơn vị định hướng tương ứng theo các trục X1, Y1, Z1 của hệ TĐLK.
Khai triển định thức (2.7) theo dòng đầu tiên có thể nhận được hệ các
phương trình đại số tuyến tính đối với các thành phần của vector :
dH1x
.H
.H
dt
1y 1z
1z 1y
dH1y
.H
.H
dt
1x 1z
1z 1x
(2.8)
dH
1z1x .H1y 1y .H1x
dt
Định thức chính của hệ (2.8) có dạng sau và bằng 0 theo chứng minh ở mục 2.4.1:
Det(2.8)
0
H1z
H1y
H1z 0
H1x
H1y
H1x 0 0
Có nghĩa rằng thành phần tiếp tuyến
tt
của vector VTG không có ảnh
hưởng tới đạo hàm của VTT cần đo ( dH1 / dt ) như đã nêu và phép đo vector
dH1 / dt
theo (2.8) có kết quả đa trị.
b. Khắc phục tính đa trị bằng cách bổ sung thông tin vận tốc góc từ các phép đo độc lập
Do hệ phương trình (2.8) không thể giải một cách đơn trị đối với các thành phần vector VTG đo bằng từ trường, nên cần phải bổ sung cho hệ này những thông tin đo VTG độc lập từ loại cảm biến khác. Ta phân tích và lựa chọn nguồn thông tin cần bổ sung như sau:
+ Bổ sung thông tin theo thành phần 1x
Giả sử ta đưa thêm vào thành phần các phép đo (2.8) giá trị đo độc lập của cảm biến VTG 1x, ký hiệu là W. Hệ phương trình (2.8) khi đó sẽ có dạng mới:
dH1x
.H
.H
dt
dH1y
1y
W.H
1z 1z 1y
.H
(2.9)
dt
1z 1z 1x
dH
1zW.H
.H
dt
1y 1y 1x
Bỏ đi phương trình đầu tiên trong hệ (2.9), ta nhận được biểu thức trực tiếp đối với các thành phần vận tốc góc 1y và 1z của TBB mà chưa đo được:
(W.H dH1y ) / H
1z
1z dt 1x
dH
(2.10)
1y (W.H1y 1z ) / H1x
dt
Hệ phương trình (2.10) cho phép ta nhận được tất cả các thành phần VTG còn lại của TBB theo các giá trị đo W của một cảm biến VTG độc lập và bộ đo VTT ba trục. Kết luận trên có ý nghĩa thực tế rất lớn bởi vì nó cho phép xây dựng một bộ cảm biến VTG 3 trục trên cơ sở của một cảm biến từ trường 3 trục và một cảm biến VTG đều dùng công nghệ MEMS [13, 25].
Từ hệ phương trình (2.10) ta thấy là nó chỉ giải được khi
+ Bổ sung thông tin theo thành phần 1y
H1x 0 .
Tương tự như trên, nhờ phép đo độc lập mà ta biết được thành phần VTG 1y. Ký hiệu thành phần này là V, khi đó hệ phương trình (2.8) sẽ có dạng:
dH1x
dt
V.H1z 1z .H1y
dH1y
.H .H
(2.11)
dt
dH1z
1x 1z 1z 1x
dt
1x .H1y V.H1x
Bỏ đi phương trình thứ 2 ở hệ trên, ta nhận được biểu thức trực tiếp cho các thành phần chưa biết của vector vận tốc góc:
1z (V.H1z dH1x ) / H1y
1x (V.H 1x
dt dH1z
dt
) / H1y
(2.12)
Từ hệ phương trình (2.12) ta thấy nó giải được chỉ khi
+ Bổ sung thông tin theo thành phần 1z
H1y 0.
Giả sử do phép đo độc lập ta biết được thành phần VTG 1z. Ký hiệu thành phần đo được là R, khi đó hệ phương trình (2.8) sẽ có dạng:
dH1x
dt
1y .H1z R.H1y
dH1y
dt
1x .H1z R.H1x
(2.13)
dH1z
1x .H1y 1y .H1x
dt
Bỏ đi phương trình thứ 3 của hệ trên, ta nhận được biểu thức trực tiếp cho các thành phần chưa biết của vector vận tốc góc:
1y (R.H1y dH1x ) / H1z
1x (R.H1x
dt dH1y
dt
) / H1z
(2.14)
Từ hệ phương trình (2.14) suy ra là nó giải được chỉ khi có
H1z
0 .
3. Phương án sử dụng duy nhất một cảm biến VTG độc lập là con quay thẳng đứng
Xét các hệ phương trình (2.10), (2.12) và (2.14) ta thấy rằng các hệ này không giải được khi mẫu số của chúng bằng 0, tức là khi các thành phần (H1x, H1y, H1z) của VTT bằng 0. Nếu sử dụng 2 cảm biến VTG độc lập, đặt vuông góc với nhau, thì với định hướng bất kỳ của TBB, ta có khả năng chọn một cặp phương trình để xác định thành phần thứ 3 còn lại của vetor VTG. Tuy nhiên, theo tư duy kinh tế và đơn giản về kỹ thuật, ta chỉ sử dụng duy nhất một cảm biến VTG độc lập để làm nguồn thông tin bổ sung. Ý tưởng đó dẫn tới việc phải chọn vị trí đặt trục nhạy của cảm biến VTG theo một trong 3 trục (X1, Y1, Z1) của hệ TĐLK.
Lựa chọn: Đối với vùng giữa (gần xích đạo) [40] của Trái đất, nơi mà
VTT có thành phần thẳng đứng lớn hơn hẳn các thành phần ngang, tốt nhất nên đặt trục nhạy của cảm biến VTG dọc theo trục OY1 của hệ TĐLK trên TBB. Khả năng thành phần H1y=0 chỉ có thể có khi góc liệng của TBB bằng góc nghiêng của VTT (mà góc nghiêng của VTT là 60o hoặc lớn hơn). Như
vậy TBB sẽ không bao giờ có thể có góc liệng lớn như vậy do hạn chế về quá tải vật bay, góc liệng của TBB không vượt quá 30o.
2.4.3 Phân tích sai số đo các thành phần vận tốc góc của TBB thông qua đo từ trườngg trái đất
1. Nguồn gốc các sai số
Hệ phương trình (2.12), khi đặt cảm biến VTG dọc theo trục đứng OY1 hệ TĐLK của TBB có dạng:
1z (V.H1z dH1x ) / H1y
1x (V.H 1x
dt dH1z
dt
) / H1y
Ở đây V là giá trị đo VTG quay TBB quanh trục OY1 của cảm biến độc lập.
Sai số tính các thành phần vector vận tốc góc 1z và 1x xuất hiện do các sai số của dữ liệu đầu vào: V, H1x, H1y, H1z, kể cả sai số tính đạo hàm (trong
trường hợp ta đang xét chính là các sai số tính
dH1x / dt
và dH1z / dt ). Mặt
khác, các sai số tính đạo hàm lại phụ thuộc vào sai số đo các thành phần H1x và H1z. Ta viết các phương trình (2.12) dưới dạng tổng quát:
1z F(V,dH1x / dt, H1y , H1z )
G(V,dH
/ dt, H , H )
(2.15)
1x
1z 1x 1y
1z
Sai số phép đo các thành phần VTG có thể biểu diễn dưới dạng các phương trình vi phân đầy đủ của các hàm F và G:
1y
1x
1z Fv .V FdH / dt .(dH1x / dt) FH
.H1y FH .H1z
(2.16)
1z
1x Gv .V GdH
/ dt .(dH1z / dt) GH .H1x GH
.H1y
1x
1y
trong đó các chỉ số dưới các hàm F và G có nghĩa là các đạo hàm riêng, ví dụ Fv F/ V . Ta sẽ gọi các đạo hàm riêng là các hệ số ảnh hưởng của phép
đo sơ cấp tới sai số kết quả đo.
Trong bảng 2.3 dưới đây sẽ dẫn ra tất cả các sai số và hệ số có ảnh hưởng tới kết quả đo
Bảng 2.3 Sai số trung bình bình phương tương đối của tạp
Biểu thức của hệ số ảnh hưởng Fkhi tính 1z | Biểu thức của hệ số ảnh hưởng Gkhi tính 1x | |
V - vận tốc góc quanh trục OY1 | Fv=H1z/H1y | Gv=H1x/H1y |
H1x - thành phần VTT dọc theo trục OX1 | FdH1x/dt=1/H1y | GH1x=V/H1y |
H1y - thành phần VTT dọc theo trục OY1 | FH1y=-1z/H1y | GH1y=-1x/H1y |
H1z - thành phần VTT dọc theo trục OZ1 | FH1z=V/H1y | GdH1z/dt=-1/H1y |
2. Phân tích ảnh hưởng và ý nghĩa hình học của các sai số sơ cấp
Từ bảng 2.3 ta thấy tất cả các hệ số ảnh hưởng đều chứa một thừa số