thành phần của VTT, tức là tạo thành bộ vector đo VTT. Để có thể ứng dụng trong tính toán, các kết quả đo, về nguyên tắc, cần phải chuẩn hóa, tức là vector đo được cần phải quy về vector đơn vị.
b) Cảm biến điện từ-trở - AMR (Anisotropic Magneto-Resistive)
Từ trường vô hướng có trong một số vật liệu sắt từ và có thể được tạo thành một dải mỏng để trở thành điện trở mà sau này ta gọi là từ - trở*(AMR). Một số hãng trên thế giới bằng công nghệ tiên tiến đã
nghiên cứu và sản xuất thành công các cảm biến từ-trở bằng các vật liệu
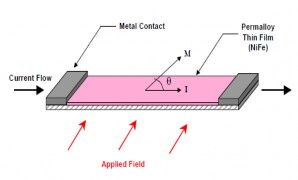
Hình 2.4 Phần tử từ-trở cơ bản.
Permalloy (NiFe) để tạo thành một từ-trở hình 2.4, [19].
Mỗi phần tử từ-trở được chế tạo bằng vật liệu Permalloy trên một tấm mỏng hai đầu của chúng được kết nối với bên ngoài bằng vật liệu mạ kim loại. Đặc điểm của vật liệu này là khi ta cho dòng điện chạy qua tấm fim mỏng đó và đặt chúng trong một môi trường có từ trường thì điện trở trong của chúng bị thay đổi tỉ lệ bình phương với cos. Ở đây góc là góc hợp bởi giữa chiều của dòng điện cháy qua (I) với hướng của
từ trường tác dụng (M).
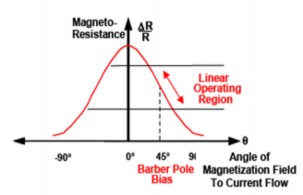
Quan hệ giữa giá trị điện trở trong của từ-trở với hướng vector từ trường được thể hiện trên (hình 2.5).
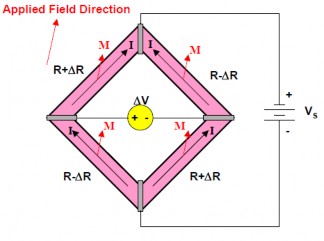
Để tạo ra cảm biến từ các phần tử AMR, người ta sử dụng 4 phần tử
AMR được bố trí dưới dạng hình kim cương với các đầu kết nối với
Hình 2.5 Quan hệ giữa giá trị điện trở so với hướng từ trường.
nhau bằng mạ kim để tạo thành cầu Wheatstone). Các đầu nối trên cùng và dưới cùng của bốn phần tử giống nhau được cấp điện áp một chiều (DC) kích thích trực tiếp dưới dạng nguồn nuôi (Vs), hai đầu nối còn lại dùng để đo. Khi không có từ trường bên ngoài tác động (0 gauss), các điện áp trên các phần tử này có cùng một giá trị, ngoại trừ một điện áp nhỏ do dung sai sản xuất các phần tử AMR. Với các phần tử AMR kết nối theo cách này để tạo thành cầu Wheatstone sẽ tạo ra một điện áp vi sai (ΔV) tỉ lệ với MR và góc ϴ tạo bởi giữa dòng điện chạy trong phần tử từ hóa với hướng của vector từ trường (M). Hình 2.6 mô tả cầu cảm biến Wheatstone.
Trên cơ sở các nguyên lý cảm biến trên, người ta chế tạo ra được các IC cảm biến từ trường theo một, hai hoặc ba trục tự do. Các cảm biến này có thể được sử dụng vào mục đích chỉ thị hướng như các la bàn hoặc kết hợp với các con quay
2 bậc tự do để đo vận tốc góc.
Để đảm bảo cho các cảm biến này có độ nhạy cao nhất trong quá trình đo yêu cầu hướng của từ tính do các vật liệu từ vô hướng tạo ra phải được sắp xếp theo một hướng xác định giống như băng từ catsset trước khi ghi. Thông thường hướng từ tính ban đầu của các cảm biến từ- trở này được thiết lập tại nhà máy
Hình 2.6 Cầu từ trở Wheatstone
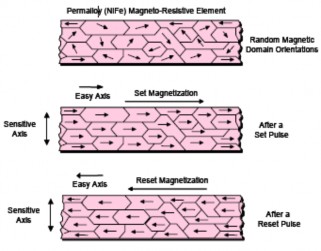
Hình 2.7 Tính năng set/reset của Sensor
sản xuất. Tuy nhiên trong quá trình đo đạc các cảm biến này chịu tác động
của từ trường mạnh bên ngoài vượt quá 10-20 gauss "phá vỡ" giới hạn đo làm giảm độ nhạy của cảm biến. Để đưa miền từ tính về hướng thiết lập ban đầu, hãng HoneyWell đã phát minh ra phương pháp đặt vòng dây khử từ bên trong IC và sử dụng các xung set/reset để khử từ dư và đưa các từ trường vô hướng của các phần tử cảm biến về một hướng xác định đảm bảo cho độ nhạy của cảm biến là cao nhất, điều đó được thể hiện ở hình 2.7.
c) Cảm biến từ trường 3 trục công nghệ cao
Hình 2.8 mô tả hình dạng một loại cảm biến từ trường công nghệ cao ký hiệu HMC2003 có nhiều ứng dụng trong lĩnh vực hàng không [18].
Hình 2.8 Hình dạng bên ngoài của HMC2003
Thông số kỹ thuật
+ Hãng sản xuất Honeywell – USA;
+ 20 chân, dạng DIP rộng (1x0,75inh);
+ Đo chính xác theo 3 trục (3-axis);
+ Tín hiệu đầu ra chuẩn Analog;
+ Dải đo từ 40 micro-gauss đến ± 2 gauss;
+ Điện áp đầu ra tương ứng 1 Volt/gauss; (2.5v tương ứng với 0 gauss)
+ Trên board có điện áp chuẩn (điện áp tham chiếu) 2,5V;
+ Nguồn cung cấp đơn cực dải 6 15VDC;
+ Vật liệu có từ tính rất nhỏ;
+ Nhiệt độ hoạt động trong dải từ -40° đến 85°C
Đặc tính kỹ thuật và sử dụng
Cảm biến từ trường Honeywell HMC2003 (hình 2.8) là loại cảm biến có độ nhạy cao theo 3 trục, được tích hợp từ bộ cảm biến lai. Điểm mạnh của nó là để đo từ trường có giá trị nhỏ. Cảm biến từ-trở (HMC1001 và HMC1002) là loại nhạy nhất của Honeywell được sử dụng để thiết kế HMC2003 đảm bảo
độ tin cậy, độ chính xác của từ kế. Trong IC có nguồn tham chiếu, cho phép chọn hệ số khuếch đại và vùng điện trở bù,làm giảm ảnh hướng của tác động nhiễu loạn không mong muốn. Đầu ra có sử dụng các bộ lọc thông thấp 1kHz cùng với mạch khuếch đại đảm báo các phép đo chính xác khi có nhiễu.
Trong cảm biến HMC2003 sử dụng ba bộ cảm biến permalloy từ-trở (AMR) để đo cường độ và hướng của từ trường theo 3 trục. Cảm biến dạng IC này lý tưởng cho các ứng dụng cần phải đo từ trường theo hai hoặc ba trục. Cảm biến từ trường HMC2003 có thể bị ảnh hưởng bởi các nguồn từ trường mạnh, tạm thời làm tín hiệu đầu ra bị suy giảm. Để loại bỏ hiệu ứng này, và đảm bảo tín hiệu đầu ra nhận giá trị lớn nhất, trong chíp có sử dụng
chế độ set/reset (các chân SR+ và SR-) loại bỏ tác dụng của từ dư.
2.2 Bản chất và đặc tính của sai số khi đo từ trường trên thiết bị bay
Sai số đo VTT có hai loại: sai số cố định (chính xác hơn là sai số tương quan mạnh) và sai số tạp (tương quan yếu) [40].
a) Bản chất của hai loại sai số:
Những sai số cố định (tương quan mạnh) được đặc trưng bởi thành phần cố định của từ trường riêng của TBB, mà từ trường này do các dòng điện trong các mạch thiết bị điện tử trên khoang TBB sinh ra, ảnh hưởng tới phép đo VTT trên TBB.
Sai số tạp (tương quan yếu) được đặc trưng trước hết bởi tạp âm của bản thân bộ đo từ trường, sau đó là bởi thành phần từ trường của các thiết bị và mạch điện tử số trên khoang TBB, khi chúng hoạt động.
b) Đặc tính của hai loại sai số:
Sai số cố định có tính quy luật, phụ thuộc vào cường độ, vị trí và thời điểm làm việc của nguồn từ trường trên khoang TBB. Để loại bỏ sai số cố định ta cần thường xuyên chuẩn lại bộ đo từ trường trên TBB. Loại bỏ sai lệch chỉ số đo nên tiến hành với tất cả các chế độ làm việc của TBB (Ví dụ,
khi có và không có tải trọng, khi mở và đóng động cơ v.v…). Kết quả loại bỏ sai lệch đo cần phải được lưu trữ trong bộ nhớ của máy tính điện tử trên khoang (MTTK) và được sử dụng trong các chương trình xử lý dữ liệu bộ đo từ trường trên khoang.
Các sai số do tạp có đặc tính ngẫu nhiên, không thể tính trước được. Để giảm ảnh hưởng của sai số này, người ta sử dụng các phương pháp tích lũy thông tin và lọc sai số. Một trong những phương pháp có hiệu quả nhất để loại bỏ sai số này là tổng hợp các bộ lọc trên cơ sở các thuật toán lọc phi tuyến tối ưu [44].
2.3 Những khó khăn khi sử dụng từ trường Trái đất để định hướng TBB
2.3.1 Sự thay đổi của từ trường
Từ trường Trái đất thay đổi theo cả thời gian lẫn không gian [19, 39]. Những thay đổi đó mang cả tính quy luật và tính ngẫu nhiên. Những thay đổi ngẫu nhiên sẽ nảy sinh giảm độ chính xác của kết quả đo. Trong một số trường hợp do sự thay đổi từ trường theo thời gian, có lúc ta không thể áp dụng phương pháp định vị đối tượng theo cực từ theo bản đồ từ trường Trái đất đã được xây dựng.
Những thay đổi không gian không thường xuyên của từ trường Trái đất được gọi là thay đổi dị thường, chúng thường có nguyên nhân gây bởi lớp trầm tích chứa quặng từ ở gần bề mặt Trái đất.
Những thay đổi của từ trường theo thời gian được chia thành 2 dạng thường xuyên và không thường xuyên. Người ta gọi những thay đổi thường xuyên là những biến động hoặc di chuyển, chúng được phân thành biến động thế kỷ, biến động theo năm và biến động theo ngày. Biến động thế kỷ có chu kỳ khoảng 1000 năm. Sự thay đổi từ trường Trái đất trong vòng một năm do hậu quả của biến động thế kỷ sẽ được người ta ghi lại trên bản đồ từ trường và được tính tới trong các tính toán như một lượng hiệu chỉnh bổ sung. Những biến động theo năm có chu kỳ một năm và không hề có ảnh hưởng gì tới việc
dẫn đường hay định vị, cũng không có ảnh hưởng gì tới những biến động theo ngày (trừ những vùng địa lý ở tại hay ở sát các cực từ) [24].
Những thay đổi không thường xuyên, không đoán trước được của từ trường Trái đất được gọi là "bão từ". Đoán trước sự định hướng của VTT trong thời gian có "bão từ" là không thể. Thời gian đặc trưng sự thay đổi rõ nét của từ trường Trái đất khi có "bão từ" là khoảng 1 giờ [14].
2.3.2 Ảnh hưởng bởi từ trường do TBB tạo ra
Một ảnh hưởng có hại tới kết quả đo từ trường Trái đất đối với các bộ cảm biến chính là từ trường của chính bản thân TBB sinh ra. Từ trường này tạo bởi các phần tử mang từ tính hoặc có khả năng nhiễm từ do dòng điện trong các mạch điện trên khoang TBB. Sai số của các cảm biến từ do từ trường TBB gây ra được gọi là độ lệch từ.
Trong thực tế đã xác định được rằng, khi bay bằng, độ lệch từ tổng hợp được cấu thành từ các độ lệch từ không đổi, độ lệch từ bán tròn và độ lệch từ phần tư cung tròn [40]:
A B.sin C.cos D.sin 2 E.cos2
(2.1)
Ở đây: - độ lệch từ tổng hợp; A, B, C, D và E – là các hệ số thực nghiệm, tương ứng với độ lệch từ không đổi, độ lệch từ bán tròn và độ lệch từ phần tư cung tròn; - góc hướng từ.
Độ lệch từ thực tế của TBB được đo trong quá trình hiệu chỉnh độ lệch riêng, độ lệch từ sẽ được tính đến để bù khử các kết quả đo từ trường trong quá trình bay. Đó là một thực tế thông thường của các TBB [40].
Cùng với độ lệch từ cơ bản đã được mô tả, tồn tại khi TBB bay bằng, còn tồn tại độ lệch từ liệng, xuất hiện khi thân TBB có góc nghiêng bên hay góc gật so với mặt phẳng ngang của đế ổn định có gắn cảm biến từ. Nguyên nhân xuất hiện độ lệch từ liệng là do sự thay đổi vị trí tương hỗ giữa cảm biến từ và chiều đường sức các mạch từ trên TBB khi nghiêng thân. Độ lệch từ
trên những loại TBB hiện đại không thể loại bỏ được, cách loại bỏ tạm thời chỉ có thể là không sử dụng dữ liệu đo của các cảm biến từ khi TBB cơ động lấy độ cao hay bay vòng tròn trong thời gian dài [40]. Độ lệch từ liệng làm giảm đáng kể độ chính xác xác định tọa độ mục tiêu mặt đất, thực tế thử nghiệm đã chứng minh.
2.3.3 Khó khăn chính của vấn đề định vị thiết bị bay theo từ trường
Khó khăn mang tính nguyên tắc khi định vị theo từ trường Trái đất trong không gian ba chiều là sự không đồng nhất khi xác định hướng tới cực từ Bắc, nếu như không biết trước đường thẳng đứng địa phương (hay đường chân trời). Trong những la bàn từ hiện nay khó khăn đó thể hiện ở sai số quay [41].
Sai số quay rất giống độ lệch từ liệng, nhưng có bản chất hoàn toàn khác. Sai số quay xuất hiện khi nghiêng bản thân la bàn tương đối so với mặt phẳng ngang địa phương. Tình huống này thường xảy ra khi la bàn không đặt trên đế ổn định mà gắn trực tiếp với thân TBB.
Nguyên nhân của sai số quay là do cảm biến từ không chỉ đo thành phần ngang mà còn đo cả thành phần đứng của VTT. Hơn thế, nhiều khi thành phần thẳng đứng lại lớn hơn nhiều lần thành phần ngang, vì vậy mà chỉ số đo của la bàn có thể không phản ánh được thực tế cần phải đo [41].
Khó khăn lớn nhất khi sử dụng các loại vi cảm biến từ trường là tác động thăng giáng của từ trường Trái đất và ảnh hưởng trực tiếp của từ trường tĩnh điện của vật mang (TBB) tới độ chính xác phép đo và dữ liệu đo. Tuy nhiên những khó khăn đó bằng nhiều cách khác nhau ta đều có thể khắc phục được. Khả năng không thể xác định định hướng TBB theo vector từ trường cũng là một khó khăn mang tính nguyên tắc, không khắc phục được nếu chỉ sử dụng các cảm biến từ trường như nguồn thông tin chính để ổn định và điều khiển định hướng không gian cho TBB. Khẳng định này sẽ được chứng minh bằng toán học ở mục tiếp theo. Trong trường hợp có bão từ thì cũng không sử dụng được.Vì vậy hệ thống định hướng sử dụng từ trường chỉ có thể là một hệ bổ
trợ xác định vận tốc góc TBB, nhưng nó cho phép giảm tối đa các bộ cảm biến điện - cơ truyền thống là các con quay nặng nề và đắt tiền.
2.4 Khả năng sử dụng thông tin từ trường Trái đất trong điều khiển định hướng cho thiết bị bay
2.4.1 Tính chất đa trị của định thức Jacobi về khả năng sử dụng đơn thuần thông tin từ trường Trái đất.
Vector ba chiều của phép đo lý tưởng từ trường bằng bộ đo vector, trùng tương ứng với các trục của hệ TĐLK của TBB có thể biểu diễn dưới dạng [40];
H1 A(, , ).H
(2.2)
Ở đây: H1 – vector đo được của từ trường Trái đất H trong hệ TĐLK;
A – ma trận chuyển [40];
, , - các góc định hướng của hệ TĐLK và bộ đo vector so với hệ tọa độ Trái đất (các góc Ơ-le tương ứng gật, hướng và liệng);
H – vector từ trường đã biết trong hệ tọa độ địa tâm.
Phương trình (2.2) là đa trị đối với các góc định vị. Ta hãy xét ma trận chuyển A:
cos.cos | sin | sin.cos |
sin.sin- cos.sin.cos | cos.cos | cos.sin- sin.sin.cos |
sin.cos+ cos.sin.sin | - cos.sin | cos.cos- sin.sin.sin |
Có thể bạn quan tâm!
-
 Thân; 2 – Cánh; 3 – Cánh Liệng; 4 – Cánh Ổn Định; 5 – Cánh Lái Tầm; 6 – Cánh Lái Hướng; 7 – Cánh Ổn Định Hướng.
Thân; 2 – Cánh; 3 – Cánh Liệng; 4 – Cánh Ổn Định; 5 – Cánh Lái Tầm; 6 – Cánh Lái Hướng; 7 – Cánh Ổn Định Hướng. -
 Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát
Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát -
 Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến
Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến -
 Phương Án Sử Dụng Duy Nhất Một Cảm Biến Vtg Độc Lập Là Con Quay Thẳng Đứng
Phương Án Sử Dụng Duy Nhất Một Cảm Biến Vtg Độc Lập Là Con Quay Thẳng Đứng -
 Phương Sai Sai Số Tổng Khi Xác Định Các Thành Phần Của Vtg
Phương Sai Sai Số Tổng Khi Xác Định Các Thành Phần Của Vtg -
 Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb
Thuật Toán Lọc Phi Tuyến Các Thành Phần Vector Vtg Của Tbb
Xem toàn bộ 151 trang tài liệu này.
A(,,)=
Tính thành phần Jacobi của vector H1=A(,,).H
(2.3)
cos.cos.Hx sin .Hy sin .cos.Hz
(sin .sin cos.sin .cos ).Hx cos.cos .Hy
H1
(cos.sin sin .sin .cos ).Hz
(2.4)
(sin .cos cos.sin .sin ).Hx cos.sin .Hy
(cos.cos sin .sin .sin ).Hz