được của mô hình đã xây dựng. Bởi vì nó đã được kiểm chứng bằng hai mức thử nghiệm theo phương pháp mô phỏng và thí nghiệm trên thiết bị thực.
Những thuật toán lọc phi tuyến tối ưu bằng các phương pháp lọc Kalman mở rộng, Kalman thích nghi, với hệ số tĩnh, hệ số động, lọc phi tuyến rời rạc đã được đề xuất, triển khai nghiên cứu trong chương 3 và 4 của luận án, cho thấy sự phong phú về số lượng các phương án, giải pháp khoa học có thể áp dụng, mà còn cho ta sự lựa chọn tối ưu khả năng hiện thực hóa hệ thống đo – xử lý thông tin định hướng thiết bị bay.
2. Về ý nghĩa thực tiễn:
Ý nghĩa thực tiễn của luận án đã được thể hiện rõ ngay trong phần mở đầu và phần đầu chương I. Đó là định hướng nghiên cứu, thiết kế và hiện thực hóa một hệ thống điều khiển định hướng không gian cho những đối tượng cụ thể là lớp TBBTSKNL. Đối tượng nghiên cứu và đối tượng được áp dụng kết quả nghiên cứu đều có tính cấp thiết, tính thực tế cao theo tình hình phát triển TBBTSKNL của thế giới và phục vụ an ninh quốc phòng của nước ta.
Kết quả nghiên cứu ở chương 4 đã dẫn tới những kết luận quan trọng có tính thực tiễn sâu sắc. Đó là khả năng kỹ thuật, khả năng công nghệ trong nước có thể tự nghiên cứu, thiết kế chế tạo được hệ thống điều khiển định hướng không gian cho TBB nói chung và TBBTSKNL nói riêng. Hơn nữa, theo những tính toán trong luận án, thì những mục đích thực tế ban đầu đặt ra như giá thành thấp, kích thước, khối lượng nhỏ, độ tin cậy của sản phẩm cao,… hoàn toàn có thể đạt được.
Toàn bộ nội dung chương 4 còn có một ý nghĩa thực tế khác trong đào tạo ở các Học viện, Nhà trường. Vì đó là một bài thí nghiệm hoàn chỉnh, bổ ích và thiết thực trong vấn đề nâng cao khả năng thực hành cho người học chuyên ngành điều khiển các TBB. Ý nghĩa thực tiễn của các nghiên cứu
không chỉ thể hiện ở khả năng thực tế hóa mô hình hệ thống thành sản phẩm, mà còn chứng minh được chất lượng và hiệu quả kinh tế của nó thông qua việc sử dụng các giải pháp công nghệ mới và có giá thành phù hợp mà luận án đề xuất, cùng kết quả thực nghiệm đạt được để khẳng định.
Có thể bạn quan tâm!
-
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 1
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 1 -
 Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 2
Nghiên cứu xác định định hướng không gian của thiết bị bay theo các phép đo từ trường trái đất - 2 -
 Mục Tiêu, Nội Dung Và Phương Pháp Nghiên Cứu Của Luận Án Mục Tiêu Chính Của Luận Án Là:
Mục Tiêu, Nội Dung Và Phương Pháp Nghiên Cứu Của Luận Án Mục Tiêu Chính Của Luận Án Là: -
 Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát
Ý Nghĩa Của Việc Ổn Định Định Hướng Không Gian Cho Tbb Trinh Sát -
 Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến
Những Khái Niệm Cơ Bản Về Từ Trường Trái Đất Và Cảm Biến -
 Bản Chất Và Đặc Tính Của Sai Số Khi Đo Từ Trường Trên Thiết Bị Bay
Bản Chất Và Đặc Tính Của Sai Số Khi Đo Từ Trường Trên Thiết Bị Bay
Xem toàn bộ 151 trang tài liệu này.
Chương 1
HỆ DẪN ĐƯỜNG QUÁN TÍNH KHÔNG ĐẾ VÀ BÀI TOÁN ĐỊNH HƯỚNG THIẾT BỊ BAY TRINH SÁT KHÔNG NGƯỜI LÁI
Nội dung chương này giới thiệu những vấn đề cơ bản lý thuyết điều khiển quán tính (ĐKQT) với hệ thống dẫn đường không đế có liên quan trực tiếp với những nội dung cần nghiên cứu của LA như: sự cần thiết đặt bài toán phải ổn định định hướng TBBTSKNL; cấu trúc của hệ thống điều khiển (HTĐK) trên khoang TBB; về cơ sở toán học mô tả hệ ổn định định hướng TBB trong hệ thống dẫn đường quán tính.
Những nội dung trên giúp ta hình dung toàn bộ quá trình điều khiển TBBKNL trong mối liên hệ với những vấn đề cần triển khai nghiên cứu ở những chương tiếp theo như: đo – xử lý thông tin vận tốc góc và góc định hướng; điều khiển và ổn định định hướng TBB.
1.1 Hệ thống dẫn đường quán tính
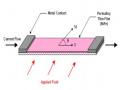
TBBKNL hiểu một cách thông thường là một loại TBB với sơ đồ khí động kiểu cánh phẳng (sơ đồ máy bay). Trong cơ học bay [2, 4] người ta đã mô tả chuyển động của TBB như chuyển động của một vật thể rắn, tức là xem xét mọi chuyển động tịnh tiến của trọng tâm lẫn chuyển động quay của TBB quanh trọng tâm một cách độc lập (hình 1.1). Mô hình này rất thích hợp khi giải hầu hết các bài toán cơ học bay. Sự quan tâm tới những mô hình chuyển động phức tạp có tính tới tính chất biến dạng TBB, dịch chuyển khối lượng nhiên liệu,... rất ít khi phải đòi hỏi. Đối với mục đích của luận án này vấn đề nghiên cứu mô hình chuyển động của TBBKNL như một vật thể rắn đã là đủ vì nó chuyển động với vận tốc nhỏ (dưới 100km/h) và không đòi hỏi khả năng cơ động cao.
Để mô tả chuyển động của TBB người ta sử dụng nhiều hệ tọa độ khác nhau, liên hệ với Trái đất, với dòng khí chuyển động hoặc với chính
Mz1
Z1
Mx1
Y1
My1 6
7
5
4
bản thân TBB [2, 27, 33] như 2 3
1
hệ tọa độ địa lý (kinh độ, vĩ độ, X1
độ cao), hệ tọa độ quán tính (XqYqZq), hệ tọa độ vận tốc (XYZ) và hệ tọa độ liên kết (X1Y1Z1).
Hình 1.1 Sơ đồ máy bay và những cơ cấu điều khiển
1 – thân; 2 – cánh; 3 – cánh liệng; 4 – cánh ổn định; 5 – cánh lái tầm; 6 – cánh lái hướng; 7 – cánh ổn định hướng.
Để mô tả những chuyển động quay của TBB có sơ đồ khí động cánh phẳng người ta thường sử dụng các góc Ơ-le [2, 33]: góc gật , góc hướng và góc liệng .
Các lực và mômen tác động lên TBB trong dòng khí chuyển động thường phụ thuộc vào các góc tấn công , góc trượt và đại lượng vận tốc dòng khí V (hay hệ số Mach - M) [2, 11, 44].
Trong trường hợp chung thì chuyển động của TBBKNL được mô tả bằng những phương trình vi phân theo định luật 2 Niu-tơn:
d2r
m F và dt 2
jdM
dt
(1.1)
Với: r – vector bán kính trọng tâm TBB trong hệ tọa độ được chọn; m – khối lượng;
J – mômen quán tính;
- vector vận tốc góc quay TBB như một vật thể cứng;
F – vector tổng các lực tác động lên TBB;
M – vector tổng các mômen tác động lên TBB.
Trong (1.1) phương trình thứ nhất mô tả chuyển động tịnh tiến của TBB, còn phương trình thứ hai mô tả chuyển động quay của nó xung quanh trọng tâm. Những chuyển động đó tự chúng không phụ thuộc lẫn nhau, nhưng có mối liên hệ thông qua dòng khí chuyển động bao xung quanh thân TBB. Dòng khí và những bộ phận khí động (thân, cánh nâng, cánh lái) của TBB lại sinh ra các lực và mômen khí động, tác động lên chính nó:
Ở đây:
F F(,, V, u)
M M(,, V, u)
(1.2)
(1.3)
và - góc tấn công và góc trượt tương ứng của TBB trong dòng khí; V - vận tốc dòng khí tương đối so với TBB;
u - vector điều khiển (vị trí của cánh lái liệng, cánh lái độ cao, cần ga điều chỉnh vòng quay động cơ để thay đổi tốc độ và nhiều cơ cấu khác).
1.2 Cấu trúc hệ dẫn đường cho máy bay không người lái
Hầu hết các loại TBBKNL có cự ly hoạt động, thời gian hành trình đáng kể đều sử dụng phương pháp dẫn đường quán tính (DĐQT). Tức là toàn bộ thông tin điều khiển hành trình đều được lập trình trước, thu thập và xử lý trên khoang TBB, không sử dụng nguồn thông tin từ bên ngoài.
1.2.1 Sơ đồ cấu trúc của hệ dẫn đường quán tính
Hệ thống điều khiển TBBKNL theo chức năng có thể phân thành hai hệ con, gọi là hệ điều khiển quỹ đạo bay và hệ định hướng thân [37, 39].
- Hệ điều khiển quỹ đạo (ĐKQĐ) giải bài toán dẫn TBB theo một quỹ đạo xác định cho trước, còn gọi là quỹ đạo chương trình.
- Hệ điều khiển định hướng (ĐKĐH) giải bài toán điều khiển định hướng và ổn định thân TBB theo định hướng cho trước của quỹ đạo chương trình thông qua các kênh điều khiển chuyển động gật, hướng và liệng.
Hệ ĐKĐH có liên hệ trực tiếp với hệ ĐKQĐ trong quá trình điều khiển
để tạo lực - mômen, quá tải điều khiển, làm dịch chuyển trọng tâm, còn trong quá trình ổn định định hướng hệ này hoạt động độc lập.
Mối liên hệ giữa TBB, các hệ điều khiển của nó với thế giới bên ngoài và giữa chúng với nhau được thể hiện trên sơ đồ khối đơn giản hình 1.2.
tác động của dòng khí chuyển động
tác động điều khiển của hệ thống
Cánh lái và động cơ của TBB
Vector bán kính r=F(x,y,z)
Các góc ĐH: , ,
và vector vận tốc góc x, y, z,
Các góc ĐH: , theo dòng khí và vector vận tốc V
Hệ thống ĐK TBBKNL
Các bộ đo tín hiệu không gian của TBB
Các tín hiệu không gian đo được
Ch.trình bay cho trước
Thuật toán ĐKĐH thân của TBB
Vector điều khiển u
các góc và vận tốc góc định hướng cho trước (pro, pro, pro )
Bộ đo Tọa độ của
TBB
Các bộ đo góc và vận tốc góc định hướng TBB
Các tọa độ đo được: kinh độ; vĩ độ; độ cao
Các góc ĐH và vector vận tốc góc
đo được
Hệ thống đạo hàng quán tinh
Thuật toán ĐKQĐ bay của TBB
Thân TBBKNL
Hình 1.2 Sơ đồ khối đơn giản hệ thống điều khiển quán tính MBKNL
Tác động lên TBBKNL là dòng khí chuyển động tương đối so với nó, lực đẩy của động cơ và những góc quay cánh lái được thiết lập bởi vector u, do hệ thống điều khiển tạo ra.
Những tác động đó làm thay đổi:
a) Trong hệ tọa độ quán tính OXqYqZq.
- Vị trí TBB trong không gian (vector r ) cho phép xác định cự ly và độ
cao.
- Vận tốc góc quay vector bán r (vector ) trong không gian;
- Các góc định vị thân TBB trong không gian (góc hướng , góc gật ,
góc liệng );
b) Trong hệ tọa độ vận tốc XYZ và hệ tọa độ liên kết X1Y1Z1.
- Vận tốc dòng khí V và các góc tấn công , góc trượt ;
- Góc và vận tốc góc quay thân TBB quanh các trục X1Y1Z1 của hệ TĐLK ( , ,, , , );
- Gác góc nghiêng quỹ đạo (góc nghiêng vector vận tốc V ) trong mặt phẳng đứng và trong mặt phẳng ngang .
Như vậy trong hệ dẫn đường quán tính, các nguồn thông tin khác nhau được lấy từ các hệ tọa độ khác nhau. Để thuận tiện cho quá trình xử lý tin, người ta biến đổi chúng về cùng một hệ tọa độ nhờ phép quay Ơle và tính toán chúng thông qua ma trận cosin định hướng. Hệ tọa độ về cơ bản có các hệ tọa độ chính; hệ tọa độ quán tính, hệ tọa độ định tâm, hệ tọa độ địa phương, hệ tọa độ vận tốc và hệ tọa độ liên kết.
1.2.2 Thành phần hệ thống DĐQT, bao gồm:
Hệ ĐKQĐ (bộ đo tọa độ trọng tâm, thuật toán điều khiển quỹ đạo TBB);
Hệ ĐKĐH thân TBB (các cảm biến đo góc, vận tốc góc định hướng và thuật toán ổn định, điều khiển định hướng).
Hệ thống tạo tín hiệu không gian (các bộ đo vector từ trường Trái đất H1 góc tấn công , góc trượt , vận tốc V, áp lực tốc độ q, độ cao H).
Hệ ĐKQĐ đo các tọa độ không gian của TBBKNL, so sánh các tọa độ
tức thời này với các tọa độ chương trình bay theo thuật toán điều khiển hình thành các tham số điều khiển và sau đó là các lệnh điều khiển, cuối cùng là hình thành ra tác động điều khiển làm thay đổi vị trí trong tâm của TBB trong không gian.
Hệ thống tín hiệu không gian thực hiện đo vận tốc chuyển động, góc tấn công và góc trượt của TBB và truyền những thông tin đo được vào hệ ĐKĐH để hình thành ra các tác động điều khiển.
Hệ ĐKĐH thực hiện đo các góc định hướng thân và vector vận tốc góc quay thân của TBB. So sánh các đại lượng đo được với những đại lượng cho trước (do hệ ĐKQĐ tạo ra), ngoài ra sử dụng cả những thông tin do hệ thống tín hiệu không gian, hệ ĐKĐH tạo ra những tác động điều khiển tới cánh lái, tới động cơ (thay đổi lực đẩy), nói chung là làm thay đổi vector u (vector điều khiển).
1.3 Hệ điều khiển định hướng thân TBBKNL
1.3.1 Nguyên lý làm việc và cấu trúc
a) Nguyên lý làm việc.
Hệ ĐKĐH [37, 39] thực hiện việc điều khiển vị trí và tốc độ quay thân TBB quanh trọng tâm (quanh các trục của hệ TĐLK) trong hai chế độ: điều khiển và ổn định quỹ đạo định hướng. Thay đổi hay ổn định vị trí góc thân TBB theo phương pháp tạo lực và mômen điều khiển khí động cuối cùng đều dẫn tới việc tạo ra hay ổn định gia tốc pháp tuyến do hệ thống điều khiển quỹ đạo tạo ra. Kết quả cuối cùng là làm thay đổi hay ổn định quỹ đạo bay theo các phép so sánh tọa độ với chương trình bay định trước.
b) Cấu trúc của hệ ĐKĐH