số trường hợp, các giá trị kích hoạt của các đơn vị trải qua quá trình nới lỏng (tăng giảm số đơn vị và thay đổi các liên kết) cho đến khi mạng đạt đến một trạng thái ổn định và các giá trị kích hoạt không thay đổi nữa.
Hình 2.7 Mạng nơ-ron hồi quy
2.1.1.3 Các luật học của mạng nơ-ron nhân tạo
Luật học là một trong ba yếu tố quan trọng tạo nên một mạng nơ-ron nhân tạo (mô hình của nơ-ron, cấu trúc và sự liên kết giữa các nơ-ron, phương pháp học được áp dụng cho mạng nơ-ron). Có hai vấn đề cần học đối với mỗi mạng nơ-ron nhân tạo đó là học tham số (parameter learning) và học cấu trúc (structure learning).
Học tham số là việc thay đổi trọng số của các liên kết giữa các nơ-ron trong một mạng, còn học cấu trúc là việc điều chỉnh cấu trúc của mạng bao gồm thay đổi số lớp nơ-ron, số nơ-ron của mỗi lớp và cách liên kết giữa chúng. Hai vấn đề này có thể được thực hiện đồng thời hoặc tách biệt.
Về mặt phương pháp học, có thể chia ra làm ba loại: học có giám sát hay còn gọi là học có thầy (supervised learning), học tăng cường (reinforcement learning) và học không có giám sát hay còn gọi là học không có thầy (unsupperviced learning).
Có thể bạn quan tâm!
-
![Nghiên Cứu Auv Mô Hình Tại Trường Đh Bách Khoa Hà Nội [7]](https://tailieuthamkhao.com/uploads/2023/02/21/nghien-cuu-dieu-khien-thich-nghi-cho-robot-lan-tu-hanh-4-1-120x90.jpg)
![Nghiên Cứu Auv Mô Hình Tại Trường Đh Bách Khoa Hà Nội [7]](data:image/svg+xml,%3Csvg%20xmlns=%22http://www.w3.org/2000/svg%22%20viewBox=%220%200%2075%2075%22%3E%3C/svg%3E) Nghiên Cứu Auv Mô Hình Tại Trường Đh Bách Khoa Hà Nội [7]
Nghiên Cứu Auv Mô Hình Tại Trường Đh Bách Khoa Hà Nội [7] -
 Các Nghiên Cứu Về Điều Khiển Auv Trên Thế Giới
Các Nghiên Cứu Về Điều Khiển Auv Trên Thế Giới -
 Tổng Quan Về Mạng Nơ-Ron Nhân Tạo Trong Điều Khiển
Tổng Quan Về Mạng Nơ-Ron Nhân Tạo Trong Điều Khiển -
 Wij O J I , (3.29)
Wij O J I , (3.29) -
 Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến
Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến -
 Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv
Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv
Xem toàn bộ 169 trang tài liệu này.
2.1.2 Điều khiển tự động dùng mạng nơ-ron nhân tạo
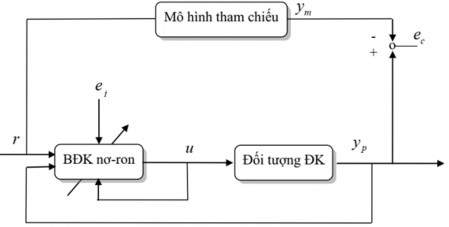
Có nhiều phương pháp khác nhau để biến mạng nơ-ron thành bộ điều khiển thích nghi cho đối tượng điều khiển và các phương pháp đó có thể được chia làm hai loại là điều khiển gián tiếp và điều khiển trực tiếp [3], [11], [12].
Phương pháp điều khiển gián tiếp, dùng một mạng nơ-ron để nhận dạng và ước lượng các thông số của đối tượng điều khiển và các thông số của BĐK được lựa chọn dựa vào giả thiết các thông số đã được nhận dạng chính là giá trị chính xác của véc tơ thông số đối tượng điều khiển dựa trên nguyên lý tương đương. Phương pháp này không yêu cầu phải biết trước các thông số của đối tượng điều khiển. Tuy nhiên, nó yêu cầu, ngoài mạng nơ-ron đóng vai trò bộ điều khiển, phải thêm vào một mạng nơ-ron khác dùng để mô phỏng đối tượng điều khiển (hình 2.8).
Bộ mô phỏng nhận dạng đối tượng điều khiển cần một giai đoạn huấn luyện trước với một tập dữ liệu đủ lớn để nhận dạng các mô hình động học chính xác hay mô hình nghịch đảo của đối tượng điều khiển.
Hình 2.8 Sơ đồ phương pháp điều khiển gián tiếp [3]
Hình 2.9 Sơ đồ phương pháp điều khiển trực tiếp [3]
Phương pháp điều khiển trực tiếp (hình 2.9), đơn giản hơn phương pháp gián tiếp, không yêu cầu quá trình huấn luyện trước để nhận dạng các thông số của đối tượng điều khiển và cung cấp các luật thích nghi để cập nhật các hàm trọng lượng của mạng nơ-ron.
2.2 Ứng dụng mạng nơ-ron nhân tạo điều khiển AUV
Phần này tác giả tổng kết và phân tích các nghiên cứu gần đây về ứng dụng mạng nơ-ron nhân tạo trong điều khiển nói chung và AUV nói riêng. Những nghiên cứu này tiêu biểu cho giai đoạn 30 năm trở lại đây.
Năm 1995 F.L. Lewis và cộng sự nghiên cứu về bộ điều khiển nơ-ron cho robot bám theo quỹ đạo với thuật toán bền vững [86]. Cũng năm này,
R.M. Sanner (1995) và cộng sự trình bày nghiên cứu về điều khiển thích nghi cánh tay robot dùng mạng nơ-ron nhân tạo, trong đó thuật toán nơ-ron thích nghi được áp dụng [108].
B. Borvic (2001) và cộng sự nghiên cứu về điều khiển AUV sử dụng mạng nơ-ron nhân tạo [14]. Trong đó bộ điều khiển xử lý nhiệm vụ điều khiển chính xác chuyển động của AUV tính đến tính năng động học của hệ động lực, dòng chảy. Bộ điều khiển sử dụng kết hợp thuật toán truyền thống và mạng nơ-ron nhân tạo thích nghi. J.H. Li và cộng sự (2002) trình bày nghiên cứu điều khiển chuyển động của AUV với bộ điều khiển nơ-ron thích nghi [104].
J.Q. Huang và F. L. Lewis (2003) đề xuất nghiên cứu về điều khiển các hệ phi tuyến bằng kỹ thuật điều khiển dự đoán sử dụng mạng nơ-ron nhân tạo với tín hiệu đầu vào trễ [118].
Yang Shil và Weiqi Qian (2007) trình bày nghiên cứu điều khiển thích nghi độ sâu AUV áp dụng mạng nơ-ron truyền thẳng [94]. Đây là mạng nơ- ron phổ biến và cũng được trình bày và ứng dụng trong [3], [8], [9]. A. Forouzantabar (2007) và cộng sự đề xuất điều khiển mô hình robot mới có thể bước đi dùng mạng nơ-ron [102] bộ điều khiển nơ-ron với thuật toán lan truyền ngược tín hiệu [110].
Năm 2008 L. Zhang và cộng sự đề xuất nghiên cứu điều khiển AUV dựa trên mạng nơ-ron mờ, đây là kỹ thuật kết hợp mạng nơ-ron với thuật toán điều khiển mờ nhằm nâng cao chất lượng bộ điều khiển theo hướng tận dụng ưu điểm của mạng nơ-ron và logic mờ [105].
Năm 2010 X. Liang và cộng sự đề xuất điều khiển chuyển động cho AUV với mạng nơ-ron song song [103].
Năm 2012 A. Forouzantabar và cộng sự công bố nghiên cứu về điều khiển nơ-ron thích nghi cho AUV [64]. Mô hình AUV này có tính phi tuyến cao, vì vậy các tác giả sử dụng mạng nơ-ron phi tuyến để xấp xỉ đặc tính động học của AUV giúp vượt qua được các hạn chế của các bộ điều khiển truyền thống và đảm bảo chất lượng điều khiển tốt. Tính ổn định được đảm bảo bằng nguyên lý Lyapunov và bộ điều khiển được kiểm chứng đánh gia qua mô phỏng.
Năm 2013 J. Liu giới thiệu nghiên cứu về ứng dụng mạng nơ-ron “Radial Basic Function” cho điều khiển các hệ thống cơ khí. Tác giả trình bày phân tích hệ thống, thiết kế và mô phỏng trên Matlab [70]. B.B. Miao và cộng sự (2013) trình bày nghiên cứu về điều khiển thích nghi bền vững cho AUV bám quỹ đạo sử dụng mạng nơ-ron nhiều lớp [119].
Năm 2014 X. Lei và P. Lu đã trình bày về điều khiển cánh xoay của phương tiện bay không người lái loại nhỏ dùng mạng nơ-ron thích nghi Radial Basic Function [88]. M.M. Fateh và cộng sự (2014) cũng áp dụng mạng nơ-
ron này để điều khiển thích nghi hệ thống cánh tay robot [89]. J. Sun và J. Chen (2014) đã nghiên cứu điều khiển dự đoán với mạng nơ-ron cho các hệ thống cho các tín hiệu trễ không xác định hoặc xác định một phần [124], nghiên cứu này có thể tham khảo cho điều khiển hệ thống động học phức tạp như AUV. Tiếp theo C.F. Caruntu và C. Lazar (2014) trình bày về dự đoán bù trễ cho mạng dựa trên mô hình trễ thời gian [127].
Năm 2015 M. Daachi và cộng sự nghiên cứu về bộ điều khiển nơ-ron thích nghi cho khớp nối hỗ trợ đầu gối [87]. Bộ điều khiển này dùng mạng nơ-ron Radial Basic Function. Y. Chu và J. Fei (2015) cũng đã sử dụng mạng nơ-ron này cho điều khiển thích nghi dạng trượt kính viễn vọng MEMS [90].
Năm 2016 Y.C. Liu và cộng sự đã ứng dụng bộ điều khiển nơ-ron kết hợp logic mờ điều khiển thích nghi bền vững cho AUV có tính đến động học hệ động lực [120]. Cũng năm 2016 J. Gao và cộng sự đề xuất nghiên cứu điều khiển thích nghi dự đoán sử dụng mạng nơ-ron với mô hình dự đoán nhận dạng ảnh [123]. S. Li và G.P. Liu (2016) đề xuất nghiên cứu điều khiển dự đoán sử dụng mạng nơ-ron cho các hệ phi tuyến cao có nhiễu loạn và mất dữ liệu [125]. Tiếp theo Y. Sheng và cộng sự (2016) trình bày nghiên cứu về ổn định toàn bộ cho trễ phụ thuộc của mạng nơ-ron hồi quy trễ [126]. Y. Ding và cộng sự (2016) điều khiển độ sâu AUV bằng kỹ thuật điều khiển dự đoán [128].
Năm 2017 B. Geranmehr và K. Vafaee trình bày nghiên cứu về bộ điều khiển nơ-ron thích nghi lai dạng trượt với thành phần tham số bền vững cho AUV [63]. Nghiên cứu này sử dụng điều khiển phi tuyến có khả năng loại bỏ nhiễu loạn thông qua kỹ thuật ước lượng thông minh các đặc tính không chắc chắn của AUV và môi trường. Tác giả sử dụng mạng nơ-ron Radial Basic Function để ước lượng các thành phần không chắc chắn và chưa xác định của đặc tính động học.
Cũng vào năm 2017, R. Cui và cộng sự trình bày nghiên cứu về điều khiển AUV bằng mạng nơ-ron thích nghi với đầu vào điều khiển phi tuyến sử dụng thuật toán học tăng cường [67]. Bài báo này trình bày điều khiển AUV
theo quỹ đạo trong mặt phẳng ngang tính đến ảnh hưởng của ngoại cảnh, tính phi tuyến của tín hiệu vào và của mô hình AUV. Bộ điều khiển nơ-ron thích nghi sử dụng 2 mạng nơ-ron critic và action để đánh giá chất lượng bộ điều khiển vào thời điểm hiện tại và để bù thành phần động học không xác định. Phần tử bù được các tác giả thêm vào để loại bỏ các yếu tố phi tuyến của tín hiệu vào điều khiển. Bộ điều khiển nơ-ron thích nghi này được kiểm chứng đánh giá bằng mô phỏng.
Năm 2018 Jiemei Zhao trình bày nghiên cứu về điều khiển dự đoán sử dụng mạng nơ-ron cho AUV với kỹ thuật trễ tín hiệu đầu vào [62]. Trong đó bộ điều khiển thực hiện nhiệm vụ điều khiển AUV bám theo đường đi. Để bù độ trễ trong hệ thống điều khiển và thực hiện yêu cầu bám theo đường đi xác định, tác giả đề xuất thuật toán điều khiển dự đoán. Một mạng nơ-ron được sử dụng để ước lượng thành phần phi tuyến không chắc chắn trong tính năng động học của AUV và do sự tương tác của các thành phần góc hướng, góc chúi và góc nghiêng AUV. Tính ổn định được đảm bảo bằng nguyên lý Lyapunov. Tác giả cũng mô phỏng kiểm chứng thuật toán đã đề xuất.
Năm 2019 U. Ansari và A.H. Bajodah nghiên cứu về điều khiển AUV với thuật toán nơ-ron thích nghi và động học nghịch đảo [61]. Trong bài báo, kết cấu điều khiển 2 vòng lặp được trình bày. Vòng ngoài (chậm) sử dụng bộ điều khiển PD truyền thống để tạo lệnh điều khiển góc hướng và góc chúi dựa trên sai số vị trí. Lệnh điều khiển độ sâu được đưa vào vòng điều khiển trong (nhanh), trong đó sử dụng thuật toán điều khiển nơ-ron thích nghi và động học nghịch đảo (Neuro-Adaptive Generalized Dynamic Inversion / NAGDI). Thêm vào đó tác giả sử dụng mạng nơ-ron Radial Basic Function để ước lượng thành phần phi tuyến trong chuyển động trục đứng của AUV nâng cao khả năng thích nghi cho hệ thống điều khiển.
Tại Việt Nam các tác giả trong [3], [8] và [9] giới thiệu thuật toán điều khiển nơ-ron cho AUV và mô phỏng kết quả trên máy tính. Những nghiên cứu loại này chưa nhiều và chưa ứng dụng đầy đủ cho các tình huống làm việc của AUV.
2.3 Kết luận chương 2
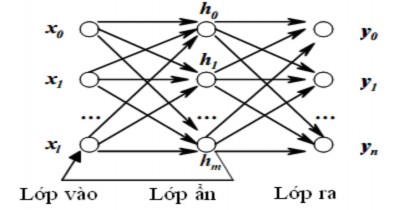
Trong chương này, tác giả đã trình bày tổng quan về mạng nơ-ron nhân tạo và kỹ thuật ứng dụng mạng nơ-ron nhân tạo vào điều khiển thích nghi các đối tượng. Cấu trúc mạng nơ-ron nhiều lớp truyền thẳng và các hàm phổ biến được trình bày. Tác giả cũng nghiên cứu tình hình ứng dụng mạng nơ-ron nhân tạo trong điều khiển nói chung và điều khiển AUV nói riêng một cách hệ thống trong khoảng thời gian 30 năm trở lại đây nhằm làm rõ nền tảng công nghệ, kỹ thuật ứng dụng điều khiển thích nghi bằng mạng nơ-ron cho các hệ thống động học, đặc biệt với đối tượng phức tạp là AUV.
CHƯƠNG 3
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN NƠ-RON THÍCH NGHI CHO ROBOT LẶN TỰ HÀNH
Trong chương này tác giả nghiên cứu nguyên lý ứng dụng mạng nơ- ron thích nghi tương tác [3] vào điều khiển đối tượng AUV với hai hướng chính: điều khiển riêng các chuyển động của AUV và điều khiển dẫn đường cho AUV thực hiện các nhiệm vụ dưới nước. Tác giả trình bày cách đưa vấn đề điều khiển trong từng tình huống vào hàm mục tiêu của mạng nơ-ron và đề xuất thuật toán huấn luyện mạng trực tuyến trong quá trình điều khiển để đạt được các mục tiêu điều khiển. Kỹ thuật dẫn đường cho AUV cũng được giới thiệu để kết hợp với thuật toán điều khiển giúp AUV thực hiện tự động các nhiệm vụ dưới nước. Các kết quả mô phỏng minh họa cho từng tình huống lần lượt được trình bày trong Chương 4.
3.1 Mô hình toán học AUV sử dụng trong nghiên cứu
3.1.1 Cấu tạo của mô hình NPS AUV II
Trong đề tài, tác giả sử dụng mô hình toán học phi tuyến robot lặn tự hành AUV của Naval Postgraduate School (Monterrey) được mô tả trong (Fossen, 2002) [31]. Các chi tiết về mô hình này như hình 3.1 và hình 3.2. Mô hình toán học của nó được trình bày tại 3.1.2, các thông số động học và động lực học tại bảng 4.1 và m-file (Matlab) được trình bày tại Phụ lục.
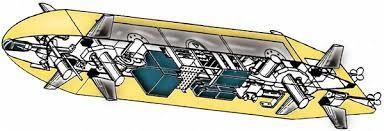
Hình 3.1 Mô hình NSP AUV II