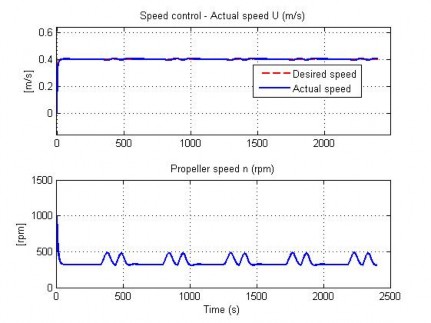
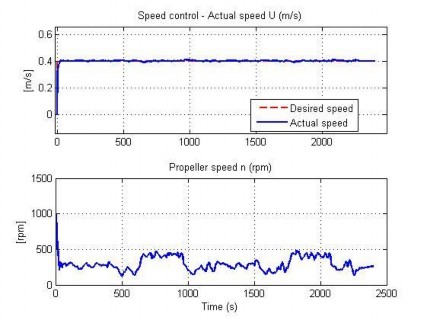
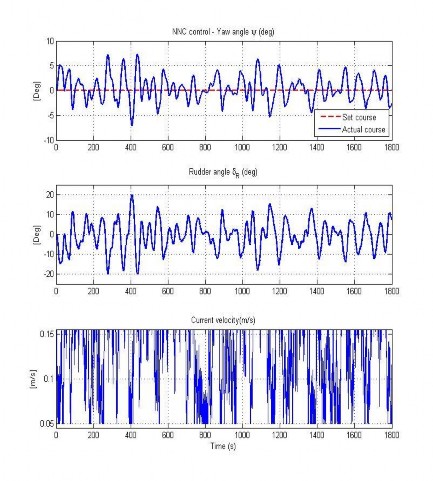
Hình 4.43 Đáp ứng tốc độ của AUV trong TN10
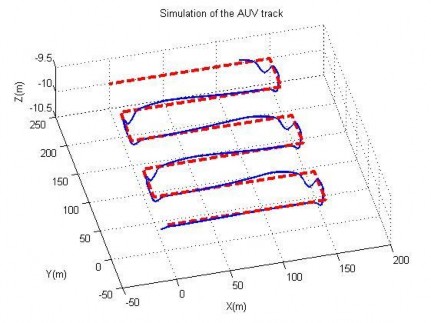
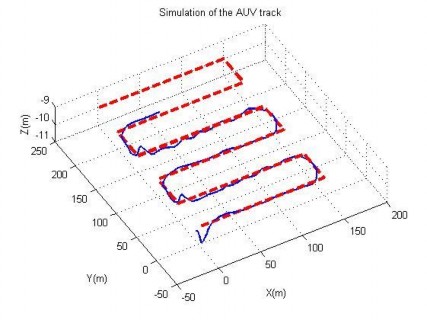
Hình 4.44 Quỹ đạo chuyển động của AUV trong TN10
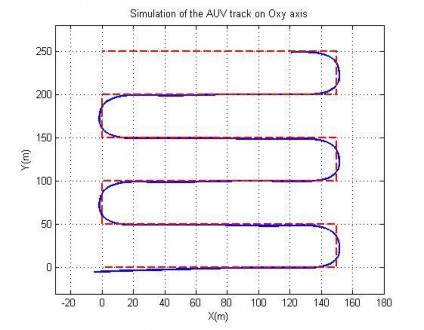
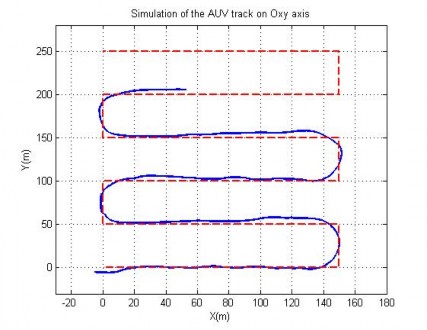
Hình 4.45 Quỹ đạo trên mặt phẳng ngang của AUV trong TN10
Có thể bạn quan tâm!
-
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3) -
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5) -
 Đáp Ứng Độ Sâu Của Auv Trong Tn7
Đáp Ứng Độ Sâu Của Auv Trong Tn7 -
 Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13 -
 Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17
Xem toàn bộ 169 trang tài liệu này.
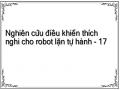
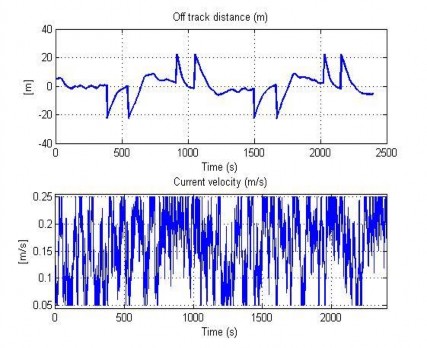
Hình 4.46 Khoảng cách dạt trên mặt phẳng ngang (TN10)
Trong Thí nghiệm 10, BĐK NNC chỉ điều khiển cánh điều khiển độ sâu phía sau do AUV chỉ làm việc trong mặt phẳng ngang, BĐK PD điều khiển cánh phía trước giúp ổn định góc chúi AUV. Hướng dẫn đường là hướng giữa 2 điểm chuyển hướng của đoạn quỹ đạo hiện tại. Độ dạt ngang được đưa vào thuật toán học online của BĐK NNC giúp AUV ổn định bám theo quỹ đạo.
- Thí nghiệm 11: Mô phỏng điều động zig-zag khi tính đến độ lệch khỏi đường đi theo mặt phẳng ngang, có dòng chảy tác động.
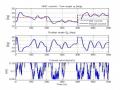
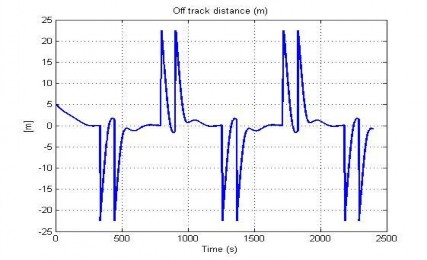
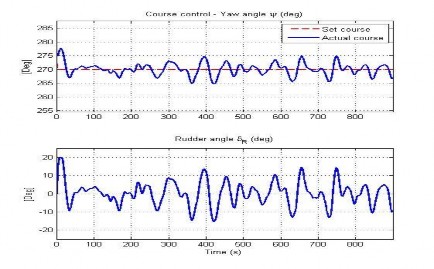
Hình 4.47 Đáp ứng hướng đi của AUV trong TN11
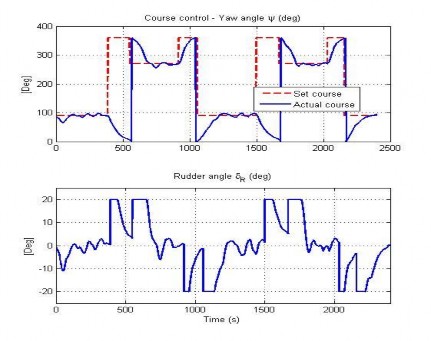
Hình 4.48 Đáp ứng độ sâu của AUV trong TN11
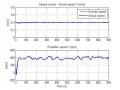
Hình 4.49 Đáp ứng tốc độ của AUV trong TN11
Hình 4.50 Quỹ đạo chuyển động của AUV trong TN11
Ảnh hưởng tác động của ngoại cảnh làm AUV dao động và dạt ngang nhưng vẫn ổn định xung quanh quỹ đạo chuyển động mong muốn.
Hình 4.51 Quỹ đạo trên mặt phẳng ngang của AUV trong TN11
Hình 4.52 Khoảng cách dạt trên mặt phẳng ngang (TN11)
Mục đích của thí nghiệm này là minh họa hoạt động của hệ thống điều khiển dẫn đường trên hình 3.11. Trong đó BĐK NNC nhận dạng tác động của dòng chảy thông qua độ dạt do nó gây ra cho AUV được tính trong mỗi chu trình điều khiển. Độ dạt này đại diện bởi tham số (mục 3.5.2). Quá trình học của mạng nơ-ron được tính đến giá trị (phương trình 3.68) nên BĐK
thích nghi với tác động của dòng chảy qua mỗi chu trình điều khiển, làm cho AUV bám sát quỹ đạo mong muốn mặc dù dòng chảy có xu hướng đẩy dạt AUV ra xa quỹ đạo này, hoặc sau mỗi lần thay đổi hướng trên đoạn đường tiếp theo, khoảng cách từ AUV đến đoạn quỹ đạo mới lại ổn định dần về zero (hình 4.52, đồ thị phía trên).
4.3.2 Điều khiển AUV bám theo địa hình đáy
- Thí nghiệm 12: Mô phỏng điều khiển AUV bám theo địa hình đáy.
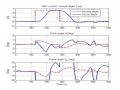
Hình 4.53 Đáp ứng hướng của AUV trong TN12
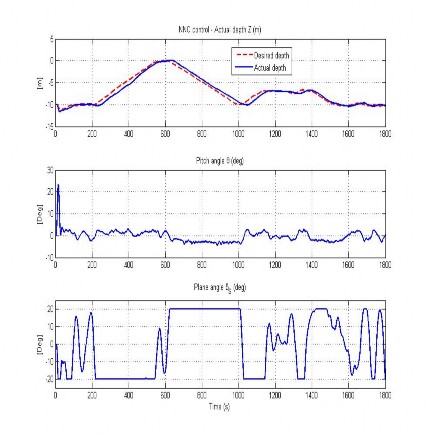
Hình 4.54 Đáp ứng độ sâu của AUV trong TN12
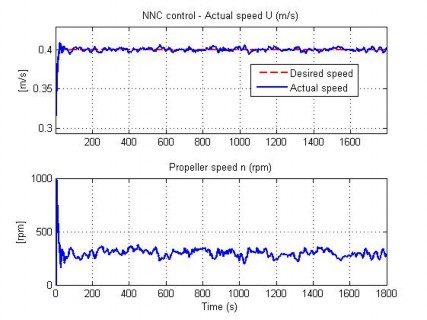
Hình 4.55 Đáp ứng tốc độ AUV trong TN12
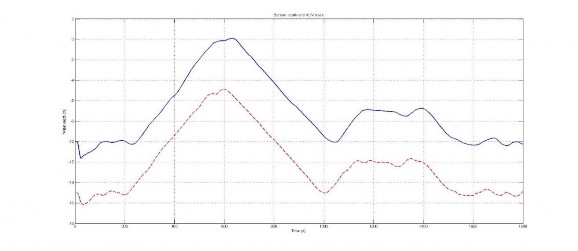
Hình 4.56 Độ sâu thực tế của AUV (nét liền, xanh) và đáy (nét đứt, đỏ)
Trong thí nghiệm này, AUV đi thẳng theo hướng cố định 0 có tác động của dòng chảy. Vị trí của AUV theo chiều thẳng đứng (trục Oz) luôn cách đáy khoảng cách 5m. Trong thực tế khoảng cách này luôn xác định được bằng máy đo sâu hồi âm. Kết quả mô phỏng cho thấy AUV luôn đi theo quỹ đạo ổn định cách đáy một khoảng cách mong muốn 5m với sai số nhỏ và bám theo hình dạng đáy.
4.4 Mô phỏng điều khiển AUV thích nghi với ngoại cảnh
4.4.1 Điều khiển AUV dưới tác động của dòng chảy
- Thí nghiệm 13: Mô phỏng điều khiển AUV bám theo đường thẳng khi chưa tính đến độ dạt khỏi đường đi trong thuật toán điều khiển.
Hình 4.57 Đáp ứng hướng đi của AUV trong TN13