[48] D. Brutzman and M. Compton, “AUV Research at the Naval Postgraduate School”, Sea Technol. J., vol. 32, no. 12, pp. 35–40, 1991.
[49] D. Marco, A. Healey, and R. McGhee, Autonomous underwater vehicles: Hybrid control of mission and motion. pp. 169–186, Springer US, 1996.
[50] D. Brutzman, “A virtual world for an autonomous underwater vehicle”, Naval Postgraduate School, MONTEREY, CA, 1994.
[51] T. Furukawa, “Reactive obstacle avoidance for the remus autonomous underwater vehicle utilizing a forward looking sonar”, Naval Postgraduate School, MONTEREY, CA, 2006.
[52] A. Healey, “Obstacle avoidance while bottom following for the REMUS autonomous underwater vehicle” in IFAC Symposium on Intelligent Autonomous Vehicles, 2004. 89
[53] D. Hemminger, “Vertical Plane Obstacle Avoidance and Control of the REMUS Autonomous Underwater Vehicle Using Forward Looking Sonar”, Naval Postgraduate School, MONTEREY, CA, 2005.
[54] P. Patron, E. Miguelanez, Y. R. Petillot, D. M. Lane, and J. Salvi, “Adaptive mission plan diagnosis and repair for fault recovery in autonomous underwater vehicles” in OCEANS 2008, pp. 1–9, 2008.
[55] E. Miguelanez, P. Patron, K. E. Brown, Y. R. Petillot, and D. M. Lane, “Semantic Knowledge-Based Framework to Improve the Situation Awareness of Autonomous Underwater Vehicles”, IEEE Trans. Knowl. Data Eng., vol. 23, no. 5, pp. 759–773, May 2011.
[56] M. Sfakiotakis, D. M. Lane, and J. B. C. Davies, “Review of fish swimming modes for aquatic locomotion”, IEEE J. Ocean. Eng., vol. 24, no. 2, pp. 237–252, Apr. 1999.
Có thể bạn quan tâm!
-
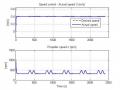
 Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ) -
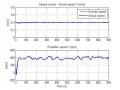 Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13 -
 Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 18
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 18 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 19
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 19 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 20
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 20
Xem toàn bộ 169 trang tài liệu này.
[57] K. Mohseni, “Zero-mass Pulsatile Jets for Unmanned Underwater Vehicle Maneuvering” in AIAA 3rd “Unmanned Unlimited” Technical Conference, Workshop and Exhibit, pp. 1–9, 2004.
[58] E. Lee, “Design of a soft and autonomous biomimetic micro-robotic fish” in 2010 5th IEEE Conference on Industrial Electronics and Applications, pp. 240–247, 2010.
[59] T. Prestero, “Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle”, MIT, 2001.
[60] G. Martins, A. Moses, M. J. Rutherford, and K. P. Valavanis, “Enabling intelligent unmanned vehicles through XMOS Technology”,
J. Def. Model. Simul. Appl. Methodol. Technol., vol. 9, no. 1, pp. 71– 82, Jan. 2011.
[61] Uzair Ansari, Abdulrahman H. Bajodah, Autonomous Underwater Vehicles Attitude control using Neuro-Adaptive Generalized Dynamic Inversion¸International Federation of Automatic Control online 52-29 (2019), pp. 103-109.
[62] Jiemei Zhao, Neural Network Predictive Control for Autonomous Underwater Vehicle with Input Delay, Journal of Control Science and Engineering Volume 2018, ID 2316957.
[63] Behdad Geranmehr, Kamran Vafaee, Hybrid Adaptive Neural Network AUV Controller Design with Sliding Mode Robust Term, International Journal of Maritime Technology, Vol.7 (2017), pp.49-55.
[64] Ahmad Forouzantabar, Babak Gholami, Mohammad Azadi, Adaptive Neural Network Control of Autonomous Underwater Vehicles, International Journal of Elwctrical and Computer Engineering, Vo;.6, No.7, 2012, pp.866-871.
[65] Ansari, U. and Bajodah, A.H. (2017a). Robust generalized dynamic inversion based control of autonomous underwater vehicles, Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 1475090217708640.
[66] Aras M.S.M., Abdullah S.S., Othman S.Y.B., Sulaiman M., Basar M.F., Zambri M.K.M., and Kamarudin M.N. (2016). Fuzzy logic
controller for depth control of underwater remotely operated vehicle. Journal of Theoretical & Applied Information Technology, 91(2).
[67] Cui, R., Yang, C., Li, Y., and Sharma, S. (2017). Adaptive neural network control of auvs with control input nonlinearities using reinforcement learning. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 47(6), 1019–1029.
[68] Farhan M., Bhatti A., Kamal W., and Yousafzai I. (2017). Sliding mode based mimo control of autonomous underwater vehicle. In Control Conference (ASCC), 2017 11th Asian, 2899–2904. IEEE.
[69] Khodayari, M.H. and Balochian, S. (2015). Modeling and control of autonomous underwater vehicle (AUV) in heading and depth attitude via self-adaptive fuzzy PID controller. Journal of Marine Science and Technology, 20(3), 559–578.
[70] Liu, J. (2013). Radial Basis Function (RBF) neural network control for mechanical systems: design, analysis and Matlab simulation. Springer Science & Business Media.
[71] McEwen, R. and Streitlien, K. (2001). Modeling and control of a variable-length AUV. Proc 12th UUST.
[72] W. Naeem, W., Sutton, R., and Ahmad, S. (2003). LQG/LTR control of an autonomous underwater vehicle using a hybrid guidance law. International Federation on Automatic Control Journal.
[73] Nelson R. (1997). Flight Stability and Automatic Control. McGraw- Hill, New York, second edition.
[74] M.R. Ramezani-al and Tavanaei - Sereshki Z. (2018). An adaptive sliding mode controller with a new reaching law for tracking problem of an autonomous underwater vehicles. Transactions of the Institute of Measurement and Control, 0142331218790791.
[75] Rath B.N., Subudhi B., Filaretov V., and Zuev A. (2017). A new backstepping control design method for autonomous underwater vehicle in diving and steering plane. In Region 10 Conference,
115
TENCON 2017-2017, IEEE, 1984–1987. IEEE.
[76] Rout, R. and Subudhi, B. (2017). Inverse optimal selftuning PID control design for an autonomous underwater vehicle. International Journal of Systems Science, 48(2), 367–375.
[77] Ruiz-Duarte, J.E. and Loukianov, A.G. (2015). Higher order sliding mode control for autonomous underwater vehicles in the diving plane. IFAC-PapersOnLine, 48(16), 49–54.
[78] Yao F., Yang C., Liu X., and Zhang M. (2018). Experimental evaluation on depth control using improved model predictive control for autonomous underwater vehicle (AUVs). Sensors, 18(7), 2321.
[79] Yildiz, O., G¨okalp, R.B., and Yilmaz, A.E. (2009). A review on motion control of the underwater vehicles. In Electrical and Electronics Engineering, 2009. ELECO 2009. International Conference on, II–337. IEEE.
[80] Chu, Z. and D. Zhu. (2016), Adaptive sliding mode heading control for autonomous underwater vehicle including actuator dynamics in OCEANS 2016- Shanghai. 2016. IEEE.
[81] Geranmehr, B. and S.R. Nekoo, (2015), Nonlinear suboptimal control of fully coupled non-affine sixDOF autonomous underwater vehicle using the statedependent Riccati equation. Ocean Engineering, 2015. 96: p. 248-257.
[82] Geranmehr, B. and S.R. Nekoo. (2014), The nonlinear suboptimal diving control of an autonomous underwater vehicle. in Robotics and Mechatronics (ICRoM), 2014 Second RSI/ISM International Conference on. 2014. IEEE.
[83] Geranmehr, B. and S.R. Nekoo. (2014) The statedependent set-point regulation and tracking control of horizontal motion of AUV. in Robotics and Mechatronics (ICRoM), Second RSI/ISM International Conference on. 2014. IEEE.
[84] Rezazadegan, F. and K. Shojaei. (2013) An Adaptive Control Scheme
for 6-DOF Control of an AUV Using Saturation Functions. in Proceedings of the 3rd International Conference on Intelligent Computational Systems.
[85] T. Wang, H. Gao, and J. Qiu, “A combined adaptive neural network and nonlinear model predictive control for multirate networked industrial process control,” IEEE Transactions on Neural Networks and Learning Systems, vol. 27, no. 2, pp. 416– 425, 2016.
[86] Lewis, F.L., K. Liu, and A. Yesildirek, (1995) Neural net robot controller with guaranteed tracking performance. IEEE Transactions on Neural Networks, 1995. 6(3): p. 703-715.
[87] Daachi, M., et al., (2015) A radial basis function neural network adaptive controller to drive a powered lower limb knee joint orthosis. Applied Soft Computing, 2015. 34: p. 324-336.
[88] Lei, X. and P. Lu, (2014) The adaptive radial basis function neural network for small rotary-wing unmanned aircraft. IEEE Transactions on Industrial Electronics, 2014. 61(9): p. 4808-4815.
[89] Fateh, M.M., S.M. Ahmadi, and S. Khorashadizadeh, (2014) Adaptive RBF network control for robot manipulators. Journal of AI and Data Mining, 2014. 2(2): p. 159-166.
[90] Chu, Y. and J. Fei, (2015) Adaptive global sliding mode control for MEMS gyroscope using RBF neural network. Mathematical Problems in Engineering, 2015.
[91] Slotine, J.-J.E. and W. Li, (1991) Applied nonlinear control. Vol. 199. prentice-Hall Englewood Cliffs, NJ.
[92] Xu Yuru, Xiao Kun, “Technology development of autonomous ocean vehicle”, Journal of Automation, vol. 33, no. 5, pp.518-521, 2007.
[93] Xu Yuru, Pang Yongjie, Wan Lei, Sun Yushan, “AUV-state-of-the-art and prospect”, CAAI Transactions on Intelligent Systems, vol. 1, no. 1, pp.9-16, 2006.
[94] Yang Shi1. Weiqi Qian. “Adaptive Depth Control for Autonomous
Underwater.Vehicles Based on Feedforward Neural Networks’’. Vol. 4, Issue 3, pp 107-118,2007.
[95] A. J. Healey and D. Lienard, “Multivariable sliding mode control for autonomous diving and steering o f unmanned underwater vehicles” IEEE Journal of Oceanic Engineering, vol. 18, no. 3,pp. 327-339, 1993.
[96] D. Xu, W. Yan, and Y. Shi, “Nonlinear variable structure double mode control of autonomous underwater vehicles”, Proc. IEEE International Symposium on Underwater Technology, pp. 425-430, Tokyo, May 23- 26, 2000.
[97] K. Mukherjee, I. N. Kar, and R. K. P. Bhatt, “Region tracking based control of an autonomous underwater vehicle with input delay,” Ocean Engineering, vol. 99, pp. 107–114, 2015.
[98] J. Nie, J. Yuh, E. Kardash, and T. I. Fossen, “Onboard sensor-based adaptive control of small UUVs in the very shallow water”, Proc. IFACControl Applications in Marine Systems, Fukuoka, Japan, pp. 201-206, 1998.
[99] N. Kato, “Applications of fuzzy algorithm to guidance and control of underwater vehicles”, Underwater Robotic Vehicles: Design and Control, J. Yuh (Ed.), TSI: Albuquerque, 1995.
[100] Huanan Yu, Jun Dai, “Control of autonomous underwater vehicle using fuzzy logic tuned by genetic algorithm”, Journal of Harbin Engineering University, vol. 23, no. 5, pp.12-15, 2002.
[101] F.L.Lewis, S.Jagannathan and A. Yesildirek , “Neural Network Control of Robot Manipulators and Nonlinear systems”, Taylor & Francis, 1999.
[102] Ahmad Forouzantabar, Ahmadreza Khoogar, Mohammad Javade Fakharzadegan, “Controlling a New Biped Robot Model Since Walking Using Neural Network”, IEEE ICIT Conference, March 2007, Shenzhen, China.
[103] Xiao Liang, Yong Gan, Lei Wan, “Motion Controller for Autonomous
Underwater Vehicle Based on Parallel Neural Network’’, International Journal of Digital Content Technology and its Applications, Vol 4, no 9, 2010.
[104] Ji-Hong Li, Pan-Mook Lee, Sang-Jeong Lee, “Motion control of an AUV using a neural network adaptive controller”. Proceedings of the 2002 International Symposium on Underwater Technology, pp.217- 221, 2002.
[105] Lei Zhang, Yongjie Pang, Lei Wan, and Ye Li, “Fuzzy neural network control of AUV based on IPSO Fuzzy”, IEEE International Conference on Robotics and Biomimetics, pp. 1561-1566, 2008.
[106] J. Yuh. Modeling and control of underwater robot vehicles. In IEEE Transactions on Systems, Man and Cybernetics, volume 20, pages 1475–1483, 1990.
[107] P. Ridao et al. Model identification of a low-speed UUV. In Control Applications in Marine Systems, International Federation on Automatic Control, 2001.
[108] Sanner R.M, Slotin, J.J.E, and W. LI, “Stable adaptive control of robot manipulators using “neural” networks”, Neural Computation, Volume 7, Issue 4 (July 1995) Pages: 753 - 790.
[109] Gonzalez, L.A. Design, Modeling and control of an autonomous underwater vehicle. Bachelor of Engineering Honours Thesis. The University of Western Australia. 2004.
[110] Ahmad Forouzantabar, Ahmadreza khoogar, Ahmad Reza Vali, “Neural Network Control of a New Biped Robot Model with Back Propagation Algorithm”, IEEE RO-MAN 2007, August 26-29, Korea.
[111] P. Jantapremjit and P. A. Wilson, “Guidance-control based path following for homing and docking using an autonomous underwater vehicle,” in Proceedings of the OCEANS’08 MTS/IEEE Kobe- Techno-Ocean’08 - Voyage toward the Future, OTO’08, JPN, April 2008.
[112] L. Lapierre and D. Soetanto, “Nonlinear path-following control of an AUV,” Ocean Engineering, vol. 34, no. 11-12, pp. 1734–1744, 2007.
[113] A. Adhami-Mirhosseini, M. J. Yazdanpanah, and A. P. Aguiar, “Automatic bottom-following for underwater robotic vehicles,” Automatica, vol. 50, no. 8, pp. 2155–2162, 2014.
[114] M. Kim, H. Joe, J. Kim, and S.-c. Yu, “Integral sliding mode controller for precise manoeuvring of autonomous underwater vehicle in the presence of unknown environmental disturbances,” International Journal of Control, vol. 88, no. 10, pp.2055–2065, 2015.
[115] R. Cui, X. Zhang, and D. Cui, “Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities,” Ocean Engineering, vol. 123, pp. 45–54, 2016.
[116] Y. Wang, L. Gu, M. Gao, and K. Zhu, “Multivariable output feedback adaptive terminal sliding mode control for underwater vehicles,” Asian Journal of Control, vol. 18, no. 1, pp. 247–265, 2016.
[117] X. Qi, “Adaptive coordinated tracking control of multiple autonomous underwater vehicles,” Ocean Engineering, vol. 91, pp. 84–90, 2014.
[118] R. Cui, C. Yang, Y. Li, and S. Sharma, “Adaptive Neural Network Control of AUVs With Control Input Nonlinearities Using Reinforcement Learning,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 47, no. 6, pp. 1019–1029, 2017.
[119] B. B. Miao, T. S. Li, and W. L. Luo, “A DSC and MLP based robust adaptive NN tracking control for underwater vehicle,” Neurocomputing, vol. 111, pp. 184–189, 2013.
[120] Y.C. Liu, S.Y. Liu, and N. Wang, “Fully-tuned fuzzy neural network based robust adaptive tracking control of unmanned underwater vehicle with thruster dynamics,” Neurocomputing, vol. 196, pp. 1–13, 2016.
[121] J. Ghommam and M. Saad, “Backstepping-based cooperative and adaptive tracking control design for a group of underactuated AUVs