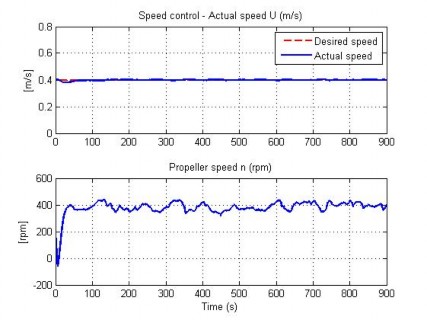
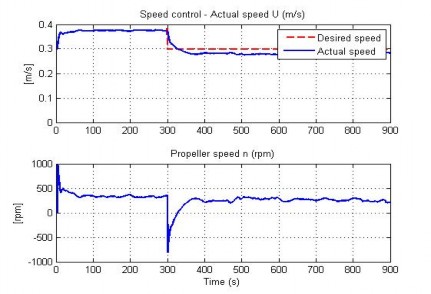
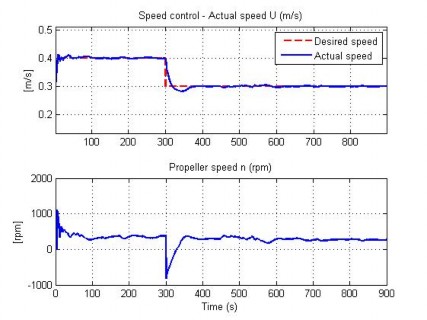
Hình 4.58 Đáp ứng tốc độ của AUV trong TN13
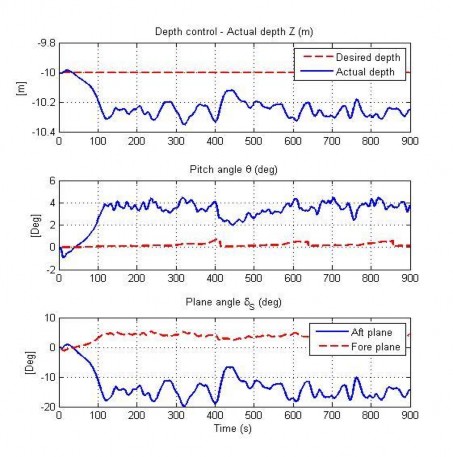
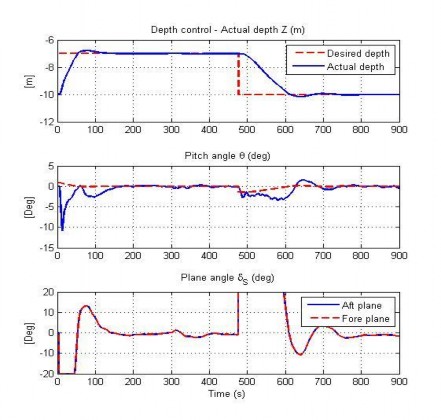
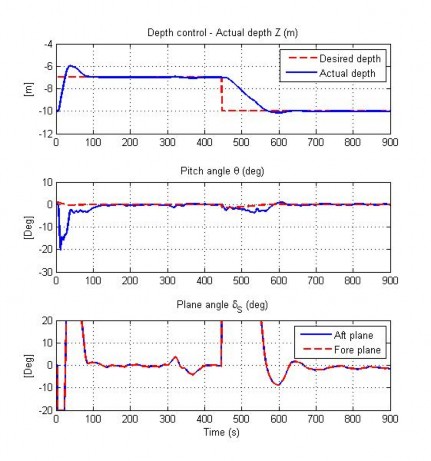
Hình 4.59 Đáp ứng độ sâu của AUV trong TN13
Có thể bạn quan tâm!
-
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5) -
 Đáp Ứng Độ Sâu Của Auv Trong Tn7
Đáp Ứng Độ Sâu Của Auv Trong Tn7 -
 Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ) -
 Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 18
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 18
Xem toàn bộ 169 trang tài liệu này.
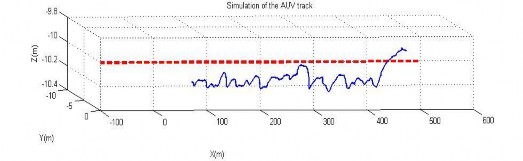
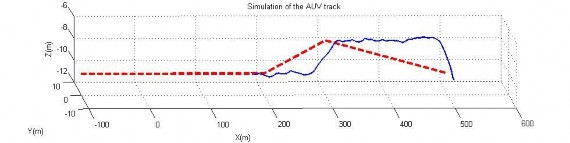
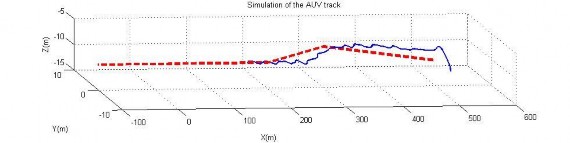
Hình 4.60 Quỹ đạo chuyển động của AUV trong TN13
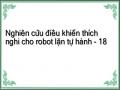
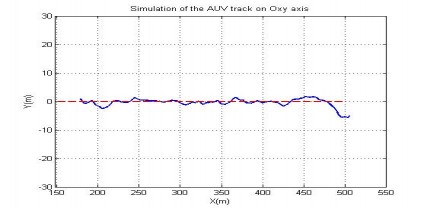
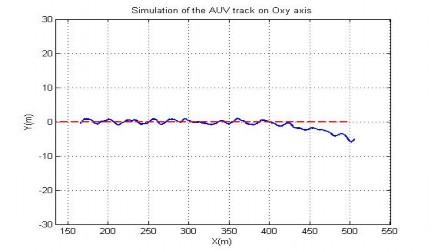
Hình 4.61 Quỹ đạo trên mặt phẳng ngang của AUV trong TN13
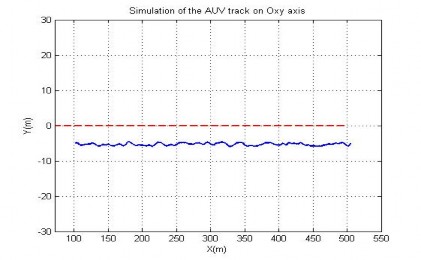
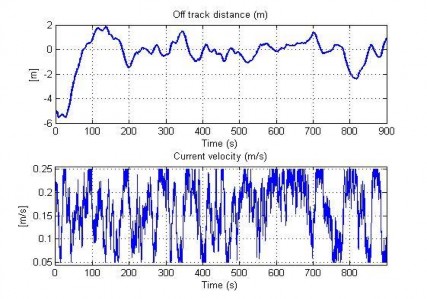
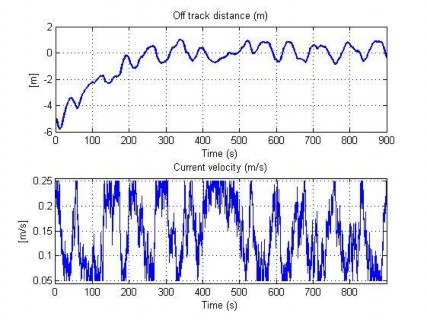
Hình 4.62 Khoảng cách dạt của AUV và vận tốc dòng chảy trong TN13
Trong tình huống này tồn tại độ dạt ngang khoảng 5m so với đường đi mong muốn. Tác giả dùng công thức tính độ dạt này và đưa vào hàm mục tiêu của BĐK NNC cho hướng đi AUV. Kết quả được kiểm tra trong Thí nghiệm 14.
4.4.2 Điều khiển AUV thích nghi với tác động của dòng chảy
- Thí nghiệm 14: Mô phỏng điều khiển AUV bám theo đường thẳng có tính đến độ dạt khỏi đường đi trong thuật toán điều khiển NNC.
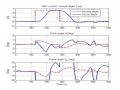
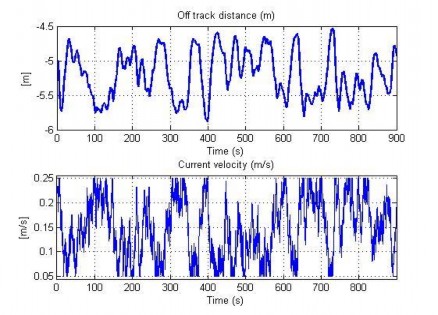
Hình 4.63 Đáp ứng hướng đi của AUV trong TN14
Hình 4.64 Đáp ứng tốc độ của AUV trong TN14
Hình 4.65 Đáp ứng độ sâu của AUV trong TN14
Hình 4.66 Qũy đạo chuyển động của AUV trong TN14
Hình 4.67 Qũy đạo trên mặt phẳng ngang của AUV trong TN14
Hình 4.68 Khoảng cách dạt của AUV và vận tốc dòng chảy trong TN14
Trên đồ thị phía trên của hình 4.64, đáp ứng tốc độ của AUV sau khi ổn định tồn tại sai số tĩnh. Để khắc phục nhược điểm này, thành phần tích phân Zk của sai số tốc độ được đưa vào hàm mục tiêu để huấn luyện mạng nơ- ron điều khiển. Kết quả mô phỏng để kiểm tra chất lượng điều khiển được thực hiện qua Thí nghiệm 15.
- Thí nghiệm 15: Mô phỏng điều khiển AUV bám theo đường thẳng có tính đến độ dạt khỏi đường đi trong thuật toán điều khiển NNC, thêm thành phần tích phân cho BĐK tốc độ.
Hình 4.69 Đáp ứng hướng đi của AUV trong TN15
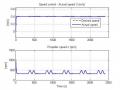
Hình 4.70 Đáp ứng tốc độ của AUV trong TN15
Hình 4.71 Đáp ứng độ sâu của AUV trong TN15
Hình 4.72 Quỹ đạo chuyển động của AUV trong TN15
Hình 4.73 Quỹ đạo trên mặt phẳng ngang của AUV trong TN15
Hình 4.74 Khoảng cách dạt trên mặt phẳng ngang trong TN15
Trên hình 4.70 đã không còn sai số tĩnh của tốc độ khi ổn định. Độ dạt ngang của AUV khỏi quỹ đạo cũng đã được loại bỏ giúp AUV bám theo quỹ đạo thẳng trên mặt phẳng ngang. Trên đồ thị 1 hình 4.71 độ vượt quá điều khiển lớn của giá trị độ sâu ở giai đoạn đầu có thể hiểu là AUV vừa thay đổi độ sâu vừa tăng tốc độ, góc chúi ngẩng lên đến 20 (đồ thị giữa của hình 4.71) đã gây nên kết quả này.
4.5 Kết luận chương 4
Ở chương 4 tác giả đã mô phỏng điều khiển bằng BĐK NNC cho các tình huống riêng biệt về hướng đi, độ sâu và tốc độ của AUV. Các BĐK làm việc hiệu quả và đạt được mục tiêu điều khiển theo giá trị đặt. Trong trường hợp hoạt động đồng thời các chuyển động của AUV, BĐK NNC thể hiện tốt khả năng điều khiển khi không có và có dòng chảy tác động lên AUV.
Cũng trong chương này tác giả đã trình bày các tình huống mô phỏng trên máy tính minh họa cho thuật toán điều khiển nơ-ron được đề xuất với các tình huống dẫn đường AUV theo quỹ đạo hình vuông, hình zig-zag khi độ sâu không đổi và khi độ sâu thay đổi; dẫn đường cho AUV bám theo địa hình đáy ở khoảng cách không đổi; dẫn đường cho AUV bám theo đường thẳng cho trước. Với mô hình phi tuyến của AUV NPS, các tình huống điều khiển trên được mô phỏng khi không có dòng chảy và khi có dòng chảy tác động. Hệ thống điều khiển đáp ứng thích nghi tốt với tác động của ngoại cảnh đến độ lệch vị trí của AUV trong mặt phẳng ngang.