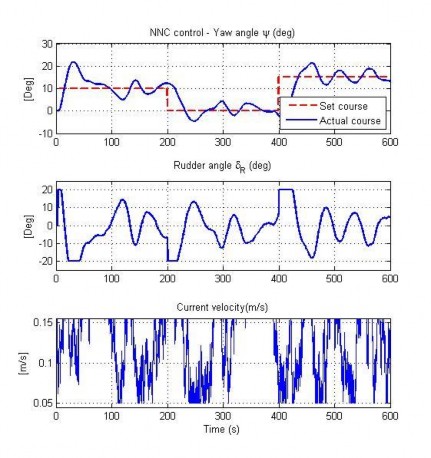
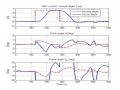
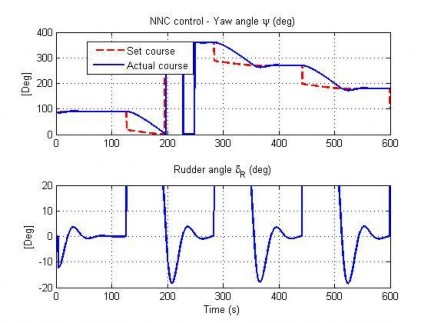
Hình 4.16 Đáp ứng hướng đi của AUV khi có dòng chảy (TN5)
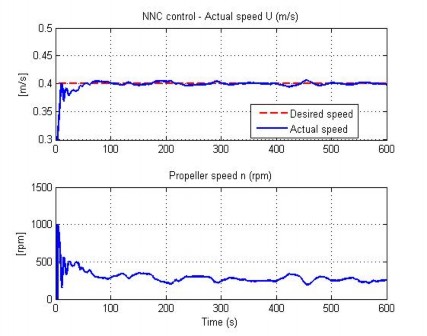
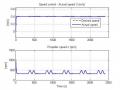
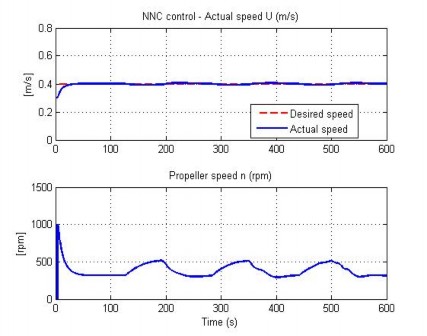
Hình 4.17 Đáp ứng tốc độ của AUV trong TN5
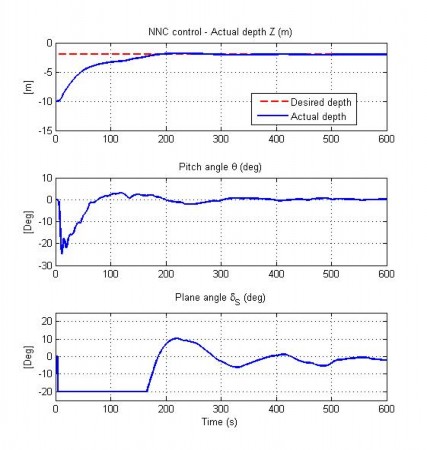
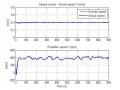
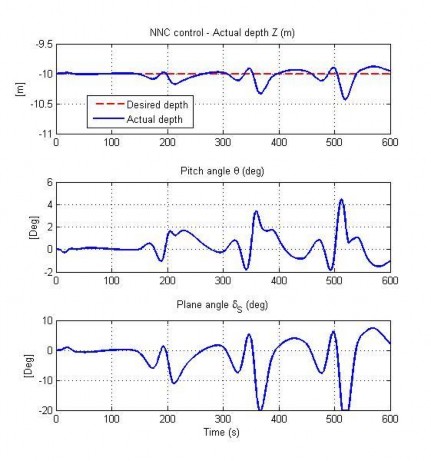
Hình 4.18 Đáp ứng độ sâu của AUV trong TN5
Có thể bạn quan tâm!
-

 Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến
Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến -
 Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv
Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv -
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3) -
 Đáp Ứng Độ Sâu Của Auv Trong Tn7
Đáp Ứng Độ Sâu Của Auv Trong Tn7 -
 Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ) -
 Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Xem toàn bộ 169 trang tài liệu này.
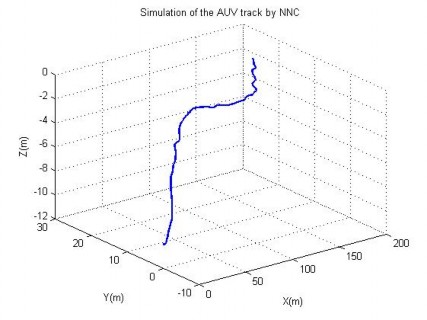
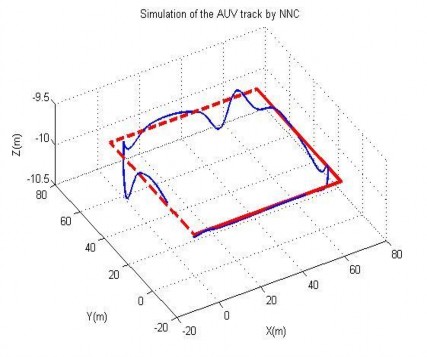
Hình 4.19 Vết chuyển động của AUV khi có dòng chảy (TN5)
Trong thí nghiệm mô phỏng này, tương tự phần trên, hướng đi thay đổi từ 0 sang 10, đến giây thứ 200 lại thay đổi về 0, sang giây thứ 400 lại thay đổi sang 15; độ sâu thay đổi từ 10m sang 2m, tốc độ tăng từ 0.3m/s lên 0.4m/s. Dòng chảy làm hướng AUV dao động tuy nhiên hướng đi, độ sâu và tốc độ vẫn đạt đến các giá trị đặt.
Nhận xét các kết quả:
Các kết quả điều khiển AUV trong chương này chưa ràng buộc AUV chuyển động theo một quỹ đạo nhất định. Hướng đi, độ sâu và tốc độ được điều khiển theo giá trị đặt. BĐK NNC được khởi tạo các giá trị ngẫu nhiên ban đầu cho các trọng số của mạng nơ-ron. Qua quá trình điều khiển, mạng nơ-ron được cập nhật các trọng số theo tiêu chí cực tiểu hóa hàm mục tiêu của từng tình huống điều khiển. Việc cập nhật này diễn ra trong từng chu trình điều khiển, được đảm bảo bởi cách thiết lập hàm mục tiêu và thuật toán tính trọng số của các lớp ẩn, lớp ra của mạng nơ-ron để tính ra được lệnh điều khiển.
Trong các phần đầu Chương 4 tác giả đã mô phỏng điều khiển bằng BĐK NNC cho các tình huống riêng biệt về hướng đi, độ sâu và tốc độ của AUV. Các BĐK làm việc hiệu quả và đạt được mục tiêu điều khiển theo giá trị đặt. Trong trường hợp hoạt động đồng thời các chuyển động của AUV, BĐK NNC thể hiện tốt khả năng điều khiển khi không có và có dòng chảy tác động lên AUV.
Khi kết hợp với hệ thống dẫn đường, các BĐK sẽ giúp AUV chuyển động theo quỹ đạo, theo độ sâu hay theo tốc độ mong muốn hoặc đồng thời tuân theo các yêu cầu tổng hợp đó tùy vào tình huống công tác. Các phần tiếp theo sau đây của Chương 4 sẽ mô phỏng hoạt động của AUV trong một số hoạt động như vậy.
Điều khiển hoạt động của AUV ngầm dưới nước phục vụ các công việc đặt ra một nhiệm vụ khó khăn, phức tạp. Không những hệ động lực của AUV phải mạnh, hiệu quả, các cảm biến tốc độ, độ sâu, khoảng cách, vị trí phải
chính xác mà thuật toán điều khiển cũng phải bền vững, hệ thống dẫn đường phải chính xác, tin cậy đạt hiệu quả cao.
Trong Chương 3 tác giả đề xuất kết hợp hệ thống dẫn đường LOS với BĐK hướng đi AUV để dẫn đường theo quỹ đạo, đồng thời điều khiển độ sâu và tốc độ AUV theo giá trị mong muốn. Đề tài chỉ giới hạn nghiên cứu đề xuất hệ thống dẫn đường AUV đi theo các điểm chuyển hướng mà quãng đường giữa các điểm là thẳng. Các yêu cầu điều khiển và hiệu chỉnh nâng cao chất lượng điều khiển như đưa khoảng cách dạt khỏi đường đi trong mặt phẳng ngang vào hàm mục tiêu BĐK hướng (phương trình 3.68), thành phần tích phân sai số tốc độ Zk vào hàm mục tiêu BĐK tốc độ (phương trình 3.47) đã giúp nâng cao chất lượng điều khiển, đạt được khả năng thích nghi với tác động ngoại cảnh lên AUV và tính phi tuyến của động học AUV khi diễn ra đồng thời các chuyển động trong 6 bậc tự do. Phần tiếp theo tác giả sẽ trình bày kết quả các thí nghiệm mô phỏng minh họa cho hệ thống điều khiển dẫn đường đã đề xuất trong Chương 3.
4.3 Mô phỏng điều khiển dẫn đường AUV và thực hiện các nhiệm vụ dưới nước
Tình huống trong phần 4.3 của chương này gồm các mô-đun sau: submarine.m: là file chương trình mô phỏng chính. npsauv.m: là file mô hình toán học AUV.
CurrGen.m: là file tạo ra tác động của dòng chảy lên AUV.
annaiTrain.m: là file chương trình huấn luyện mạng nơ-ron điều khiển theo thuật toán thích nghi tương tác.
mlnnc.m: là file mạng nơ-ron tạo ra các tham số điều khiển. LOSguide.m: là file tính hướng đi LOS cho AUV. offtrackdist.m: là file tính khoảng cách lệch khỏi đường đi trên mặt
phẳng ngang của AUV.
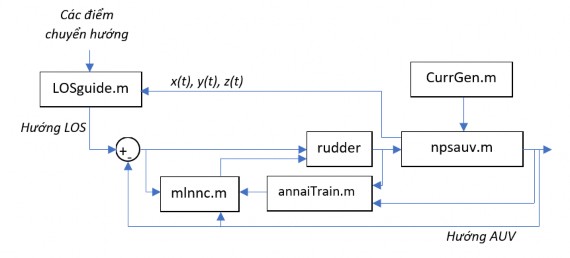
Hình 4.20 Mô phỏng hệ thống điều khiển và dẫn đường AUV
Trong phần này tác giả mô phỏng những tình huống sau đây:
- Thí nghiệm 6: Điều khiển AUV chuyển động theo quỹ đạo hình vuông, độ sâu không đổi, không có dòng chảy tác động.
- Thí nghiệm 7: Điều khiển AUV chuyển động theo quỹ đạo hình vuông, độ sâu thay đổi, không có dòng chảy tác động.
- Thí nghiệm 8: Điều khiển AUV theo quỹ đạo zig-zag khi không có dòng chảy tác động, độ sâu không đổi.
- Thí nghiệm 9: Điều khiển AUV theo quỹ đạo zig-zag khi có dòng chảy tác động, độ sâu không đổi.
- Thí nghiệm 10: Mô phỏng điều động zig-zag khi tính đến độ lệch khỏi đường đi theo mặt phẳng ngang.
- Thí nghiệm 11: Mô phỏng điều động zig-zag khi tính đến độ lệch khỏi đường đi theo mặt phẳng ngang, có dòng chảy tác động.
4.3.1 Điều khiển AUV theo quỹ đạo đặt trước
- Thí nghiệm 6: Điều khiển AUV chuyển động theo quỹ đạo hình vuông, độ sâu không đổi, không có dòng chảy tác động.
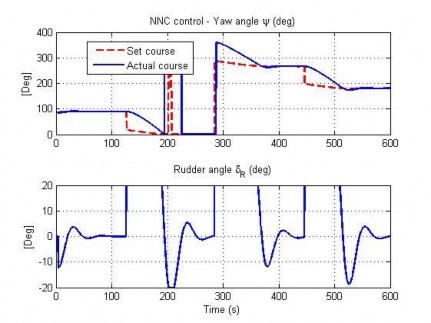
Đồ thị phía trên của hình 4.21 là hướng đi thực tế của AUV (nét liền, xanh) và hướng đi mong muốn (nét đứt, đỏ). Hướng đi mong muốn được thuật toán dẫn đường tính toán tự động. BĐK NNC làm cho hướng đi thực tế bám
theo giá trị hướng đi mong muốn này và do đó, AUV chuyển động theo quỹ đạo hình vuông mong muốn.
Hình 4.21 Đáp ứng hướng đi của AUV trong TN6
Hình 4.22 Đáp ứng độ sâu trong TN6
Hình 4.23 Đáp ứng tốc độ trong TN6
Hình 4.24 Vết chuyển động của AUV trong TN6
Hình 4.21 và 4.22 cho thấy tác động qua lại phức tạp của hướng đi và độ sâu khi AUV chuyển hướng. Độ sâu AUV dao động mỗi khi nó chuyển sang hướng đi mới tại góc vuông của quỹ đạo.
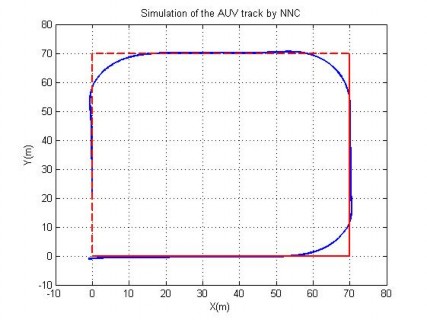
Hình 4.25 Quỹ đạo trên mặt phẳng ngang của AUV trong TN6
- Thí nghiệm 7: Điều khiển AUV chuyển động theo quỹ đạo hình vuông, độ sâu thay đổi, không có dòng chảy tác động.
Hình 4.26 Đáp ứng hướng đi của AUV trong TN7