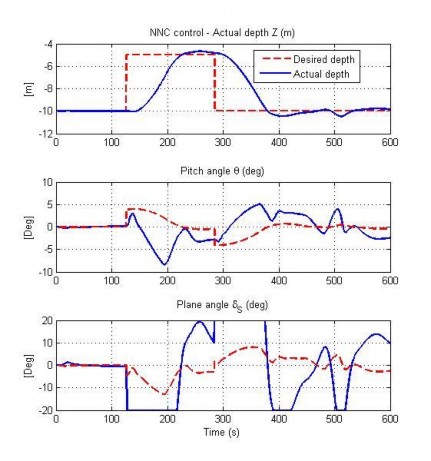
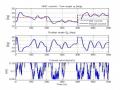
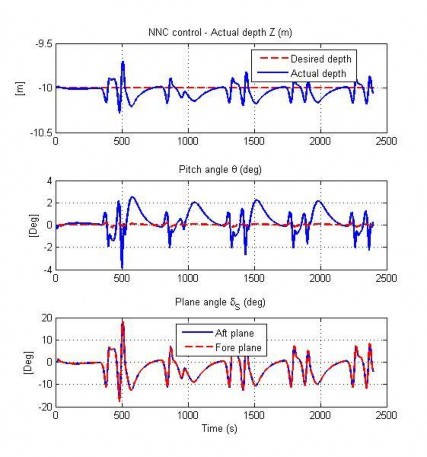
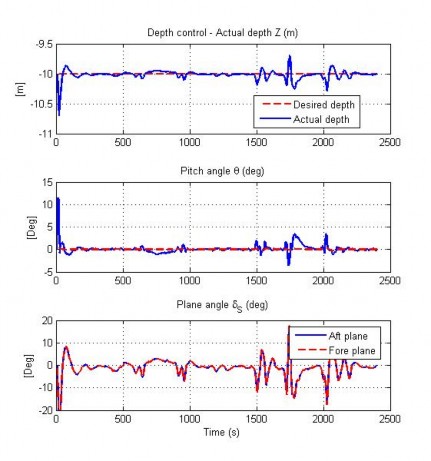
Hình 4.27 Đáp ứng độ sâu của AUV trong TN7
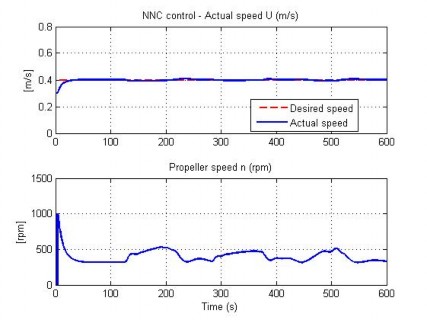
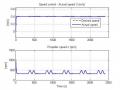
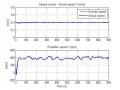
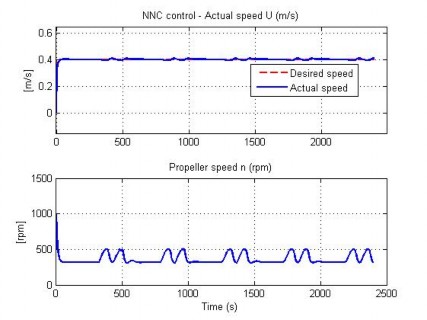
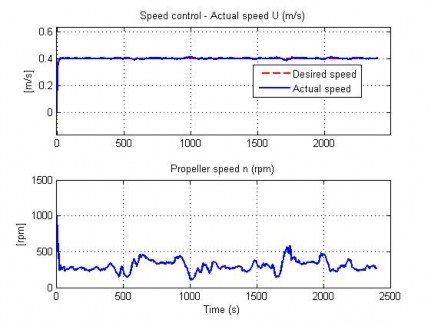
Hình 4.28 Đáp ứng tốc độ của AUV trong TN7
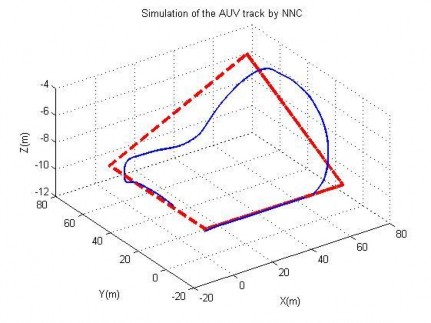
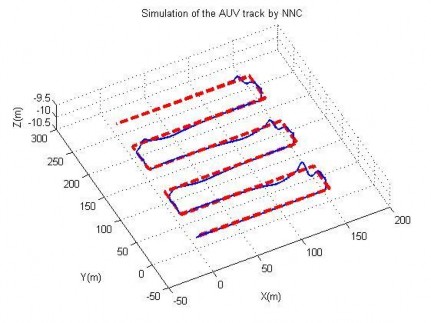
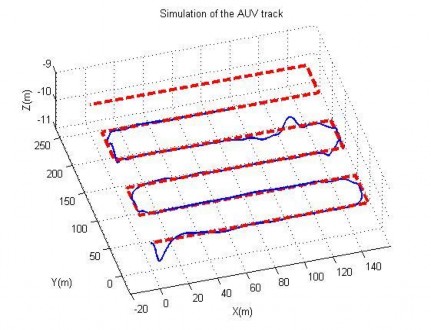
Hình 4.29 Quỹ đạo chuyển động của AUV trong TN7
Có thể bạn quan tâm!
-

 Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv
Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv -
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn3) -
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5) -
 Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ) -
 Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13 -
 Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Xem toàn bộ 169 trang tài liệu này.
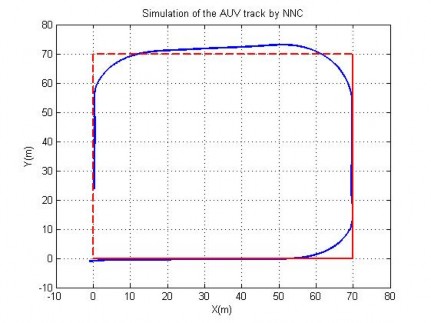
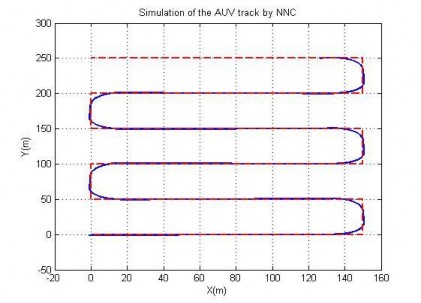
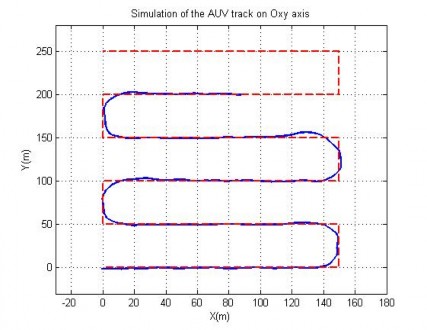
Hình 4.30 Quỹ đạo trên mặt phẳng ngang của AUV trong TN7
Trong thí nghiệm mô phỏng này, độ sâu của điểm chuyển hướng thứ 3 giảm từ 10m về 3m. Cánh điều khiển phía trước được điều khiển bởi một BĐK PD với hệ số khuếch đại tỉ lệ nhỏ để hỗ trợ. Trên từng đoạn của quỹ đạo, AUV bám theo đường đi ở mặt phẳng ngang và ở phương độ sâu, giá trị độ sâu đạt được như mong muốn.
- Thí nghiệm 8: Điều khiển AUV theo quỹ đạo zig-zag khi không có dòng chảy tác động, độ sâu không đổi.
Hình 4.31 Đáp ứng hướng đi của AUV trong TN8
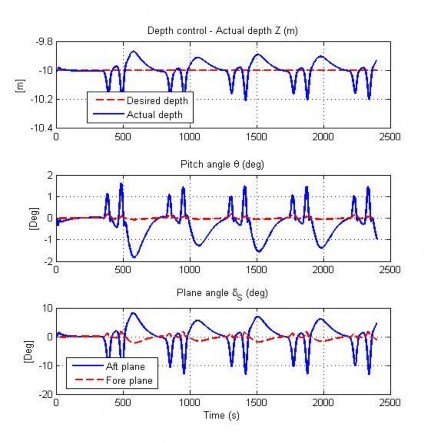
Hình 4.32 Đáp ứng độ sâu của AUV trong TN8
Hình 4.33 Đáp ứng tốc độ của AUV trong TN8
Hình 4.34 Quỹ đạo chuyển động của AUV trong TN8
Đây là hoạt động khá phức tạp của AUV khi quỹ đạo chuyển động là đường zig-zag tạo bởi các đoạn vuông góc trong hoạt động khảo sát đáy biển hoặc tìm kiếm cứu nạn, thăm dò,… (hình 4.34).
Hình 4.35 Quỹ đạo của AUV trên mặt phẳng ngang trong TN8
Hướng đi mong muốn trên từng đoạn có thể là LOS, hướng dọc theo đoạn quỹ đạo hiện thời (từ điểm đầu đến điểm cuối đoạn đường hiện thời), hoặc hướng từ vị trí hiện tại của AUV tới điểm chuyển hướng hiện tại phía trước. Trong trường hợp này hướng LOS được chọn. BĐK NNC được dùng cho cả bánh lái hướng và cánh điều khiển độ sâu phía trước và sau của NPS AUV II.
- Thí nghiệm 9: Điều khiển AUV theo quỹ đạo zig-zag khi có dòng chảy tác động, độ sâu không đổi.
Hình 4.36 Đáp ứng hướng đi của AUV trong TN9
Hình 4.37 Đáp ứng tốc độ của AUV trong TN9
Hình 4.38 Đáp ứng độ sâu của AUV trong TN9
Hình 4.39 Quỹ đạo chuyển động của AUV trong TN9
Hình 4.40 Quỹ đạo của AUV trên mặt phẳng ngang trong TN9
Trong Thí nghiệm 9 dòng chảy tác động làm hướng và vị trí AUV dịch chuyển và dao động. Độ sâu cũng dao động nhưng vẫn đảm bảo trên mặt phẳng ngang.
- Thí nghiệm 10: Mô phỏng điều động zig-zag khi tính đến độ lệch khỏi đường đi theo mặt phẳng ngang.
Hình 4.41 Đáp ứng hướng đi của AUV trong TN10
Hình 4.42 Đáp ứng độ sâu của AUV trong TN10