- Thí nghiệm 3: Mô phỏng điều khiển hướng đi và độ sâu AUV khí dòng chảy tác động.
- Thí nghiệm 4: Mô phỏng điều khiển tổng hợp hướng đi, độ sâu và tốc độ AUV.
- Thí nghiệm 5: Mô phỏng điều khiển tổng hợp hướng đi, độ sâu và tốc độ AUV khi có dòng chảy tác động.
4.2.1 Điều khiển hướng
- Thí nghiệm 1: Mô phỏng điều khiển riêng hướng đi AUV và so sánh với BĐK PID đơn giản.
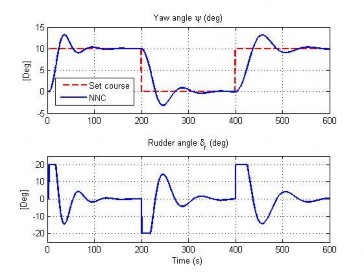
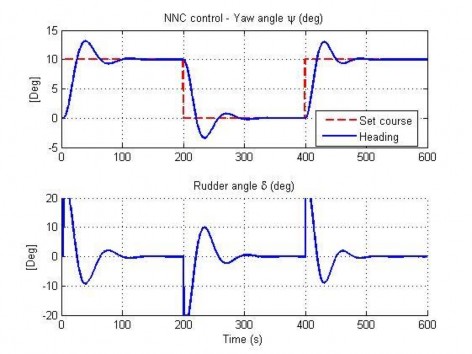
Hình 4.2 Đáp ứng hướng đi của BĐK NNC
Có thể bạn quan tâm!
-

 Wij O J I , (3.29)
Wij O J I , (3.29) -
 Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến
Mô Hình Tổng Quát Của Bộ Điều Khiển Nnc Huấn Luyện Trực Tuyến -
 Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv
Các Phương Án Thích Nghi Cho Hệ Thống Điều Khiển Auv -
 Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5)
Đáp Ứng Hướng Đi Của Auv Khi Có Dòng Chảy (Tn5) -
 Đáp Ứng Độ Sâu Của Auv Trong Tn7
Đáp Ứng Độ Sâu Của Auv Trong Tn7 -
 Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Độ Sâu Thực Tế Của Auv (Nét Liền, Xanh) Và Đáy (Nét Đứt, Đỏ)
Xem toàn bộ 169 trang tài liệu này.
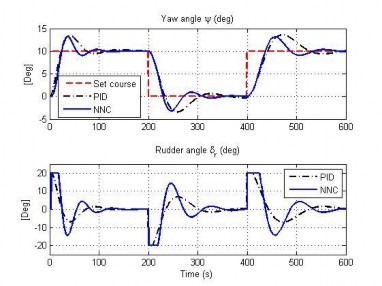
Hình 4.3 Đáp ứng hướng đi của BĐK NNC và PID
Với BĐK nơ-ron đề xuất ở hình 3.6 hướng đi của AUV được điều khiển thể hiện trên hình 4.2. Đồ thị trên phía trên là đáp hướng hướng đi của AUV (nét xanh liền) đối với hướng đi mong muốn (nét đỏ đứt). Đồ thị phía dưới hình 4.2 là góc bánh lái hướng của AUV theo thời gian.
Hình 4.3 so sánh hoạt động của BĐK PID và BĐK NNC. Trong thí nghiệm mô phỏng này hướng đi thay đổi 10 độ cho cả 2 trường hợp BĐK PID và NNC. Ở đồ thị phía trên của hình 4.3, hướng đi của BĐK NNC có thời gian xác lập nhỏ hơn và ổn định hướng nhanh hơn, độ quá điều khiển cũng nhỏ hơn so với BĐK PID. Ở đồ thị phía dưới là góc bánh lái của AUV khi được điều khiển bằng BĐK NNC (nét liền) và BĐK PID (nét gạch chấm). Nét liền thể hiện bánh lái hoạt động tích cực hơn để đạt được chất lượng điều khiển tốt hơn ở đồ thị phía trên.
4.2.2 Điều khiển hướng, độ sâu và góc chúi
- Thí nghiệm 2: Mô phỏng điều khiển độ sâu AUV.
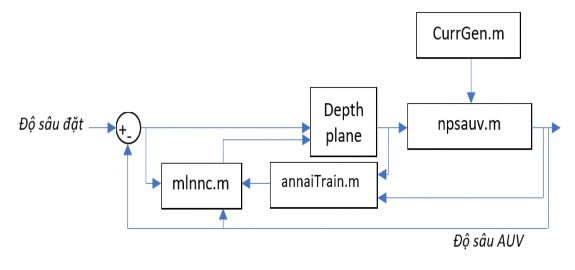
Hình 4.4 Sơ đồ mô phỏng điều khiển độ sâu AUV
Hình 4.5 Đáp ứng hướng đi của AUV trong TN2
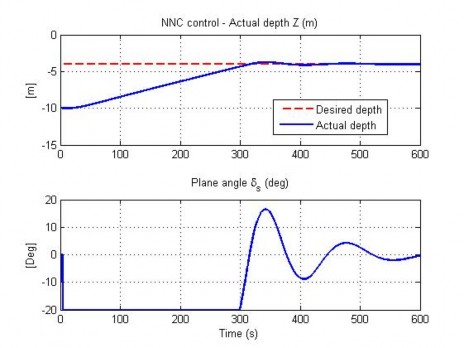
Hình 4.6 Đáp ứng độ sâu của AUV trong TN2
Hình 4.7 Quỹ đạo chuyển động của AUV trong TN2
Trong thí nghiệm mô phỏng này hướng đi thay đổi 10 độ, độ sâu thay đổi từ 10m sang 4m. Độ sâu được điều khiển bởi BĐK nơ-ron đề xuất ở hình
3.7. Bánh lái độ sâu có giới hạn 20. Độ sâu AUV đạt giá trị mong muốn 4m ở thời điểm 315 giây.
- Thí nghiệm 3: Mô phỏng điều khiển hướng đi và độ sâu AUV khi dòng chảy tác động.
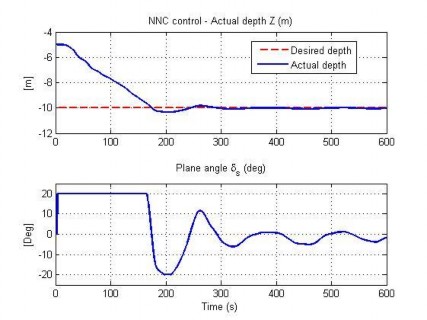
Hình 4.8 Đáp ứng độ sâu của AUV khi có dòng chảy (TN3)
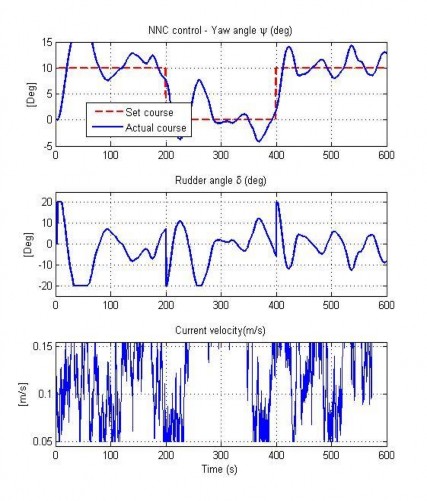
Hình 4.9 Đáp ứng hướng đi của AUV khi có dòng chảy (TN3)
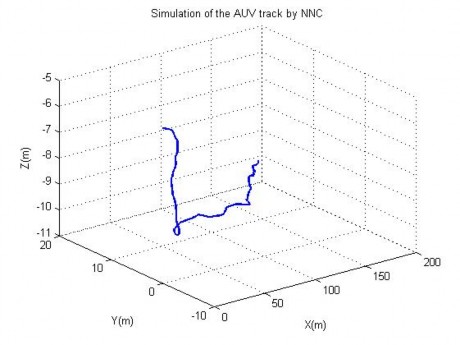
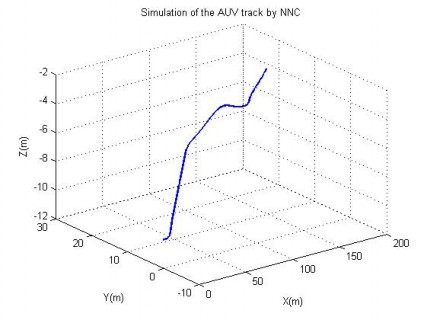
Hình 4.10 Vết chuyển động của AUV khi có dòng chảy (TN3)
Giả định về dòng chảy: Trong thực tế, khu vực làm việc của AUV không quá lớn, thời gian làm việc không quá dài, nên dòng chảy trong đó có thể coi là ổn định về hướng trong khoảng thời gian hoạt động của AUV. Vì vậy tham số dòng chảy sử dụng trong mô phỏng có hướng 110, tốc độ thay đổi trong khoảng 0.05 m/s đến 0.16 m/s (đồ thị dưới cùng trên hình 4.9). Trong thí nghiệm mô phỏng này hướng đi thay đổi 10, độ sâu thay đổi từ 5m sang 10m. AUV đạt độ sau 10m sau thời gian 175 giây và ổn định dần về độ sâu này.
4.2.3 Điều khiển hướng đi, độ sâu và tốc độ
- Thí nghiệm 4: Mô phỏng điều khiển tổng hợp hướng đi, độ sâu và tốc độ AUV.
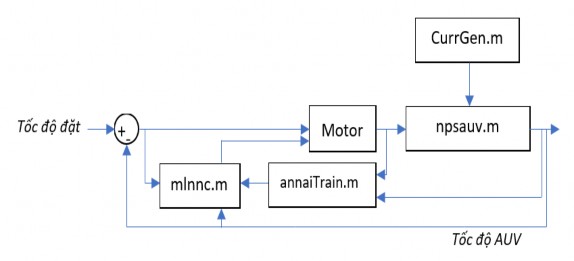
Hình 4.11 Sơ đồ mô phỏng điều khiển tốc độ AUV
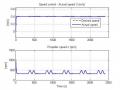
Trong thí nghiệm mô phỏng này hướng đi thay đổi từ 0 sang 10, đến giây thứ 200 lại thay đổi về 0, sang giây thứ 400 lại thay đổi sang 15; độ sâu thay đổi từ 10m sang 2m, tốc độ tăng từ 0.3m/s lên 0.4m/s. BĐK thực hiện điều khiển tốt hướng đi, độ sâu và tốc độ AUV đến điểm đặt mong muốn.
Trường hợp này AUV hoạt động trong điều khiện không có tác động của dòng chảy.
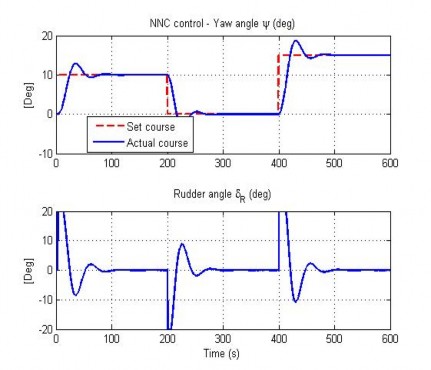
Hình 4.12 Đáp ứng hướng đi của AUV trong TN4
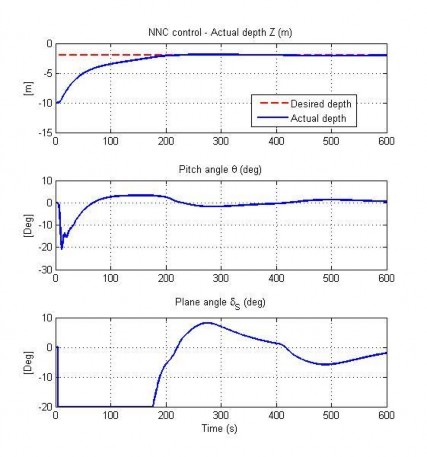
Hình 4.13 Đáp ứng độ sâu của AUV trong TN4
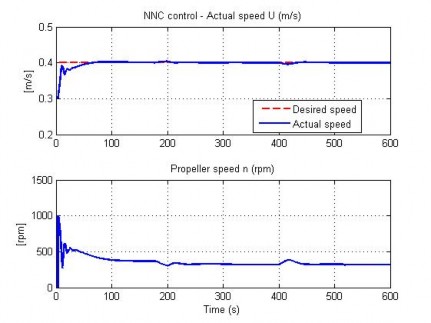
Hình 4.14 Đáp ứng tốc độ của AUV trong TN4
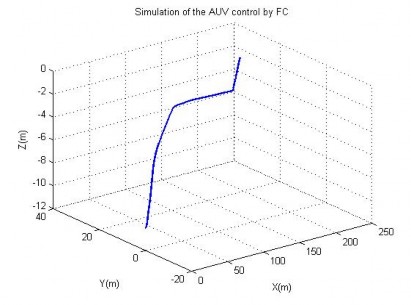
Hình 4.15 Vết chuyển động của AUV
4.2.4 Điều khiển tổng hợp các chuyển động khi có dòng chảy
- Thí nghiệm 5: Mô phỏng điều khiển tổng hợp hướng đi, độ sâu và tốc độ AUV khi có dòng chảy tác động.