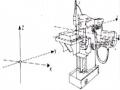
Điểm chuẩn : Là điểm gốc 0 của hệ tọa độ máy.
Điểm 0 chi tiết : Là điểm gốc 0 của hệ tọa độ chi tiết, nó được giữ cố định cho một chi tiết.
Điểm 0 lập trình : Là điểm gốc 0 từ đó xác định các dữ liệu cập nhật trong một chương trình. Điểm này có thể thay đổi thông qua lệch dịch chuyển điểm 0.
IV _ CÁC DẠNG ĐIỀU KHIỂN
Phù hợp với yêu cầu đa dạng trong thực tế, người ta phân biệt hệ điều khiển
Y
y
2
B
y
A
1
X
x
1
x
2
theo ba mức điều khiển khác nhau :
- Điều khiển theo điểm.
- Điều khiển theo đoạn.
- Điều khiển theo đường.
1. Điều khiển theo điểm:
Hình 13: Sơ đồ điều khiển theo điểm
Là hệ
thống điều khiển không có mối
chính xác mũi khoan hoặc chi tiết vào ví
quan hệ hàm số (vô hàm) giữa các chuyển động dọc theo trục tọa độ. Nhiệm vụ chủ
trí yêu cầu. Hệ thống này không kiểm tra theo qũi đạo, vận tốc, mà kiểm tra
yếu của hệ
thống điều khiển là định vị
theo vị trí định vị.
Điển hình nhất của hệ thống này là điều khiển để khoan lỗ tức là cần điều khiển chuyển động tương đối giữa dao và phôi đến từng điểm xác định. Chẳng hạn từ điểm A(X1,Y1 ), B(X2,Y2 ). Đặc điểm của loại điều khiển này là trong quá trình điều khiển mũi khoan không làm việc. Quá trình gia công chỉ được tiến hành theo bất cứ tọa độ nào: Có thể trước tiên theo tọa độ X, sau đó theo Y hoặc ngược lại, hoặc đồng thời thực hiện cùng một lúc trên hai trục với vận tốc lớn nhất .
2. Điều khiểu theo đoạn :
Cũng giống như hệ
thống điều
theo một đường bất kỳ, mà thông
khiển theo điểm, tức là không có quan hệ hàm số giữa các chuyển động theo tọa độ. Điểm khác là khi định vị, mũi khoan làm việc nên không thể định vị
thường phải theo hướng song song với một trục tọa độ.
Thí dụ :
Khi khoan cạnh song song với trục tọa độ được xác định bởi các điểm (X1,Y1) và (X2,Y2) thì phải di động bàn máy (hoặc mũi khoan) theo tọa độ Y. Trong lúc đó bàn trượt theo hướng X phải đứng yên. Chỉ sau khi khoan xong các điểm song song với trục Y rồi mới tiến hành định vị các điểm song song với trục X.
Cấu trúc cơ bản của hệ thống điều khiển theo điểm và theo đoạn không khác nhau. Do đó, ta có thể thực hiện hệ thống này theo sơ đồ sau.
Sơ đồ cấu trúc hệ thống điều khiển theo điểm và đoạn khởi đầu bằng các số liệu về hình dáng và số liệu công nghệ chi tiết gia công. Hai số liệu ấy tạo thành dữ liệu gia công. Thông qua quá trình lập trình, nhờ cơ cấu ghi mã hiệu, các dữ liệu gia công được biến thành các mã hiệu ghi vào chương trình. Chương trình này bao gồm tất cả mọi tín hiệu cần thiết cho việc điều khiển các cơ cấu của máy.
Những khâu kể trên có thể thực hiện ở bất cứ nơi nào, tách xa khởi máy, nên gọi là phần xử lý dữ liệu bên ngồi. Dữ liệu gia công cũng có thể đưa trực tiếp vào bảng điều khiển số đặt trên máy (như máy NC đơn giản) hoặc truy nhập trực tiếp vào máy tính trung tâm như ở hệ thống CNC. Các khâu kế tiếp của xích điều khiển điều đặt bên trong máy, nên gọi là phần xử lý dữ liệu bên trong.
Khâu đầu tiên của phần xử lý dữ liệu bên trong là cơ cấu đọc. Vì chương trình ghi các dữ liệu gia công dưới dạng mã hiệu, nên phải qua cơ cấu giải mã để biến mã hiệu thành những tín hiệu điều khiển: Tín hiệu hành trình và tín hiệu khởi động.
Tín hiệu khởi động có nhiệm vụ đóng ngắt các cơ cấu tác động, nên ta không đề cập đến trong sơ đồ cấu trúc. Còn tín hiệu hành trình là những trị số đã được xác định để định vị bàn máy theo tọa độ XY. Tín hiệu hành trình cần đưa qua cơ cấu chuyển đổi, nhằm tạo nên những tín hiệu giống nhau để đưa vào cơ cấu so sánh.
Cơ cấu so sánh có hai tín hiệu vào: một tín hiệu là những trị số xác định từ
Y
y
2
y
1
X
x
1
x
2
Hình 14: Sơ đồ điều khiển theo đoạn
chương trình đưa đến gọi là giá trị cần, một tín hiệu là những trị số thực tế từ thiết bị đo hành trình của bàn máy đưa đến gọi là giá trị thực. Qua cơ cấu so sánh, nếu hai gía trị chênh lệch nhau, sẽ tạo nên một tín hiệu sai lệch. Qua cơ cấu khuếch đại, tín hiệu sai
lệch làm khởi động động cơ (động cơ quay bàn máy) để bù sai số. Khi đạt đến vị trí đã định, giá trị cần và giá trị thực bằng nhau, tín hiệu sai lệch sẽ bằng không, cơ cấu khởi động dừng.
SƠ ĐỒ CẤU TRÚC
HỆ THỐNG ĐIỀU KHIỂN THEO ĐIỂM VÀ ĐOẠN
Bên ngoài
n
Bên trong
Cơ cấu đọc
ơ
g
C
ơ
r
T
ínấ
C
C
chàgn
hấu
ín hiệ u kh
ơđộ
Động cơ điều khiển
Thiết bị đo hành trình
Bàn máy
ơso
Động cơ điều khiển
khu ếc h đại
Bàn máy
X
Y
ơ
Cơ cấu khuếch đại
Xử lý dữ liệu
C
Dữ liệu gia công
Lập chương trình
Cơ cấu ghi mã hiệu hiệu
h
Số liệu hình dáng
Số liệu công nghệ
ư
t
ìc n
T
hihuệ u
ởi
ngcấ u
scáấn hu
trìãn ển h i đổi
m ã
chui y | ||
Thiết bị đo hành trình | ||
Có thể bạn quan tâm!
-
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 1
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 1 -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 2
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 2 -
 _ Khái Niệm Về Điều Khiển Theo Chương Trình Số
_ Khái Niệm Về Điều Khiển Theo Chương Trình Số -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 5
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 5 -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 6
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 6 -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 7
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 7
Xem toàn bộ 97 trang tài liệu này.
C C
Hệ thống điều khiển vừa mô tả trên là hệ thống kín. Để tạo nên hệ thống kín thông thường rất tốn kém. Vì thế, người ta đang cố gắng để tạo nên một hệ thống điều khiển đơn giản hơn.
Thí dụ như hệ thống dùng cơ cấu ngắt. Ở đây, các tín hiệu khởi động điều khiển trực tiếp các động cơ điều khiển, chứ không phải tìm hiệu số sai lệch của cơ cấu so sánh sau khi được khuếch đại. Việc so sánh tín hiệu cần với tín hiệu thực cũng được tiến hành như trên. Nhưng khi có sai lệch nó sẽ tác động động cơ ngắt, làm dừng động cơ điều khiển.
CHƯƠNG II
TRUYỀN ĐỘNG BẰNG
ĐỘNG CƠ BƯỚC
I _ CẤU TẠO VÀ PHÂN LOẠI ĐỘNG CƠ BƯỚC
Động cơ bước được phân thành ba loại chủ yếu sau :
1. Động cơ nam châm vĩnh cửu : Hay còn gọi là động cơ bước kiểu tác dụng và thường được chế tạo có cực móng. Động cơ này có góc bước thay đổi từ 60 450
trong chế độ điều khiển bước đủ, mômen hãm từ
0,5
25 Ncm, tần số khởi động
lớn nhất là 0,5 và tần số làm việc lớn nhất ở chế độ không tải là 5 Khz.
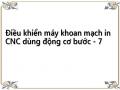
Hình 21: Cấu tạo động cơ bước vĩnh cửu
1 và 2) Hai nửa Stator có dạng cực móng được từ hóa với cực N và S xen kẻ nhau; 3) Hai cuộn stato (một cuộn điều khiển đơn cực và một cuộn điều khiển lưỡng cực) được đặt ở bên trong hai nửa stator; 4)Rotor nam châm vĩnh cửu có các cực từ xen kẻ.
2. Động cơ bước có từ trở thay đổi : Hay còn gọi là động cơ phản kháng. Kiểu động cơ này có góc nằm trong giới hạn từ 1,80 300 trong chế độ điều khiển bước đủ,
mômen hãm từ 1 50 Ncm, tần số khởi động lớn nhất là 1 Khz, và tần số làm việc
lớn nhất trong điều kiện không tải là 20 Khz. Stato được chế tạo thành dạng răng
với bước cực s. Cuộn dây pha (2) được quấn trên 2 hoặc 4 răng đối xứng nhau,
roto của động cơ cũng được chế tạo thành dạng răng có bước cực r.
C
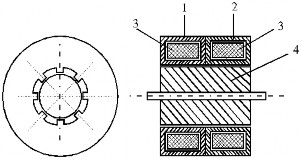
Hình 22 :Cấu tạo động cơ bước có từ trở thay đổi
1) Stato được chế tạo thành dạng răng; 2) Cuộn dây pha; 3) Roto có từ trữ thay đổi được chế tạo thành dạng răng.
3. Động cơ bước hổn hợp :
Hay còn gọi là động cơ
bước
cảm ứng, có góc bước thay đổi trong
khoảng 0,36 150 trong chế độ bước đủ,
mômen hãm từ 3 1000 Ncm, tần số
khởi động lớn nhất là 40 khz. Trong các loại động cơ bước kể trên thì động cơ bước hổn hợp được sử dụng nhiều hơn cả. Vì loại động cơ này kết hợp các ưu
điểm của hai loại động cơ trên đó là:
Động cơ nam châm vĩnh Cửu với dạng
cực móng, và động cơ có từ
trở thay đổi.
c/vòng
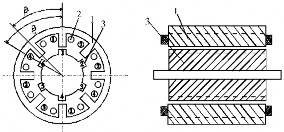
Cấu tạo của động cơ bước thay đổi hổn hợp là sự kết hợp giữa động cơ bước nam châm vĩnh cữu và động cơ bước có từ trở thay đổi. Phần Stato được cấu tạo hồn tồn giống Stator của động cơ bước có từ trở thay đổi. Trên các cực của Stato được đặt các cuộn dây pha, mỗi cuộn dây pha được quấn thành 4 cuộn dây (h.23) hoặc được quấn thành 2 cuộn dây (h.24) đặt xen kẻ nhau để hình thành lên các cực N và S đồng thời đối diện với mỗi cực của bối dây là răng của Roto và cũng được đặt xen kẽ giữa hai vành răng số 3 của Roto.
Động cơ hổn hợp cũng được chế tạo với 2, 4 và 5 pha, động cơ 2 và 4 pha thường cho góc bước từ s = 0,90 150 cò động cơ 5 pha thường có có góc bước từ s = 0,180 0,270 .
Bước răng của Roto được xác định bằng biểu thức sau:
2
r Zr
3600
Zr
Trong đó: Zr là số răng của Roto
C
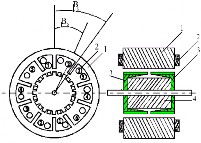
Quá trình điều khiển bước đủ.
1) Hai pha điều khiển lưỡng cực
2) Stator dạng răng.
3) Cuộn dây pha điều khiển lưỡng cực.
4) Hai vành răng ngồi của rotor. Nam châm vĩnh cửu được
Hình 24: Cấu tạo động c
Góc bước của động cơ là tỷ số giữa bước răng dây được điều khiển lưỡng cực :
r
r và số pha m của động cơ khi cuộn
s m
Động cơ hổn hợp có tần số bước và độ phân giải cao, có mômen quay và mômen hãm lớn.
Trong chế tạo động cơ bước ngồi ba loại chính kể trên, để có góc bước thay rất nhỏ người ta còn chế tạo động cơ bước từ trở thay đổi có nhiều tầng, kết cấu của loại này được trình bày ở hình .
![]()
Loại động cơ này thường được chế tạo 2, 3, 4 tầng trình bầy kết cấu của động
cơ bước từ
trở
thay đổi có ba tầng.
Trong mỗi tầng số răng của Stato và
Roto giống nhau. Vị trí răng của 3 Stato
được đặt giống nhau và được cố định
trên trục Roto, nhưng vị trí răng của 3 Stato được đặt lệch nhau 1/3 bước răng.
Góc lệch giữa hai tầng kề xác định bằng biểu thức sau:
nhau được
Trang
C
Nếu Roto có Zr = 12 răng thì góc lệch nhau giữa hai tầng kề nhau là 100
Khi có một xung dòng điện điều khiển đặt vào tầng 1 thì răng của Roto và Stato đối đỉnh nhau (vì từ thông chỉ khép kín tại vị trí có từ trở nhỏ nhất). Lúc này răng của Roto và Stato ở tầng 2 lệch nhau 1 góc là 100, còn răng của Roto và Stato ở tầng 3 lệch nhau là 200. Cắt xung dòng điện điều khiển vào tầng 1 và các xung dòng điện điều khiển vào tầng thì Roto của tầng 2 quay một góc 100 để đỉnh răng của Roto trùng với đỉnh răng của stato ở tầng 2, lúc này răng của Roto và Stato của tầng 3 lệch nhau một góc là 100 so với tầng 2. Quá trình điều khiển tiếp tục cho tới khi trở lại tầng 1. Cuối cùng ta có quá trình
điều khiển theo trình tự 1231
II _ ĐẶC ĐIỂM CHUNG CỦA ĐỘNG CƠ BƯỚC
Động cơ bước thực chất là động cơ đồng bộ hoạt động dưới tác dụng của các xung rời rạc và kế tiếp nhau. Khi một xung dòng điện hoặc điện áp đặt vào cuộn dây phần ứng của động cơ bước, thì roto (phần cảm) của động cơ sẽ quay đi một góc nhất định, và được gọi là bước của động cơ, khi các xung dòng điện đặt vào cuộn dây phần ứng liên tục thì roto sẽ quay liên tục.
Vị trí của trục động cơ bước được xác bằng số lượng xung, và vận
tốc của động cơ
tỷ lệ
với tần số
xung, và được xác định bằng số
bước/giây (second). Tính năng làm việc của động cơ bước được đặt trưng bởi bước được thực hiện, đặt tính góc (quan hệ của mômen điện từ theo gốc giữa trục của Roto và trục của từ trường tổng), tần số xung giới hạn sao cho các quá trình quá độ, khi hồn thành một bước có thể tắt đi trước khi bắt đầu bước tiếp theo. Tính năng mở máy của động cơ, được đặt trưng bởi tần số xung cực đại có thể mở máy mà không làm cho Roto mất đồng bộ (bỏ bước). Tuỳ theo kết cấu của từng loại động cơ, mà tần số động cơ có thể tiếp nhận được từ 10 đến 10.000 Khz.
Bước của động cơ (giá trị của góc giữa hai vị trí ổn định kề nhau của Roto) càng nhỏ thì độ chính xác trong điều khiển càng cao. Bước của động cơ phụ thuộc vào số cuộn dây phần ứng, số cực của Stato, số răng của Roto và phương pháp điều khiển bước đủ hoặc điều khiển nữa bước. Tùy theo yêu cầu về độ chính xác và kết cấu của động cơ, mà bước của động cơ thay đổi trong giới hạn từ 1800 0,180. Trong đó: động cơ bước nam châm vĩnh cửu dạng cực móng và có từ trở thay đổi từ 60 450, động cơ bước có từ trở thay đổi có góc bước nằm trong giới hạn từ: 1,80 300, và động cơ bước hỗn hợp có góc bước thay đổi trong khoảng 0,360 150. Các giá trị góc của các loại động cơ kể trên được tính trong chế độ điều khiển bước đủ.
Chiều quay của động cơ bước không phụ thuộc vào chiều dòng điện chạy trong các cuộn dây phần ứng, mà phụ thuộc vào thứ tự cuộn dây phần ứng được cấp xung điều khiển. Nhiệm vụ này do bộ chuyển phát thực hiện.
Số cuộn dây phần ứng (hay cò gọi là cuộn dây pha) của động cơ bước được chế tạo từ 2 5 cuộn dây pha (hay còn gọi là bối dây) và được đặt đối diện nhau trong các rãnh ở Stato. Đối với cuộn dây phải có hai cuộn dây thì chỉ dùng cho điều khiển lưỡng cực (cuộn dây có cực tính thay đổi), với 4 cuộn dây có thể dùng cho cả hai chế độ điều khiển lưỡng cực và điều khiển đơn cực.
III _ PHƯƠNG PHÁP ĐIỀU KHIỂN BƯỚC ĐỦ VÀ NỬA BƯỚC
C