1. Phương pháp điều khiển bước đủ
Thể hiện trình tự điều khiển bước đủ của dộng cơ bước nam châm vĩnh cửu được từ hóa với các cực từ xen kẽ. Nguyên lý làm việc của động cơ bước là dựa trên sự tác động tương hổ giữa từ trường của Stato và Roto, hình thành mômen điện từ làm quay Roto đi một góc nhất định. Khi cho xung dòng điện tác độngvào cuộn dây pha AA'( hình 26a) thì Roto sẽ quay đến vị trí, mà trục từ trường của Roto (cũng chính là trục dọc của Roto) trùng với trục từ trường của pha A
điện sẽ quay đi một góc là 180, do đó Roto cũng
Nếu cắt xung dòng điện vào pha A, và cho xung dòng điện tác dụng vào cuộn dây pha BB'
quay đi một góc là 180 để cho trục của từ trường Roto trùng với trục của từ trường tổng.
(h.26b) thì vectơ từ hố của dòng
Sau đó cắt xung tác động vào pha B và lại cho xung dòng điện vào pha A (hình 2 6c), nhưng đổi dấu thì Roto lai quay tiếp một góc là 180. Nếu tính từ điểm đầu thì Roto đã quay được một góc là 360.
Quá trình chuyển phát xung dòng điện tác dụng vào một trong hai pha cho tới khi Roto quay một vòng, động cơ sẽ thực hiện được 20 bước (hay còn gọi là 20 nhịp).
Có thể bạn quan tâm!
-
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 2
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 2 -
 _ Khái Niệm Về Điều Khiển Theo Chương Trình Số
_ Khái Niệm Về Điều Khiển Theo Chương Trình Số -
 _ Phương Pháp Điều Khiển Bước Đủ Và Nửa Bước
_ Phương Pháp Điều Khiển Bước Đủ Và Nửa Bước -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 6
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 6 -
 Điều khiển máy khoan mạch in CNC dùng động cơ bước - 7
Điều khiển máy khoan mạch in CNC dùng động cơ bước - 7 -
 _ Thông Báo Lỗi Của Chương Trình Soạn Thảo
_ Thông Báo Lỗi Của Chương Trình Soạn Thảo
Xem toàn bộ 97 trang tài liệu này.
Quá trình chuyển mạch các cuộn dây điều khiển theo một trình tự (A+, B+, A, B,) và quá trình chuyển mạch theo trình tự (A+,B+), (A+, B),(A,B+), (A,B) Trong hai trường hợp này, thì trong một chu trình chuyển mạch có 20 nhịp (bước), và ở mỗi nhịp có số cuộn dây điều khiển được cấp xung dòng điện cho nhau.
Dạng điều khiển này được gọi là điều khiển bước đủ hay còn gọi là điều khiển đối xứng.
2. Phương pháp điều khiển nửa bước:
Thể hiện trình tự điều khiển nửa bước, quá trình điều khiển nửa bước tương tự
như quá trình điều khiển bước đủ, nhưng trình tự chuyển mạch các
cuộn
dây điều
khiển có khác nhau: cụ thể là từ A+, (A+,B+), B+, (A,B+), A, (A,B), B, (A+,B), …
bước hỗn hợp 5 pha điều khiểtrnởlưthỡanyg đcựổci có ba tầng
EMBED PBrush µ §
C
Xét về yêu cầu đảm bảo độ chính xác trong điều khiển, thì phương
pháp điều khiển nửa bước dễ
dàng đáp
ứng hơn, nhưng bộ
chuyển phát
xung điều khiển phức tạp hơn nhiều so với phương pháp điều khiển bước đủ.
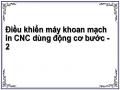
IV _ NGUYÊN LÝ HOẠT ĐỘNG CỦA ĐỘNG CƠ BƯỚC
1. Động cơ nam châm vĩnh cửu:
Nguyên lý làm việc của động cơ này là dựa vào tác động của một trường điện từ trên một mômen điện từ, từc là tác động giữa một trường điện từ và một hoặc nhiều nam châm vĩnh cửu. Roto của động cơ tạo thành một hoặc nhiều cặp từ và mômen điện từ của nam châm được dặt thẳng hàng trên từ trường quay do các cuộn dây tạo nên.
Xét cấu trúc của động cơ bước nam châm vĩnh cửu như:
ùc độn
b i
ö aø
g h
ro
h
ặt be
ăn
n
Hình 28: Sơ đồ kết cấu của động cơ bước
Động cơ có hai cuộn dây lắp ở hai cực của Stato, và một nam châm vĩnh cửu ở Roto. Khi kích thích một cuộn dây của Stato (đồng thời ngắt điện cuộn kia) sẽ tạo nên hai cực Bắc (North) và Nam (South) của nam châm. Roto sẽ thẳng đứng với hướng từ trường
Nếu ta cho dòng điện vào cuộn dây W1 thì vị trí 1 và 3 của Stato tương ứng sẽ là cực Nam và cực Bắc.
Giả sử trục của nam châm vĩnh cửu của Roto đang lệch với trục 13 một góc dưới tác dụng của lực hút do các cực trái dấu của nam châm sẽ sinh ra một lực quay Roto về vị trí 1, vị trí này gọi là vị trí cân bằng. Sau đó cho dòng điện I2 vào cuộn dây W2 (lúc này dòng điện ở cuộn W1 bị ngắt), thanh nam châm sẽ quay nhanh đến vị trí 2 một góc 900 nếu việc cấp điện liên tục và tuần tự vào cuộn dây W1, W2, W1, W2, …. Và đảo chiều dòng điện sau mỗi bước, thanh nam châm sẽ quay thành những vòng tròn, từ một phần tư vòng tròn đến một phần tư vòng tròn khác.
Các cuộn dây của Stato gọi là các pha. Động cơ bước có thể có nhiều pha: 2, 3, 4, 5 pha, nó được cấp điện cuộn này sang cuộn khác với việc đảo chiều dòng điện sau mỗi bước quay. Chiều các động cơ phụ thuộc vào thứ tự cung cấp điện cho các cuộn dây và hướng của từ trường.
2. Động cơ bước từ trở thay đổi:
C
Nguyên lý làm việc của động cơ bước từ trở thay đổi dựa trên cơ sở định luật cảm ứng điện từ, tức là dựa trên sự tác động giữa một trường điện từ và một Roto có từ trở thay đổi theo góc quay.
Cấu trúc tiêu biểu của động cơ bước có từ trở thay đổi
Hì
b
-6
từø
b
ớ
ù
g
h
Hình 29: Động cơ bước ba pha từ trở thay đổi
Roto động cơ điện được chế tạo bằng vật liệu dẫn từ, trên bề mặt Roto thường có nhiều răng. Mỗi răng của Roto hoặc của Stato gọi là một cực. Trên hai cực đối diện được mắc nối tiếp hai cuộn dây (ví dụ như cuộn dây AA') tạo thành một phần của động cơ. Như vậy động cơ như hình vẽ có ba pha A, B, C, từ trở thay đổi theo góc quay của răng. Khi các răng của Roto đứng thẳng hàng với các cực của Stato, từ trở ở đó sẽ nhỏ nhất. Nếu ta cho dòng điện chạy vào cuộn dây BB' nó sẽ tạo nên từ trường kéo cực gần nó nhất của roto và làm Roto quay một góc 300 theo chiều ngược chiều kim đồng hồ. Nếu dòng điện được đưa vào cuộn dây CC', Roto lại tiếp tục quay một góc 300 nữa … Các cuộn dây AA', BB', CC' gọi là các pha.
Hướng quay của động cơ không phụ thuộc vào chiều của dòng điện mà phụ thuộc vào thứ tự cấp điện cho cuộn dây. Nhiệm vụ này do các mạch logic trong bộ chuyển phát thực hiện. Với cách thay đổi thứ tự hoặc thay đổi cách kích thích các cuộn dây ta cũng làm thay đổi các vị trí góc quay.
Động cơ bước có từ trở thay đổi có chuyển động êm, số bước lớn và tần số làm việc cũng khá lớn (từ 2 đến 5 Khz).
Một số công thức tính cho động cơ bước từ trở thay đổi: Nr : Số răng roto
Ns : Số răng stato
Np : Số pha
Pr : Góc độ răng roto
s : Góc bước
Rs : Giá trị bước
X = Ns/Np : số răng stato cho một pha
- Góc độ răng giữa hai răng kề nhau được xác định như sau :
Pr 3690 ;
Nr
Ps 3600
Pr
- Góc bước được xác định bởi biểu thức :
s 3600
Nr.Np
(độ / bước)
C
- Giá trị bước
Rs 360
s
- Nếu tần số xung là f thì tốc độ Roto là:
69 f Rs
60 f Np.Nr
s
6 (vòng / phút)
- Số răng Roto cho một pha:
X Nr
Np 1
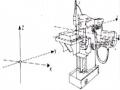
3. Động cơ hổn hợp:
Động cơ hổn hợp là sự kết hợp nguyên tắt làm việc của động cơ có bước nam châm vĩnh cửu và động cơ bước có từ trở thay đổi nhằm có được đặt tính tốt nhất của hai loại kể trên là momen lớn và số bước lớn.
1
2
Hình 210: sơ đồ động cơ bước hổn hợp
Động cơ gồm hai nửa Roto (1) và (2). Nửa(1) có nhiều răng trên Roto, nửa (2) là nam châm vĩnh cửu. Do đó có sự kết hợp giữa hai phần nên tạo ra sự kích thích roto mạnh hơn. Động cơ loại này có số bước đạt đến 400 bước, nhưng giá thành đắt.
4. Động cơ nhiều Stato:
Hình 211: sơ đồ động cơ nhiều stato
C
Động cơ gồm nhiều stato trên cùng một trục. Nếu ta dịch chuyển stato đi một
góc đồng thời giữ Roto thẳng hàng hoặc ngược lại có bước rất nhỏ. Khi cung cấp điện
cho stato một cách liên tục, ta sẽ có một động cơ (quay liên tục), đặc tính của nó không tốt bằng động cơ có từ trở thay đội.
V _ ĐẶC TÍNH CỦA ĐỘNG CƠ BƯỚC
1. Đặc tính tĩnh:
Góc bước : là trị số góc quay của một bước, là góc quay của trục động cơ dưới tác dụng của một xung điện chạy qua cuộn dây điện kế tiếp. Nó phù hợp với số bước/ vòng. Điều khiển động cơ hổn hợp bằng bộ chuyển phát cho phép nhân số bước thực tế để điều khiển nửa bước (khi hai pha được cấp điện cùng một lúc) và điều khiển vi bước (khi cho dòng điện có trị số khác nhau vào các pha). Số bước có thể là 2000 đến 25000 bước/vòng.
Moment : Moment thay đổi theo góc quay của trục được gọi là đặc tính của động cơ bước. Nó được biểu hiện như hình sau :
Hình 212 Momem của động cơ bước
g a
M
i
ớ
c
y
men
Mf
B Mk
M
Moment tĩnh (Mo): Khi động cơ được cấp điện, roto có xu hướng nằm trên trục của từ thông, hình thành một momen rất lớn để động cơ có thể quay. Giá trị này gọi là momen tĩnh.
Momen hãm là momen cản do trục của động cơ nam châm vĩnh cửu tạo nên khi các cuộn dây stato không được kích thích. Để động cơ có thể hoạt động chính xác thì momen luôn luôn nhỏ hơn momen tĩnh.
Momen duy trì là momen lớn nhất do cuộn dây kích thích tạo nên trên trục động cơ từ trở thay đổi không có momen này.
2. Đặc tính động của động cơ bước:
Vận tốc của động cơ bước phụ thuộc vào tần số xung điều khiển. Tần số này do bộ điện tử cung cấp
Đặc điểm vận tốc của roto trên một bước thể hiện tính dao động của trục động cơ. Đặc tính này có thể được cải thiện bằng việc thiết kế một hộp biến tốc đặc biệt nhằm hạn chế và loại trừ sự cộng hưởng để có được hằng số thời gian tốt hơn.
Khi có một xung dòng điện vào cuộn dây Stato, Roto động cơ không chuyển động
ngay từ góc này sang góc khác, mà nó dao động một thời gian cần để quay 5% vòng thì
mới đạt được vị trí ổn định. Hằng số thời gian phụ thuộc vào moment quán tính của từ
thông .
C
Tần số xung càng cao thì hằng số thời gian điện từ sẽ càng ngắn. Nếu xung điều khiển đông cơ có tần số quá cao thì roto sẽ quay liên tục và làm việc quá tần số giới hạn. Ở
chế độ này động cơ không thể dừng đột ngột và cũng không thể đảo chiều. Muốn
thựchiện dừng động cơ, cần phải giảm tần số đến vùng làm việc theo bước.
Hai đường đặt tính hình thành vùng giới hạn làm việc là đường cong Mc và Mk.
Mc là momen tới hạn, momen lớn nhất tác động lên trục làm động cơ quay ở tần số đã cho. Trên giới hạn này động cơ bị sai bước và không thể thay đổi tần số bước.
Mk làø momen khởi động lớn nhất, thường bằng 2/3 gía trị momen duy trì.
Trên đồ thị có hai vùng làm việc động cơ A và B
Vùng A : là vùng khởi động. Ở vùng này động cơ sẽ có thể khởi động, dừng và đảo chiều mà không bị sai bước.
Vùng B : là vùng bội tốc. Ở đây động cơ không thể đáp ứng tức thời các lệcnh khởi động, dừng và đảo chiều. Nó chỉ có thể quay nếu tần số tăng tuần tự đến một gía trị thích hợp. Ở vùng này không cho phép khởi động, dừng và đảo chiều nhưng có thể tăng, giảm tốc từ từ. Muốn dừng chính xác động cơ, vận tốc xung phải giảm tốc từ từ đến kmomen khởi động
Hình 213 đường đặc tính của động cơ bước
Tần số tới hạn fmax: là tần số bước lớn nhất khi động cơ chạy không tải.
Tần số tới hạn ft : là tần số bước lớn nhất mà động cơ có thể làm việc không sai bước khi quay không tải.
Tần số khởi động fk: là tần số bước lớn nhất mà động cơ có thể khởi động khi có tải.
Tần số fkmax: là tần số bước lớn nhất mà động cơ có thể khởi động lúc không tải
ĐIỀU KHIỂN ĐỘNG CƠ BƯỚC
Điều khiển động cơ bước do một thiết bị điện tử gọi là bộ chuyển phát thực hiện. Nó bao gồm một số chức năng sau đây:
Tạo các xung với những tần số khác nhau.
Chuyển đổi các phần cho phù hợp với thứ tự kích từ.
Làm giảm các dao động cơ học.
Sơ đồ mạch logic điện tử của bộ chuyển phát để điều khiển hình trong động cơ bước 4 pha được trình bày
C
T2
động cơc
B
2 Ph4
1 B a
Tc4hâ cơ
m na
T3
h
. 3 1
ửu
vó
Đầu vào của mạch này là các xung do máy phát xung tạo nên. Thành phần của mạch là các bán dẫn, vi mạch. Kích thích các phần của động cơ bước theo thứ tự 1234 do các transistor công suất T1 đến T4 thực hiện.VơÙi việc thay đổi vị trí bộ chuyển mạch, động cơ có thể quay theo chiều kim đồng hồ hoặc ngược lại. ATất cả mọi transistor đều do mạch logic "VÀ" điều khiển. Hai bộ ổn định hai chiều T1 và T2 tạo các tín hiệu đóng mở cho các công tắt điề khiển. Trạng thái của hai bộ ổn định hai chiều điều khiển 4 trasistor theo cách thức như sau:
Hình 214: Sơ đồ mạch logic bộ chuyển phát điều khiển động cơ bước
Trạng thái ổn định Trạngthái transisr
A = B = 1T1 làm việc
A = B = 1T2 làm việc
A = B = 1T3 làm việc
C
CHƯƠNG I
PHẦN KHAI BÁO CHƯƠNG TRÌNH
Phần khai báo chương trình cung cấp các thông tin điều chỉnh cần thiết cho quá trình thực hiện chương trình điều khiển. Trong một chương
trình có thể không có phần khai báo, tuy nhiên sau đó các thông tin điều
chỉnh này sẻ được cung cấp bằng các lệnh riêng trong chương trình.
Ví dụ:
Phần khai báo của chương trình có thể được viết như sau:
#AXIS XYZ;
#STEPS 400, 400, 400;
#REF_SPEED 2000, 2000, 2000;
#ELEV 4, 4, 2;
Ý nghĩa các dòng khai báo theo thứ tự từ trên xuống dưới, chương trình điều khiển ba trục X, Y và Z theo chế độ mạch hở, tốc độ chuẩn của mỗi trục là 2000HZ, khoảng dịch chuyển của trục x và y là 4mm và của trục z là 2mm. Phần khai báo có thể bao gồm nhiều dòng khai báo hơn trong ví dụ trên, mỗi khai báo được viết trên một dòng riêng biệt.
CÁC LỆNH TRONG PHẦN KHAI BÁO
1. Lệnh #AXIS
Ý nghĩa : Chọn trục điều khiển
Cú pháp : #AXIS
Ứng dụng : Trước khi thực hiện chương trình PAL_PC cần phải
xác định số lượng trục được điều khiển trong khi gia công.
Giải Thích
Số lượng trục hợp lệ được mô tả như sau:
#AXIS X (chỉ có trục X)
#AXIS XY (trục x và y)
#AXIS XZ (trục x và z)
#AXIS XYZ (trục x, y và z)
Kết thúc lệnh này bằng dấu chấm phẩy.
Lệnh này phải là lệnh đầu tiên trong chương trình vì số lượng trục cần điều khiển sẽ có tác dụng đến tất cả các lệnh khác, số lượng thông số trong các lệnh khác phụ thuộc và số lượng trục được chọn.
Trong trường hợp chương trình không có lệnh này thì số trục được chọn mặc định là x, y và z.