Hình 511: Sơ đồ khối của Chip AT89C51
Flash trên chip cho phép bộ
nhớ
chương trình được lập trình lại trên hệ
thống hoặc bằng bộ lập trình không mất nội dung qui ước. Bằng cách kết hợp một CPU 8 Bit với Flash trên một Chip đơn, ATMEL AT89C51 là một hệ vi tính 8bit đơn chip mạnh cho ta một giải pháp có hiệu quả về chi phí và rất linh hoạt đối với các ứng dụng điều khiển tự động. Các đặc điểm của AT89C51 được tóm tắt như sau:
4 KB ROM; 2 bộ định thời (timer)/đếm 16 Bit;
128 Byte RAM; 4 Port xuất /nhập (I/O port) 8 bit;
Mạch giao tiếp nối tiếp; Không gian nhớ ngoài 64K;
Không gian nhớ dữ liệu ngoài 64K; Bộ xử lý bit (thao tác trên các bit);
210 vị trí nhớ được định địa chỉ;
32 đường xuất nhập.
Nhân/chia trong 4 s;
Chú thích sơ đồ khối của Chip AT89C51:
Interrupt control: điều khiển ngắt; Other registers: các thanh ghi khác;
Timer 2, 1, 0: bộ định thời 2, 1, 0; CPU: đơn vị điều khiển trung tâm;
Oscillator: mạch dao động; truyền;
Bus control: điều khiển đường
89
I/O ports: các cổng xuất/nhập; Serial port: cổng nối tiếp;
Address/data : địa chỉ/dữ được;
liệu;
RAM/ROM: bộ nhớ xóa/không xóa
Từ hình 511 đến hình 516 mô tả sơ đồ mạch của bộ điều khiển điện tử trung tâm (ECC) sau khi thiết kế với các linh kiện phụ trợ kết nối bên ngoài.
1
V 1 ~
G N D -
B R I D G E ~
V I N
V O U T
3
C _ 1 0 U 2 C 7 _ 1 0 4 CP _1 1 0 4 P 1
+
S W D P S T
1 0 u F
1 0 4
1 0 4
L E D _ P O W E
L E D N G U O N
C _ 2 2 0 U 1
1 2 V A C
1 0 u F
K H O I
N G U O N
L M 7 8 1 2 / T O
L M 7 8 1 2 U 1
J A C 5 V C O N 1
1
V I N
V O U T
3
1 2 V D C
J A C 1 2 V C O N 1
C _ 2 2 0 U 2
1 0 u F
1
2
1 2 V A C
2
1
1 2 A C C O N 1
1 2 V A C
P W S W C O N 1
L M 7 8 0 5 U 1
G N D
L M 7 8 0 5 / T O
V C C
R 1R 1 5
2
G N D
2
1
2 2 0
2
Hình 512: Sơ đồ khối mạch nguồn cung cấp.
V C C
V C C
R _ A R R Y 1
1
S I P 9
2 I N P U T 1 3 9
3 I N P U T 2 3 8
4 I N P U T 3 3 7
R E S I S T O R
5 I N P U T 4 3 6
6 I N P U T 5 3 5
V D K 1
4 0
3 1
R _ A R R Y 2
1
P 2 . 0 / A 8
P 2 . 1 / A 9
P 2 . 2 / A 1 0
P 2 . 3 / A 1 1
P 2 . 4 / A 1 2
P 2 . 5 / A 1 3
P 2 . 6 / A 1 4
P 2 . 7 / A 1 5
V C C E A / V P P
R E S I S T O R S I P 9
2 1 O P U T 1 2
2 2 O P U T 2 3
2 3 O P U T 3 4
2 4 O P U T 4 5
P 0 . 0 / A D 0
P 0 . 1 / A D 1
P 0 . 2 / A D 2
P 0 . 3 / A D 3
P 0 . 4 / A D 4
P 0 . 5 / A D 5
P 0 . 6 / A D 6
P 0 . 7 / A D 7
2 5 Q T 1 6
V C C
7 3 4
8 3 3
9 3 2
C
1
2
3
4
5
6
7
8
1 1 . 0 9 5 2
3 3 p 1 9
C _ 3 3 P 1
Y 1
C _ 3 3 P 2 1 8
3 3 p
2 6 Q T 2 7
2 7 Q N G U O C 8
2 8 Q T H U A N 9
P 1 . 0
P 1 . 1
P 1 . 2
P 1 . 3
P 1 . 4
P 1 . 5
P 1 . 6
P 1 . 7
C
P 3 . 0 / R X D P 3 . 1 / T X D P 3 . 4 / T 0
P 3 . 5 / T 1 P 3 . 6 / W R P 3 . 7 / R D
5 1
1 0
A T 8 9 C
1 1
1 4
1 5
1 6
1 7
X T A L 1
P 3 . 2 / I N T 0
P 3 . 3 / I N T 1
1 2 S t o p
1 3 S t a r t
X T A L 2
G N D
R S T
2 0
9
90 R E S E T
K H O I X U L Y T R U N G T A M
Hình 513: Sơ đồ khối xử lý trung tâm.
R 1 6
1 0 k
Q 1
2
D I O D E 1
1 2 V D C
D I O D E 2
R 1 7
1 0 k
2
Q 2
1 A 5 Q T H U A N 1 A 6 Q N G U O C
O C T O _ D C O 1
1
1 6
1 1 6
2
1 5
2 1 5
3
1 4
3 1 4
4
1 3
D I P _ X R
4 1 3
2 A B 1
D C O T
2 A B 2
D C O N
1 2 V D C
2
2
R _ 1 0 K 1
1 1
2 A B 1 2 A
1 k
R _ 1 0 K 2
5
6
1 k
R _ 1 K 4
V C C
2
2
2
2
R _ 1 K 1 R _ 1 K 2 R _ 1 K 3
1 k
1
1 k
1
1 k
1
1 A 5 1 A 6 1 A 7
1
1 A
1 k
D C O N1
I R F 5 4 0 N / T O
N 4 0 0 7
N 4 0 0 7
7
3
J 1
1D C O T I R F 5 4 0 N / T O
1 A 7 5
Q T 1 6
1 2
1 2
B 2 8
1 1
1 0
1 1
3
1 2
2
M O T O R
1 A 8 7
1 0
8
9
Q 3
D C1 O T
D I O D E 3 N 4 0 0 7
D I O D E 4 N 4 0 0 7
Q 4
2
1D C O N
Q T 2
8 9
3
I R F 5 4 0 N / T O R 1 8
1 0 k
I R F 5 4 0 N / T O R 1 9
3
1 0 k
M O T O R C O N T R O L
0
Hình 514: Sơ đồ khối mạch điều khiển động cơ điện bộ điều tốc.
D C 1
D P 1
5 O P H O T O 1
1 2 0
2 1 9
I N P U T 1
4 O P H O T O 1
C T A C _ T D O _ M O T O R 1
D C 2 3
D P 2 4
D C 3 5
D P 3 6
D C 4 7
D P 4 8
D C 5 9
1 8 I N P U T 2
T L P 5 2 1 X 5 N
1 7
1 6 I N P U T 3
1 5
1 4 I N P U T 4
1 3
1 2 I N P U T 5
V C C
2
2
2
2
R 2 0
R 2 1
R 2 2
1
1 k
1
1 k
1
1 k
2 B 1
2 B 2
2 B 3
1
2 B
R 2 3
1 k 4
2 B 1 1 1
O P U T 1 2 2
2 B 2 3 3
O P U T 2 4 4
2 B 3 5 5
O P U T 3 6 6
2 B 4 7 7
1 6 1 6
1 5 1 5
1 4 1 4
D I P _ X R
1 3 1 3
1 2 1 2
1 1 1 1
1 0 1 0
2 O P U T 1
O R O L E 1 2 O P U T 2
O R O L E 2 2 O P U T 3
2 O P U T 4
1
2
D P 5 1 0
1 1
0
O U T P U T
O P U T 4
8 8 9 9
1 2 V D C
A C
C T S W _ I N P U T B 1 L E D B _ O F F 1
R 3 0
V C C
2 2 2 2
C T A C _ B 1
Hình 515: SL EơD B _đO Nồ1
D P 2
S W M A G - S P D T
Rk3 6hối mạch nhận tín hiệu vào.
2 2 0
V C C
2 2 0 1
R 3 1
1 k
R 3 2
1 k
1
R 3 3
1 k
1
R 3 4
1 k
1
91 C T A C
0
S W _ I N P U T A 1
L E D A _ O F F 1
L E D A _ O N 1
1
2
R 3 9
R 4 0
V C C
K H O I C A C H L Y Q U A N G
2 O P U T 1 2 O P U T 2 2 O P U T 3 2 O P U T 4
D P 1 2 2 0 V C C S W M A G - S P D T
0 2 2 0
Hình 516: Sơ đồ khối mạch điều khiển cơ cấu chấp hành.
Phụ lục 2.
92
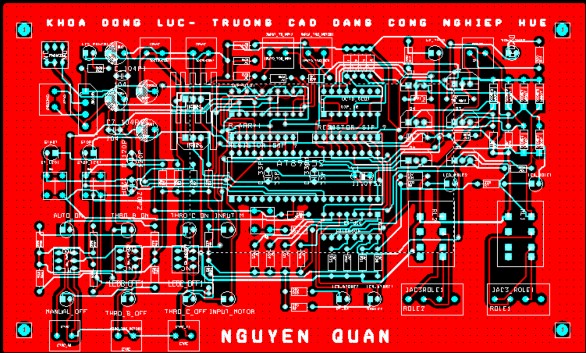
Sau khi thiết kế, tính toán bằng phần mềm chuyên dụng ta được bo mạch của bộ điều khiển điện tử trung tâm (ECC) như mô tả ở hình 516 và hình 517 mô tả bộ ECC hoàn chỉnh sau khi lắp ghép đầy đủ các linh kiện. Chương trình điều khiển hoạt động của bộ ECC được lập trình bằng ngôn ngữ máy tính C++ và nội dung của chương trình được trình bày ở trong phần
Hình 517: Cấu tạo bo mạch của bộ điều khiển điện tử trung tâm (ECC).

Hình 518: Cấu tạo của bộ điều khiển điện tử trung tâm (ECC).
3.16. Đo mô men và công suất của bánh xe chủ động:
Sau khi lắp đặt hoàn thiện xe gắn máy lai (hybrid) theo tính toán thiết kế, ta tiến hành khảo sát đường đặt tính kéo của xe bằng thiết bị đo công suất được mô tả như ở hình 61 và hình 62. Hình 63 và hình 64 mô tả vị trí kết nối giữa xe gắn máy và thiết bị đo công suất. Kết quả đo được mô tả ở bảng 61, các đường đặc tính mô men và công suất của bánh xe chủ
động được mô tả ở đồ
thị
hình 65 và đồ
thị
hình 66. Hình 67 mô tả
đường đặc tính mô men và công suất của động cơ nhiệt (LPG) khi bướm ga mở 100%.
Hình 61: Cấu tạo khung sườn bộ đo công suất xe gắn máy.
Hình 62: Các cơ cấu chính của bộ đo công suất xe gắn máy.

Hình 63: Kết nối xe gắn máy lai trên thiết bị đo công suất.
n (vòng/phút)
Động cơ điện 500W
Động cơ điện 1000W
Kết hợp 2 động cơ điện
Bảng 61: Tổng hợp kết quả đo mô men và công suất của động cơ điện.
M(N.m) | P(W) | M(N.m) | P(W) | M(N.m) | P(W) | ||
0 | 41,2 | 0,0 | 84,9 | 0,0 | 126,0 | 0,0 | |
50 | 39,9 | 208,8 | 79,8 | 417,8 | 119,7 | 626,6 | |
100 | 35,0 | 366,3 | 69,9 | 731,8 | 104,9 | 1098,1 | |
150 | 27,4 | 430,2 | 54,9 | 861,6 | 82,3 | 1291,8 | |
200 | 22,5 | 471,0 | 45,0 | 941,2 | 67,5 | 1412,2 | |
250 | 18,7 | 489,3 | 37,4 | 979,7 | 56,1 | 1469,0 | |
300 | 15,0 | 471,0 | 30,5 | 957,7 | 45,5 | 1428,7 | |
350 | 11,8 | 432,3 | 25,0 | 914,4 | 36,8 | 1346,7 |
Có thể bạn quan tâm!
-

 Thiết Kế Bộ Chế Hòa Khí Sử Dụng Lpg Cho Độmg Cơ Lutian Lt 154F:
Thiết Kế Bộ Chế Hòa Khí Sử Dụng Lpg Cho Độmg Cơ Lutian Lt 154F: -
 Cải Tạo Máy Phát Điện Phù Hợp Với Bộ Nguồn Ắc Quy:
Cải Tạo Máy Phát Điện Phù Hợp Với Bộ Nguồn Ắc Quy: -
 Thiết Kế Bộ Ly Hợp Ly Tâm Và Ly Hợp Điện Từ:
Thiết Kế Bộ Ly Hợp Ly Tâm Và Ly Hợp Điện Từ: -
 Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 13
Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 13 -
 Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 14
Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 14
Xem toàn bộ 118 trang tài liệu này.
8,7 | 364,2 | 20,0 | 837,3 | 28,7 | 1201,5 | |
450 | 6,0 | 282,6 | 15,0 | 708,4 | 21,0 | 991,0 |
500 | 3,2 | 167,5 | 9,9 | 519,1 | 13,1 | 686,6 |
550 | 0,0 | 0,0 | 5,0 | 285,5 | 5,0 | 285,5 |
600 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 |
Hình 65: Đường đặc tính mô men kéo của động cơ điện.