c) Đường kính D2 của bánh đai lớn xác định theo công thức: D2 = 0,98 . D1 . i = 0,98 . 100 . 3 = 294mm.
Chọn kích thước theo tiêu chuẩn là D2 = 280mm, sai lệch so với tính toán là 5% nhưng vì cơ cấu không ràng buộc về tỷ số truyền nên vẫn chấp nhận được.
d) Sơ bộ chọn (tra bảng theo i) khoảng cách trục A = D2 = 280mm.
e) Định chính xác chiều dài đai L và khoảng cách trục A:
Theo khoảng cách trục đã chọn sơ bộ tính ra chiều dài đai L theo công thức:
L = 2 . 280 + 3,14 . (280 + 100) / 2 + (280 – 100)2 / (4 . 280) = 1185,5mm.
Tra bảng chọn chiều dài dây đai theo tiêu chuẩn tương đương với giá trị tính toán là L = 1250mm. Sau khi có chiều dài đai thực tế, tính chính xác khoảng cách trục A theo chiều dài đai tiêu chuẩn đã chọn:
2.1250 3,14.(280 100) [2.1250 3,14.(280 100)]2 8.(280 100)2
A 8 353mm
Có thể bạn quan tâm!
-

 Quãng Đường Tăng Tốc Từ Ban Đầu Đến Vận Tốc Cực Đại:
Quãng Đường Tăng Tốc Từ Ban Đầu Đến Vận Tốc Cực Đại: -
 Thiết Kế Bộ Chế Hòa Khí Sử Dụng Lpg Cho Độmg Cơ Lutian Lt 154F:
Thiết Kế Bộ Chế Hòa Khí Sử Dụng Lpg Cho Độmg Cơ Lutian Lt 154F: -
 Cải Tạo Máy Phát Điện Phù Hợp Với Bộ Nguồn Ắc Quy:
Cải Tạo Máy Phát Điện Phù Hợp Với Bộ Nguồn Ắc Quy: -
 Đo Mô Men Và Công Suất Của Bánh Xe Chủ Động:
Đo Mô Men Và Công Suất Của Bánh Xe Chủ Động: -
 Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 13
Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 13 -
 Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 14
Tìm hiểu về công nghệ lai Hybrid trên ô tô và xe máy - 14
Xem toàn bộ 118 trang tài liệu này.
Độ hở giữa hai bánh đai là: l = A (D1 + D2) / 2 = 353 – 190 = 163mm.
Độ hở
này đủ
khoảng cách cần thiết để
lắp dây đai (độ
hở tối thiểu là:
19mm).
f) Kiểm nghiệm góc ôm, tính góc ôm dây đai theo công thức:
1 = 1800 – 570.( D2 D1) / A = 1800 – 570. 0,51 = 1510 min = 1200 .
Vậy, góc ôm trên bánh đai nhỏ của dây đai là đạt yêu cầu.
g) Xác định số dây đai cần thiết:
Số đai Z được xác định theo điều kiện tránh trượt trơn giữa dây đai và bánh đai, công thức tính như sau:
Z (1000 . P) / (v . [ P]0 . Ct . C . Cv . S)
Với P = 1(KW); v = 28,3(m/s); [ P]0 = 1,51(N/mm2); Ct = 0,9; C =0,92; Cv =
0,6; và S = 81(mm2), thay vào công thức trên ta được:
Z (1000 . 1) / (28,3 . 1,51 . 0,92 . 0,9 . 0,6 . 81) = 0,58.
Theo giá trị vừa tính được ta chọn Z = 1, vậy bộ truyền đai sử dụng 1 dây đai.
h) Định các kích thước chủ yếu của bánh đai:
Chiều rộng bánh đai: B = (Z – 1).t + 2.S = 16 + 1.10 = 26mm.
Đường kính ngoài: Dn1 =100 + 2.3,5= 107mm;
Dn2 =280 + 2.3,5= 287mm.
i) Tính lực căng ban đầu và lực tác dụng lên trục:
Lực căng ban đầu: F0 = 2 . 0 . S = 2 . 1,2 . 81 = 194,4(N).
Lực tác dụng lên trục: Fđ0 = 3.F0 .sin( 1/ 2) = 3.194.0,95 = 554(N).
3.13. Thiết kế bộ ly hợp ly tâm và ly hợp điện từ:
3.13.1. Bộ ly hợp ly tâm:
Bộ ly hợp ly tâm có chức năng đóng ngắt truyền động giữa động cơ nhiệt và máy phát điện. Khi động cơ nhiệt chạy ở tốc độ cầm chừng thì ly hợp ở trạng thái ngắt và khi tốc độ động cơ nhiệt lớn hơn 1500 vòng/phút
thì ly hợp ở trạng thái đóng. Để thuận tiện, ta sử dụng bộ ly hợp ly tâm
dùng trên xe mô tô Honda Super Dream 100 sau đó hiệu chỉnh một số chi
tiết cho phù hợp và kiểm tra lại các thông số kỹ thuật. Kết cấu và các
thông số cơ bản của bộ ly hợp ly tâm sử dụng trên xe Honda Super Dream
như ở
hình 53. Kiểm tra mô men truyền cực đại của bộ
ly hợp trên hệ
thống cần thiết kế, ta có:
Mx = m.r.D.z.f.π2/[1800.(n2 n02)]
Với m là khối lượng của quả văng, r là khoảng cách từ trọng tâm quả văng đến tâm quay, D là đường kính vòng tròn ma sát (đường kính trong vành chậu), f là hệ số ma sát và n0 là vòng quay của trục chủ động khi quả văng
bắt đầu áp sát vào vành chậu ly hợp. Thay các giá trị thức:
có được vào công
Mx = 0,1.0,05.0,12.3.0,3.3,142.(30002 15002) / 1800 = 20(Nm)
Như vậy mô men truyền qua bộ ly hợp ly tâm là đạt yêu cầu. Sau khi hiệu chỉnh và kết nối với bánh đai trên động cơ nhiệt ta được kết cấu chung của cơ cấu này như ở hình 54.
3.13.2. Bộ ly hợp điện từ:
Bộ ly hợp điện từ
được bố
trí trên trục của máy phát điện, có công
dụng đóng ngắt đường truyền công suất từ máy phát điện đến bánh xe sau, kết cấu của nó như ở hình 55. Mô men xoắn lớn nhất truyền qua ly hợp được xác định tại trường hợp hãm tái sinh với công suất 1500W và vòng
quay của máy phát điện là 1800 (vòng/phút) tương
ứng
ở tốc độ
xe đang
chạy 60Km/h. Ta tính mô men cực đại cần truyền qua bộ ly hợp điện từ theo công thức sau:
MP = P/ω = 1500/[(1800/60).2.3,14] = 8(N.m).
Vật liệu làm bề mặt ma sát được chọn là thép và phêrađô.
Từ kích thước đường kính ngoài của bánh đai lớn, chọn đường kính ngoài của đĩa thép là Dn = 185mm; đường kính trung bình Dtb = 0,8 . Dn = 148mm và đường kính trong Dtr = 0,75. Dtb = 138mm.
Hệ số ma sát f = 0,3; hệ số tải trọng K = 1,2; lực điện từ cần thiết của ly hợp được tính theo công thức:
Fđt = (2.K.MP) / (f.Dtb) = (2 . 1,2 . 8000) / (0,3 . 148) = 432(N).
Kiểm tra ứng suất trong vật liệu ma sát:
p = 4.Fđt / [ .(Dn2 Dtr2)] = 4 . 432 / [3,14 . (1852 – 1482)] = 0,045 N/mm2.
Giá trị ứng suất này nhỏ hơn ứng suất cho phép là [p] = 0,3 N/mm2 nên đảm
bảo đủ bền. Các kích thước khác được chọn theo kết cấu tiêu chuẩn,
đường kính trục và then hoa được xác định tại phần tính toán trục và gối đỡ ở mục tiếp theo.
Hình 55: Kết cấu bộ ly hợp điện từ
3.14. Thiết kế bố trí tổng thể hệ thống truyền động của xe:
Để phân bố tương đối đồng đều về tải trọng giữa bánh xe trước và bánh xe sau, chọn 2 động cơ điện có tổng công suất 1500W để lắp đặt lên
xe với động cơ ở
bánh xe trước là 500W và động cơ ở
bánh xe sau là
1000W. Tất cả các bộ phận của hệ thống truyền động được lắp trên một
bộ khung của xe mô tô điện hiệu ROBOTMN1000 do công ty lắp máy
Miền Nam sản xuất. Do tăng công suất, tăng tốc độ cực đại của xe và lắp đặt thêm thiết bị của hệ thống lai nên khung này được gia cường để đảm bảo độ bền tại vị trí lắp đặt bộ nguồn ắc quy và gắp sau của khung, nơi có lắp động cơ nhiệt và máy phát. Sơ đồ bố trí tổng thể các bộ phận của hệ thống truyền động được mô tả như ở hình 56. Động cơ nhiệt và máy phát điện được bố trí ở phía dưới yên xe và nằm trên gắp sau của xe. Bộ truyền
động đai sẽ kết nối phối hợp công suất giữa cụm động cơ nhiệt và máy
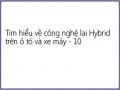
phát với động cơ điện lắp trên bánh sau nhằm mục đích hổ trợ lực kéo khi xe vượt dốc cao và thu hồi năng lượng khi cần giảm tốc độ xe (phanh tái sinh năng lượng). Nguồn điện (ắc quy) được bố trí ở khoảng trống để chân phía trước người lái và bình chứa nhiên liệu khí hóa lỏng LPG được lắp đặt ở phía đuôi xe, xem hình 57, 58 và 59.
Hình 56: Sơ đồ bố trí tổng thể hệ thống truyền động lai (hybrid)
Hình 57: Hệ thống truyền động lai (hybrid)
Hình 59: Xe gắn máy lai (hybrid) điện nhiệt (LPG).
87
Hình 58: Hệ thống truyền động cơ khí (truyền động đai)
Hình 510: Xe gắn máy lai (hybrid) hoàn chỉnh.
3.15. Chế tạo bộ điều khiển điện tử trung tâm (ECC):
Bộ điều khiển điện tử trung tâm (ECC) được thiết kế theo nguyên lý kỹ thuật số với nền tản của hệ thống là bộ vi điều khiển AT89C51 (Micro controller), là mạch tích hợp trên một chip có thể lập trình được, dùng để điều khiển hoạt động của một hệ thống. Theo các tập lệnh của người lập trình, bộ vi điều khiển tiến hành đọc, lưu trữ thông tin, xử lý thông tin, đo thời gian và tiến hành điều khiển các cơ cấu chấp hành. AT89C51 là một hệ vi tính 8 Bit đơn chip CMOS có hiệu suất cao, công suất nguồn tiêu thụ thấp và có 4 KB bộ nhớ Rom Flash xóa được hoặc lập trình được. Chip này
được sản xuấtIdNTự1a vào công nghệ bộ nhớ không mất nội dung có độ tích
INT0
hợp cao của AtTmimeerl.2 N(80ó32/c8ũ05n2g)
tương thích với tập lệnh và các chân ra của
T2EX
Timer 0
chuẩn công nghTiiệmper M1 CS51.
Timer2 T2
80328052
Other registers
Interrupt control
Serial port
ROM 0K:80318032
4K:8051
8K:8052
128 bytes RAM 80328052
128 bytes RAM
Timer 1 T1
Timer 0 T0
CPU
Oscillator
Bus control
Serial port
I/0 Ports
88
EA RST
ALE PSEN
![]()
P0 P1 P2 P3
TXD
RXD
Address / Data