B-B1
20
19
2
3
18 4
5
17 6
16 7
15 8
14
13
12
11
10
9
![]()
B
B
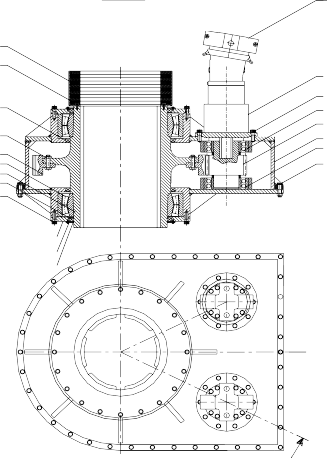
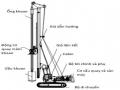
Hình 1.5. Sơ đồ truyền động cho mâm khoan của máy
1- Động cơ thuỷ lực dẫn động mâm khoan; 2 - Hộp giảm tốc hành tinh một cấp;
3 - Bu lông; 4 - Ổ bi cầu đỡ trên; 5 - Bánh răng chủ động; 6 - Vỏ; 7- Ổ bi cầu đỡ dưới; 8, 17, 19 - Bu lông; 9 - Mặt bích nhỏ; 10, 12 - Vít liên kết; 11 - Mặt bích lớn;
13,18 - Phớt; 14 - Trục truyền; 15 - Ổ bi đũa; 16 - Vành răng; 20 - Cơ cấu giảm chấn
Hiện nay, việc nội địa hóa MKCN tại Việt Nam có Công ty TNHH Cơ khí Việt Sinh là đơn vị tiên phong trong việc chế tạo đầu khoan của MKCN. Tại Việt Sinh, đầu khoan cọc nhồi là một trong những sản phẩm chủ lực, tạo được thương hiệu mạnh trên thị trường. Tất cả các đầu khoan cọc nhồi của Việt Sinh đều được chế tạo mới hoàn toàn 100% từ những chi tiết, linh kiện hiện đại của các hãng sản xuất danh tiếng trên thế giới theo công nghệ chuyển giao của hãng Nippon Sharyo (Nhật Bản). Ngoài cụm đầu khoan, Việt Sinh hiện đã nội địa hóa được một số bộ phận khác như thanh Kelly, giá đỡ mâm khoan, gầu khoan các loại và một số các phần tử thủy lực đơn giản.
1.2. Tổng quan các công trình đã nghiên cứu trong và ngoài nước liên quan đến luận án
1.2.1. Tổng quan các công trình nghiên cứu về động lực học của máy khoan cọc nhồi Trong [67], nhóm tác giả đã nghiên cứu phản ứng động theo chiều dọc của vành dẫn hướng MKCN trong đất nhiều lớp. Vành dẫn hướng được coi là một cọc ma sát hình vành khuyên và có thể được chia thành nhiều mảng tấm trong lớp đất. Mô hình tương tác của hệ thống bao gồm vành dẫn hướng - đất được xây dựng và thể hiện trên Hình 1.6, trong đó vùng màu đỏ chính là biểu diễn cho vành dẫn
hướng.
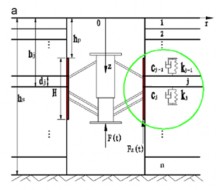
Hình 1.6. Mô hình động lực học của hệ vành dẫn hướng - đất
Phương trình động học của lớp đất thứ j dưới biến dạng theo chiều dọc như sau:
j j
2 w G
2 w 1 w
2 w 2 w
2 w
j
j
j
(j 2 G j ). 2 2
j G j
2 j
jj2
z r
r r
r t z
t
(1.1)
2 .
2 .
2 .
j
j j
1 w 2 w 2 w
j. j 2
Với:
t r r r t
E / (1 )(1 2 ), G .(V )2
Trong đó:
j j j j j j j j
j; Gj; wj=wj(r,,z,t); j; Ej; j;Vj và nj lần lượt là hằng số, độ dịch chuyển theo chiều thẳng đứng, mật độ, phương trình co giãn, tỷ số Poisson, vận tốc cắt và hệ số giảm độ nhớt của lớp đất thứ j.
Ngoài ra, nhóm tác giả còn xây dựng phương trình động lực học của vành dẫn hướng.
Gọi WjP= WjP(r,,z,t) là độ dịch chuyển theo chiều dọc của vành dẫn hướng thứ j ta có phương trình động lực học của vành dẫn hướng thứ j như sau:
j
j
j
Ep Ap
2 wp
p Ap
3wp
mp
2 wp
rp
(rp , , z, t) 0
(1.2)
j j z2
j j z2t
j t2
j j,o rzj j,o
Nhận xét: Sau khi phân tích, nhóm tác giả trong [67] sử dụng phép biến đổi Laplace và tách biến để giải các phương trình trên. Để kiểm định tính hợp lý của các giả định đối với vành dẫn hướng và tương tác lớp đất, nhóm tác giả đã thí nghiệm động trên một tấm toàn diện tại hiện trường. Vậy công trình nghiên cứu trên tuy có đề cập đến ĐLH của vành dẫn hướng nhưng ĐLH hệ thống truyền động thủy lực của cơ cấu thì chưa được xét tới.
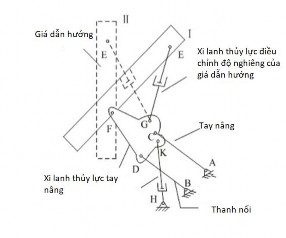
Theo [63], nhóm tác giả tập trung thể hiện các đặc tính về ĐLH của cơ cấu giá dẫn hướng của MKCN kiểu gầu xoay, đồng thời cũng đề cập đến việc cải hoán một vài bộ phận quan trọng của hệ thống thủy lực trong quá trình nâng. Đầu tiên, tác giả thiết lập mô hình ĐLH của cơ cấu giá dẫn hướng dựa trên phương pháp Newton- Euler, sau đó xây dựng một tập hợp các thông số vị trí cài đặt tối ưu thông qua việc phân tích và so sánh các đặc tính động trong quá trình nâng bằng cách thay đổi vị trí của cơ cấu nâng.
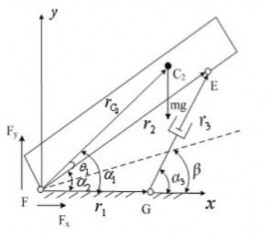
Cấu tạo giá dẫn hướng bộ công tác của MKCN kiểu gầu xoay bao gồm có cơ cấu hình tam giác nối khung, xi lanh thủy lực điều chỉnh độ nghiêng của giá dẫn hướng và giá dẫn hướng được thể hiện trong Hình 1.7 dưới đây. Trong quá trình nâng, tay nâng, thanh nối, giá đỡ cột dẫn hướng và các xi lanh thủy lực tay nâng không dịch chuyển; giá dẫn hướng quay quanh bản lề tại điểm F dưới tác động của xi lanh thủy lực điều chỉnh độ nghiêng của giá dẫn hướng.
Hình 1.8. Sơ đồ phân tích chuyển |
Có thể bạn quan tâm!
-

 Đối Tượng Nghiên Cứu Và Phạm Vi Nghiên Cứu
Đối Tượng Nghiên Cứu Và Phạm Vi Nghiên Cứu -
 Nghiên Cứu Động Lực Học Hệ Thống Truyền Động Thủy Lực Của Bộ Công Tác Máy Khoan Cọc Nhồi Kiểu Gầu Xoay Do Việt Nam Chế Tạo
Nghiên Cứu Động Lực Học Hệ Thống Truyền Động Thủy Lực Của Bộ Công Tác Máy Khoan Cọc Nhồi Kiểu Gầu Xoay Do Việt Nam Chế Tạo -
 Giới Thiệu Về Đối Tượng Nghiên Cứu: Máy Khoan Cọc Nhồi Có Bộ Công Tác Kiểu Gầu Xoay Lắp Trên Cần Trục Bánh Xích Hitachi Cx500
Giới Thiệu Về Đối Tượng Nghiên Cứu: Máy Khoan Cọc Nhồi Có Bộ Công Tác Kiểu Gầu Xoay Lắp Trên Cần Trục Bánh Xích Hitachi Cx500 -
 Sơ Đồ Cấu Tạo Của Máy Khoan Cọc Nhồi Kiểu Gầu Xoay
Sơ Đồ Cấu Tạo Của Máy Khoan Cọc Nhồi Kiểu Gầu Xoay -
 Các Thông Số Cơ Bản Của Thanh Kelly Đã Tính Toán Thiết Kế
Các Thông Số Cơ Bản Của Thanh Kelly Đã Tính Toán Thiết Kế -
 Ứng Dụng Matlab – Simulink Giải Phương Trình Chuyển Động
Ứng Dụng Matlab – Simulink Giải Phương Trình Chuyển Động
Xem toàn bộ 160 trang tài liệu này.
động giá dẫn hướng bộ công tác của MKCN kiểu gầu xoay |
Phương trình vận tốc và gia tốc của xi lanh thủy lực điều chỉnh độ nghiêng của giá dẫn hướng có thể được mô tả như sau:
3
r* r1r22 sin 2
r3
r cos(
) r
2 2 r sin(
) 2r cos( )
(1.3)
2
3 3 2 2 2 3 3 3 2 3 3 3 2
r3 sin(3 2 )
Sơ đồ mạch thuỷ lực của xi lanh thuỷ lực điều chỉnh độ nghiêng giá dẫn hướng
được biểu thị trên hình sau đây:
Hình 1.10 Sơ đồ khối của chương trình Matlab Simulink |
Lực trên cán piston(N)
Lực ép của khớp bản lề tại
Với các thông số của một máy cụ thể ngoài thực tế, đã thu được kết quả sau đây:
Các vị trí lắp đặt r2 khác nhau của giá dẫn hướng Hình 1.12. Quá trình thay đổi lực ép của khớp bản lề tại điểm F |
Nhận xét: Mô hình mô phỏng cơ cấu giá dẫn hướng của MKCN kiểu gầu xoay được xây dựng bằng cách sử dụng phương pháp mô hình hóa tổng hợp, nhóm tác giả
trong [63] đã tiến hành thay đổi vị trí lắp đặt của xi lanh điều chỉnh góc nghiêng giá dẫn hướng, kết quả phân tích cho thấy vị trí lắp đặt hợp lý của xi lanh là một trong những yếu tố quan trọng khi thiết kế chế tạo thiết bị này. Phương pháp mô hình hóa tổng hợp ở trên là cơ sở áp dụng cho các bài toán thiết kế cơ cấu giá dẫn hướng của các loại MKCN tương tự khác. Vậy có thể thấy rằng, công trình trên chủ yếu chỉ dừng lại ở việc mô phỏng ĐLH cơ cấu giá dẫn hướng của MKCN mà chưa xét đến ĐLH hệ thống TĐTL của máy.
1.2.2. Tổng quan các công trình nghiên cứu về phân tích, tối ưu hoá kết cấu của máy khoan cọc nhồi
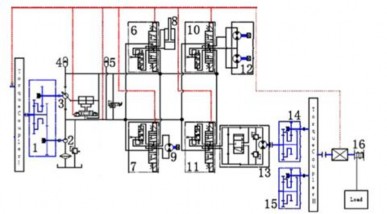
Theo [66], nhóm tác giả đưa ra mô hình và sơ đồ TĐTL của một loại MKCN kiểu gầu xoay (Rotary drilling rig- RDR) điển hình hiện nay như sau:
Bộ điều khiển
Độn cơ Truyền tín hiệu Bộ truyền cơ khí
Bộ truyền thủy lực
Tải
Hình 1.13. Sơ đồ mạch thuỷ lực của 1 loại máy khoan cọc nhồi kiểu gầu xoay (RDR) 1-Hệ thống truyền động; 2-Bơm thuỷ lực; 3- Bơm thay đổi lưu lượng; 4- van giảm áp; 5- Cơ cấu tăng áp lực khoan; 6- Hệ thống quay không tải; 7- Cơ cấu điều khiển mâm quay; 8-Van điều khiển của bộ tời; 9- Động cơ thủy lực với van cân bằng;
10- Hộp số; 11- Bộ tời.
Khi khoan tạo lỗ, các trạng thái làm việc quan trọng nhất của (RDR) thường là nâng, hạ, tăng áp lực khoan, khoan, nâng gầu lên và quay không tải. Hình 1.14 dưới đây chỉ ra các hoạt động điển hình trong một chu kỳ làm việc của máy. Khi đó một lượng lớn năng lượng tiềm năng của (RDR) đã được tiêu thụ dưới dạng nhiệt ở trạng thái khi thả gầu khoan đi xuống.
X: Thời gian [s]
Y: Công suất
Hình 1.14. Sơ đồ trạng thái điển hình của máy khoan cọc nhồi
0-Trạng thái chờ; 1- Trạng thái hạ gầu đi xuống, 2- Trạng thái tăng áp lực khoan và khoan; 3- Trạng thái nâng gầu lên; 4- Trạng thái quay không tải;
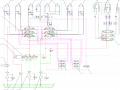
Theo nhóm tác giả [66], hệ thống khoan kiểu gầu xoay (RDR) bao gồm động cơ, cơ cấu tăng áp lực khoan, cơ cấu quay, thanh Kelly và hệ thống tời. Trong một chu kì làm việc, thế năng của tải trọng sẽ bị mất dưới dạng nhiệt thông qua van cân bằng khi các mũi khoan và cần khoan được thả xuống các lỗ dưới lòng đất từ vị trí không tải. Ngoài ra, động cơ luôn phải hoạt động để đáp ứng các yêu cầu về công suất trong các điều kiện làm việc khác nhau. Sự phức tạp của điều kiện làm việc khiến động cơ không thể làm việc được tốt nhất, điều này dẫn tới sự tiêu hao nhiên liệu của động cơ với sự thay đổi điều kiện làm việc theo đường cong tiêu hao nhiên liệu của động cơ. Chính vì vậy, nhóm tác giả [66] đã đưa ra sơ đồ hệ TĐTL hệ thống khoan kiểu gầu lai Hybrid (HDR) dưới đây:
Hình 1.15. Hệ TĐTL của hệ thống khoan kiểu gầu lai (hybrid) HDR
1-Hệ thống truyền động; 2-Bơm thuỷ lực; 3- Bơm thay đổi lưu lượng; 4- Bình ắc quy cao áp; 5- Bình chứa thuỷ lực áp lực thấp; 6- Thiết bị điều khiển I; 7- Thiết bị điều khiển II; 8- Bộ truyền động thuỷ lực của cơ cấu tăng áp; 9- Động cơ thuỷ lực của cơ cấu quay; 10- Thiết bị điểu khiển III; 11- Thiết bị điều khiển IV; 12- Động cơ thuỷ lực của mâm quay; 14- Động cơ thuỷ lực của bộ tời; 14- Hệ thống truyền động II; 15- Hệ thống truyền động III; 16- Bộ tời
Trong trạng thái chờ và trạng thái hạ tải của hệ thống HDR, động cơ luôn làm việc ở vùng cao của biểu đồ, do đó một lượng lớn năng lượng cơ học không cần thiết cho động cơ có thể được chuyển thành năng lượng điện thông qua mô tơ điện/máy phát I và được lưu trữ trong siêu tụ điện. Sự khác biệt chính so với thiết bị điều khiển bằng thủy lực truyền thống thông thường là nguồn năng lượng của HDR chủ yếu được cung cấp với hai loại luồng năng lượng là năng lượng cơ học được sản xuất bởi động cơ và năng lượng điện được tạo ra bởi các siêu tụ điện.
Nhận xét: Các tác giả [66] đã phân tích so sánh hiệu quả kinh tế về mặt chi phí nhiên liệu giữa hệ thống khoan kiểu gầu xoay (RDR) và hệ thống khoan kiểu gầu lai (hybrid)-HDR theo phương pháp ngưỡng-logic trong cùng một điều kiện hoạt động chung. Kết quả cho thấy hiệu quả tiết kiệm năng lượng của hệ thống khoan kiểu gầu lai (hybrid) là 18,8% và hiệu suất sử dụng nhiên liệu của hệ thống khoan kiểu gầu lai (hybrid) đạt 15,9% trong điều kiện hoạt động điển hình. Vậy có thể thấy rằng, nội dung đưa ra là tối ưu hóa về chi phí nhiên liệu của thiết bị, việc tối ưu hóa các thông số kết cấu và thông số làm việc của thiết bị chưa được đề cập đến.
Trong [62], nhóm tác giả đã đưa ra mô hình cơ học của cần khoan trên MKCN kiểu gầu xoay mã hiệu XR180L. Cần khoan trên MKCN XR180L là một trong những phần chính của thiết bị, có kết cấu thép dạng hộp, bản thân cần chịu tác dụng của các loại tải trọng trong quá trình làm việc. Độ cứng của kết cấu cần khoan có thể ảnh hưởng trực tiếp đến quá trình làm việc của máy khoan cọc nhồi. Vì vậy, việc nghiên cứu tối ưu hóa kết cấu thép của cần khoan trên MKCN kiểu gầu xoay là cấp thiết và có ý nghĩa trong việc thiết kế chế tạo và vận hành máy.
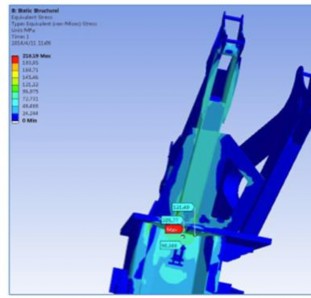
Theo nhóm tác giả, cần khoan làm việc ở các trạng thái khác nhau như trạng thái cần được nâng lên, trạng thái khoan nâng, trạng thái khoan, trạng thái nâng gầu đổ đất, trạng thái khi dịch chuyển. Những trạng thái như nâng cần, trạng thái nâng gầu khoan và trạng thái khoan là những trạng thái làm việc hết sức quan trọng của cần. Vì vậy, nhóm tác giả thực hiện việc phân tích tình hình phân bố ứng suất của giá dẫn hướng ở trạng thái nâng gầu khoan và trạng thái khoan. Nhóm tác giả [62] đã tiến hành mô phỏng kết cấu của cần khoan gồm 3 phần chính là phần đầu cột, đoạn giữa và đoạn cột dưới của máy khoan cọc nhồi kiểu gầu xoay bằng phần mềm tính toán phần tử hữu hạn ANSYS và đưa ra những kết quả dưới đây:
Hình 1.17.Chuyển vị của giá dẫn hướng tại trạng thái lực nâng lớn nhất |
Hình 1.19. Chuyển vị của giá dẫn hướng ở trạng thái mô men xoắn cực đại |
Nhận xét: Nhóm tác giả [62] đã chỉ ra được một vài vị trí nguy hiểm như là mặt phẳng tiếp xúc giữa đoạn đầu ngỗng và đoạn cột phía trên, hoặc mặt tiếp xúc giữa đoạn cột giữa và cột dưới. Các phần khác của cần khoan được coi là an toàn nơi mà sự tập trung ứng suất ít hơn. Những kết luận của công trình [62] là cơ sở lý thuyết quan trọng giúp cho việc thiết kế tối ưu hoá phần tử kết cấu sau này của thiết bị. Vậy có thể thấy rằng, trong [62] tác giả mới chỉ dừng lại ở việc tối ưu hóa kết cấu thép của cần dạng hộp, việc tối ưu các thông số của gầu khoan chưa được thực hiện.