in horizontal plan,” International Journal of Control, vol. 87, no. 5, pp. 1076–1093, 2014.
[122] C. Shen, B. Buckham, and Y. Shi, “Modified C/GMRES Algorithm for Fast Nonlinear Model Predictive Tracking Control of AUVs,” IEEE Transactions on Control Systems Technology, vol. 25, no. 5, pp. 1896– 1904, 2017.
[123] J. Gao, A. A. Proctor, Y. Shi, and C. Bradley, “Hierarchical Model Predictive Image-Based Visual Servoing of Underwater Vehicles with Adaptive Neural Network Dynamic Control,” IEEE Transactions on Cybernetics, vol. 46, no. 10, pp. 2323–2334, 2016.
[124] J. Sun and J. Chen, “Networked predictive control for systems with unknown or partially known delay,” IET Control Theory & Applications, vol. 8, no. 18, pp. 2282–2288, 2014.
[125] S. Li and G.P. Liu, “Networked predictive control for nonlinear systems with stochastic disturbances in the presence of data losses,” Neurocomputing, vol. 194, pp. 56–64, 2016.
[126] Y. Sheng, Y. Shen, and M. Zhu, “Delay-dependent global exponential stability for delayed recurrent neural networks,” IEEE Transactions on Neural Networks and Learning Systems, 2016.
[127] C. F. Caruntu and C. Lazar, “Network delay predictive compensation based on time-delay modelling as disturbance,” International Journal of Control, vol. 87, no. 10, pp. 2012–2026, 2014.
[128] Y. Ding, Z. Xu, J. Zhao, K. Wang, and Z. Shao, “Embedded MPC controller based on interior-point method with convergence depth control,” Asian Journal of Control, vol. 18, no. 6, pp. 2064–2077, 2016.
[129] J.Q. Huang and F. L. Lewis, “Neural-network predictive control for nonlinear dynamic systems with time-delay,” IEEE Transactions on Neural Networks and Learning Systems, vol. 14, no. 2, pp. 377–389, 2003.
Có thể bạn quan tâm!
-
 Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13
Khoảng Cách Dạt Của Auv Và Vận Tốc Dòng Chảy Trong Tn13 -
 Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu
Hướng Phát Triển Tiếp Theo Của Lĩnh Vực Nghiên Cứu -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 17 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 19
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 19 -
 Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 20
Nghiên cứu điều khiển thích nghi cho robot lặn tự hành - 20
Xem toàn bộ 169 trang tài liệu này.
PHỤ LỤC
CÁC FILE MATLAB ĐỂ THỰC HIỆN MÔ PHỎNG ĐIỀU KHIỂN AUV
PL1. File mô phỏng điều khiển hướng và độ sâu AUV
% Submarine control test
% Date: 2019/Apr/14th
% ANNAI control of heading and depth
% Author: PHAM VIET ANH – HCM Unv. Of Transport
%======================================================================
clear; % clear all variables
NN = 6000; % number of sample
h = 0.1; % sample time (sec) i = 0;
% -------------------------------------- z = 0;
delta = 0;
delta_s = 0;
max_delta = 20*(pi/180); max_delta_s = 20*(pi/180);
% Controller's parameters of the rudder
% rho = 1; lambda = 0.2; sigma1 = 0.2; sigma2 = 0.05;
rho = 0.5; lambda = 0.1; sigma1 = 0.2; sigma2 = 0;
% Controller's parameters of the P&S stern planes
rho_s = 0.2; lambda_s = 0.1; sigma1_s = 0.2; sigma2_s = 0;
% ui = [ delta_r delta_s delta_b delta_bp delta_bs n ]'
% initial states: x = [ u v w p q r x y z phi theta psi ]' x = [0.3 0 0 0 0 0 0 0 -10 0 0 0*pi/180]';
U = 0.3;
%*************** START SIMULATION ******************* disp('Running...')
% We start executing the controller with ralative small weights: W21 = rand(6,4)*0.0001; % Set random hidden layer weights
W32 = rand(1,6)*0.0001; % Set random output layer weights W21_s = rand(6,4)*0.0001; % Set random hidden layer weights W32_s = rand(1,6)*0.0001; % Set random output layer weights
% lr_rate(3) = 0.01; % Initial learning rate
% N(3) = 5; % Initial number of iterations
net_in = zeros(4,1); % Set initial inputs of neural network net_in_s = zeros(4,1);
while i < NN, i=i+1;
time = (i-1)*h; % simulation time in seconds clc;
fprintf('Running...n*Counter = %d (%d)n',round(i/10),round((NN- i)/10));
r = x(6);
w = x(3);
% Sensor noise for the heading sensor with a uniform distribution on
% [-0.1,+0.1] deg.
% s = 0.1*(pi/180)*(2*rand - 1);
s = 0; % This allow us to remove the noise psi = x(12) + s; % Heading of the ship with sensor noise Z = x(9);
% psi = x(6);
% control system
% Phuong an 1:
if i<2000, psi_ref(i) = 10*(pi/180); end if i>=2000, psi_ref(i) = 0*(pi/180); end if i>=4000, psi_ref(i) = 10*(pi/180); end
% Phuong an 2
% psi_ref(i) = 10*(pi/180); Z_ref(i) = -4;
err = psi-psi_ref(i); % Do lech huong di so voi huong dat net_in(1) = err;
err_s = Z-Z_ref(i); net_in_s(1) = err_s;
ii=round(i/10);
if round(i/10)==0,ii=2,end
% store data for presentation xout(i,:) = [time,x',U,delta,delta_s]; e_out(ii,:) = [err; err_s];
%----------------------------------------------------------------------
----
% Dau ra cua BDK duoc tinh toan 1 giay 1 lan (theo bien "ii") if ii>3
% Calculate rudder command:
delta = mlnnc(1,6,4,net_in,W21,W32); delta_s = mlnnc(1,6,4,net_in_s,W21_s,W32_s);
if abs(delta)>max_delta,delta=sign(delta)*max_delta;end if
abs(delta_s)>max_delta_s,delta_s=sign(delta_s)*max_delta_s;end
ui = [delta
delta_s 0
0
0
300 ];
[xdot,U] = npsauv(x,ui);
% numerical integration
x = euler2(xdot,x,h); % Euler integration
% z = z + h*err;
% z = z + h*err_s;
% Now update the weights of NN using adaptive interaction algorithm
% (intensive training):
[W21,W32] = annaiTrainIte(h,0.5,50,1,6,4,net_in,... err,delta,r,z,rho,lambda,sigma1,sigma2); % Add
integration action
[W21_s,W32_s] = annaiTrainIte(h,0.5,50,1,6,4,net_in_s,...
err_s,delta_s,w,z,rho_s,lambda_s,sigma1_s,sigma2_s); % Add integration action
net_in(2) = e_out(ii-1,1); net_in(3) = e_out(ii-2,1); net_in(4) = e_out(ii-3,1);
net_in_s(2) = e_out(ii-1,2); net_in_s(3) = e_out(ii-2,2); net_in_s(4) = e_out(ii-3,2);
end % end of "if ii>3"
%----------------------------------------------------------------------
end
% time-series
t = xout(:,1);
u = xout(:,2);
v = xout(:,3);
w = xout(:,4);
p = xout(:,5);
q = xout(:,6);
r = xout(:,7)*180/pi;
X = xout(:,8);
Y = xout(:,9);
Z = xout(:,10);
phi = xout(:,11); theta = xout(:,12);
psi = xout(:,13)*180/pi; U = xout(:,14);
delta = -xout(:,15)*180/pi; delta_s = xout(:,16)*180/pi; psi_ref = psi_ref*180/pi;
% PLOT THE RESULTS
figure(1) clf subplot(211)
plot(t,psi_ref,'LineWidth',2,'Color','r','LineStyle','--') hold on
plot(t,psi,'LineWidth',2,'Color','b','LineStyle','-')
title('NNC control - Yaw angle psi (deg)'),ylabel('[Deg]'),grid on legend('Set course','Heading','Location','Best')
subplot(212) hold on
plot(t,delta,'LineWidth',2,'Color','b','LineStyle','-') title('Rudder angle delta (deg)')
xlabel('Time (s)'),ylabel('[Deg]'),grid on
% legend('PID','NNC')
figure(2) clf
hold on subplot(211)
plot(t,Z_ref,'LineWidth',2,'Color','r','LineStyle','--') hold on
plot(t,Z,'LineWidth',2,'Color','b','LineStyle','-')
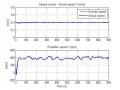
title('NNC control - Actual depth Z (m)'),ylabel('[m]'),grid on legend('Desired depth','Actual depth','Location','Best') subplot(212) plot(t,delta_s,'LineWidth',2,'Color','b','LineStyle','-') title('Plane angle delta_s (deg)')
xlabel('Time (s)'),ylabel('[Deg]'),grid on
figure(3) clf
plot3(X,Y,Z,'LineWidth',2,'Color','b','LineStyle','-') grid on
title('Simulation of the AUV track by NNC') xlabel('X(m)'),ylabel('Y(m)'),zlabel('Z(m)')
% >>>>>>END<<<<<<<<
PL2. File mô phỏng điều khiển hướng, độ sâu và tốc độ AUV
% Submarine control test
% Decoupled control of speed, depth and course
% Date: 2009/May/01st
% Author: PHAM VIET ANH – HCM Unv. Of Transport
%======================================================================
clear; % clear all variables
NN = 6000; % number of sample
h = 0.1; % sample time (sec) i = 0;
% -------------------------------------- z = 0;
z_s = 0;
z_n = 0;
delta = 0;
delta_s = 0;
n = 150;
u = 0.3;
max_delta = 20*(pi/180); max_delta_s = 20*(pi/180); max_n = 1500;
%----------------------------------------------------------------------
% Controller's parameters of the rudder
rho = 0.5; lambda = 0.1; sigma1 = 0.2; sigma2 = 0;
%----------------------------------------------------------------------
% Controller's parameters of the P&S stern planes
rho_s = 0.2; lambda_s = 0.1; sigma1_s = 0.2; sigma2_s = 0.01;
%----------------------------------------------------------------------
% Controller's parameters of the propeller
rho_n = 1.5; lambda_n = 0.1; sigma1_n = 0.2; sigma2_n = 0.05;
%----------------------------------------------------------------------
% ui = [ delta_r delta_s delta_b delta_bp delta_bs n ]'
% initial states: x = [ u v w p q r x y z phi theta psi ]' x = [0.3 0 0 0 0 0 0 0 -10 0 0 0*pi/180]';
U = 0.3;
%*************** START SIMULATION ******************* disp('Running...')
% We start executing the controller with ralative small weights: W21 = rand(6,4)*0.0001; % Set random hidden layer weights
W32 = rand(1,6)*0.0001; % Set random output layer weights W21_s = rand(6,4)*0.0001; % Set random hidden layer weights W32_s = rand(1,6)*0.0001; % Set random output layer weights W21_n = rand(6,4)*0.0001; % Set random hidden layer weights W32_n = rand(1,6)*0.0001; % Set random output layer weights
net_in = zeros(4,1); % Set initial inputs of neural network net_in_s = zeros(4,1);
net_in_n = zeros(4,1);
while i < NN, i=i+1;
time = (i-1)*h; % simulation time in seconds clc;
fprintf('Running...n*Counter = %d (%d)n',round(i/10),round((NN- i)/10));
r = x(6);
w = x(3);
udot = u-x(1);
u = x(1);
q = x(5);
theta= x(11);
% Sensor noise for the heading sensor with a uniform distribution on
% [-0.1,+0.1] deg.
% s = 0.1*(pi/180)*(2*rand - 1);
s = 0; % This allow us to remove the noise psi = x(12) + s; % Heading of the ship with sensor noise Z = x(9);
% psi = x(6);
% control system
% Phuong an 1:
if i<2000, psi_ref(i) = 10*(pi/180); end if i>=2000, psi_ref(i) = 0*(pi/180); end if i>=4000, psi_ref(i) = 15*(pi/180); end
% Phuong an 2
% psi_ref(i) = 10*(pi/180); Z_ref(i) = -2;
% if i<3000, ud(i) = 0.4; end
% if i>=3000, ud(i) = 0.5; end ud(i) = 0.4;
err = psi-psi_ref(i); % Do lech huong di so voi huong dat net_in(1) = err;
err_s = Z-Z_ref(i); net_in_s(1) = err_s;
err_n = -u+ud(i); net_in_n(1) = err_n;
ii=round(i/10);
if round(i/10)==0,ii=2,end
% store data for presentation
xout(i,:) = [time,x',U,delta,delta_s,n]; e_out(ii,:) = [err; err_s;err_n];
%---------------------------------------------------------------------
% Dau ra cua BDK duoc tinh toan 1 giay 1 lan (theo bien "ii") if ii>3
% Calculate rudder command:
delta = mlnnc(1,6,4,net_in,W21,W32); delta_s = mlnnc(1,6,4,net_in_s,W21_s,W32_s);
n = mlnnc(1,6,4,net_in_n,W21_n,W32_n)*1500;
if abs(delta)>max_delta,delta=sign(delta)*max_delta;end if
abs(delta_s)>max_delta_s,delta_s=sign(delta_s)*max_delta_s;end if abs(n)>max_n,n=sign(n)*max_n;end
ui = [delta
delta_s 0
0
0
n ];
[xdot,U] = npsauv(x,ui);
% numerical integration
x = euler2(xdot,x,h); % Euler integration z = z + h*err;
z_s = z_s + h*err_s; z_n = z_n + h*err_n;
% Now update the weights of NN using adaptive interaction algorithm
% (intensive training):
[W21,W32] = annaiTrainIte(h,0.5,50,1,6,4,net_in,... err,delta,r,z,rho,lambda,sigma1,sigma2);
% Add integration action
[W21_s,W32_s] = annaiTrainIte(h,0.5,50,1,6,4,net_in_s,...
err_s,delta_s,w,theta,rho_s,lambda_s,sigma1_s,sigma2_s); % Add integration action
[W21_n,W32_n] = annaiTrainIte(h,0.5,50,1,6,4,net_in_n,...
err_n,n/1500,udot,z_n,rho_n,lambda_n,sigma1_n,sigma2_n);% Add integration action
net_in(2) = e_out(ii-1,1); net_in(3) = e_out(ii-2,1); net_in(4) = e_out(ii-3,1);
net_in_s(2) = e_out(ii-1,2); net_in_s(3) = e_out(ii-2,2); net_in_s(4) = e_out(ii-3,2);
net_in_n(2) = e_out(ii-1,3); net_in_n(3) = e_out(ii-2,3); net_in_n(4) = e_out(ii-3,3);
end % end of "if ii>3"
%----------------------------------------------------------------------
----
end
% time-series
t = xout(:,1);
u = xout(:,2);
v = xout(:,3);
w = xout(:,4);
p = xout(:,5);
q = xout(:,6);
r = xout(:,7)*180/pi;
X = xout(:,8);
Y = xout(:,9);
Z = xout(:,10);
phi = xout(:,11);
theta = xout(:,12)*180/pi; psi = xout(:,13)*180/pi; U = xout(:,14);
delta = -xout(:,15)*180/pi; delta_s = xout(:,16)*180/pi; n = xout(:,17);
psi_ref = psi_ref*180/pi;