Cấu trúc của mạng cclink: Mạng cclink được cấu tạo bởi các thành phần cơ bản sau: Trạm chủ, trạm cục bộ, module I/O từ xa, module điều khiển thiết bị từ xa, đầu hiển thị thao tác, biến tần, module thiết bị thông minh, điện trở đầu cuối
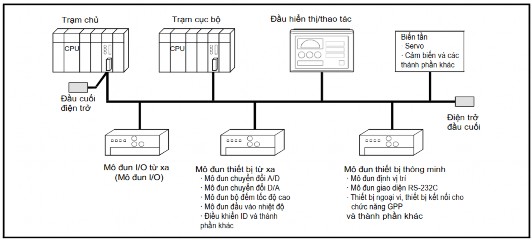
Hình 3. 23 Hệ thống cclink cơ bản
Có tổng cộng 4 loại trạm trong hệ thống CC-Link.
Trạm chủ
Trạm chủ là trạm mà Modulechủ và cục bộ được gắn kết trên đơn vị cơ sở và điều khiển toàn bộ hệ thống CC-Link. Các Modulekhác nhau theo từng dòng Q (QJ61BT11), dòng QnA (1QBT11, A1SJ61QBT11) và dòng A (AJ61BT11, A1SJ61BT11).
Trạm cục bộ
Trạm cục bộ là trạm mà Modulechủ và cục bộ được gắn kết với đơn vị cơ sở và giao tiếp với trạm chủ và các trạm cục bộ khác. Các Modulecó thể chỉa sẻ với Modulechủ. (Việc lựa chọn trạm chủ và cục bộ phụ thuộc vào cài đặt tham số mạng).
Có thể bạn quan tâm!
-

 Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700
Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700 -
 Seqence Dạng Block Của Cognex Designer
Seqence Dạng Block Của Cognex Designer -
 Áp Dụng Thực Tế Cho Thiết Bị
Áp Dụng Thực Tế Cho Thiết Bị -
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Xem toàn bộ 89 trang tài liệu này.
Trạm từ xa
Trạm từ xa tương ứng với một module I/O hoặc một module chức năng đặc biệt và thường thực thi đầu vào và đầu ra.
56
Bên cạnh đó, các thiết bị khác (biến tần, bộ hiển thị, cảm biến, vv...) Hơn nữa, trạm này cũng được chia thành một trạm I/O từ xa (tương ứng với một module I/O) và một trạm thiết bị từ xa (tương ứng với một modele chức năng đặc biệt;
biến tần, bộ hiển thị, cảm biến, vv...) Trạm thiết bị thông minh
Trạm thiết bị thông minh là trạm (module giao diện RS-232C, module định vị trí, bộ hiển thị, vv...) có thể thực thi truyền thông dữ liệu sử dụng truyền tức thời
3.5.2.2 Nguyên lý truyền thông mạng cclink
Truyền thông trạm chủ và module I/O từ xa: Quá trình truyền thông thực thi chỉ với tín hiệu on/off
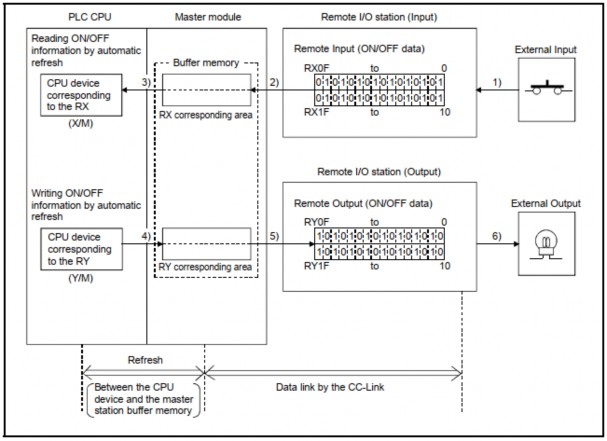
Hình 3. 24 Truyền thông trạm chủ và trạm từ xa I/O
1) Một tín hiệu là đầu vào từ một thiết bị bên ngoài đến trạm I/O từ xa.
57
2) Tín hiệu đầu vào từ xa (On/Off) của trạm I/O từ xa được lưu trong bộ nhớ đệm (khu vực tín hiệu đầu vào từ xa) của Modulechủ thông qua liên kết dữ liệu.
3) Thông tin tín hiệu đầu vào từ xa của trạm I/O từ xa được đọc từ bộ nhớ đệm (vị trí tín hiệu đầu vào từ xa) của Module master đến CPU PLC bằng cách tự động làm mới.
4) Kết quả tính toán được viết lại vào bộ nhớ đệm (vị trí tín hiệu đầu ra từ xa) của Modulechủ bằng phương pháp tự động làm mới
5) Thông tin On/Off được lưu trong bộ nhớ đệm của Module master (vị trí tín hiệu đầu ra từ xa) được triển khai tới tín hiệu đầu ra từ xa của trạm I/O từ xa thông qua liên kết dữ liệu.
6) Tín hiệu được xuất ra thiết bị bên ngoài từ trạm I/O từ xa Trạm chủ và trạm thiết bị từ xa:
Quá trình truyền thông được thực thi chỉ với thông tin On/Off (đầu vào từ xa RX và đầu ra từ xa RY) và dữ liệu số (thanh ghi từ xa).
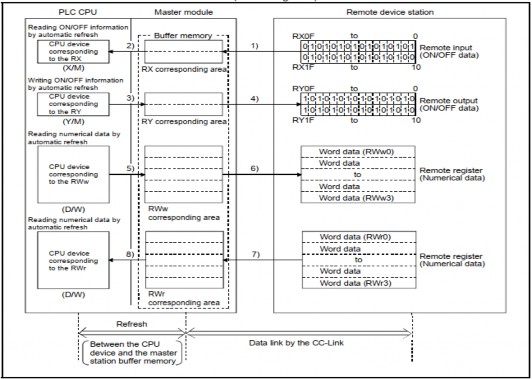
Hình 3. 25 Trạm chủ và trạm thiết bị từ xa
1) Tín hiệu đầu vào từ xa (On/Off) của trạm thiết bị từ xa được lưu trong bộ nhớ đệm (vị trí tín hiệu đầu vào từ xa) của module master bằng liên kết dữ liệu.
2) Thông tin tín hiệu đầu vào từ xa của trạm thiết bị từ xa được đọc từ bộ nhớ đệm (vị trí tín hiệu đầu vào từ xa) của module tới CPU PLC bằng tự động làm mới.
3) Kết quả tính toán được viết lại vào bộ nhớ đệm (vị trí tín hiệu đầu ra từ xa) của Module master bằng phương pháp tự động làm mới.
4) Thông tin On/Off được lưu trong bộ nhớ đệm của Module Master (vị trí tín hiệu đầu ra từ xa) được triển khai đến tín hiệu đầu ra từ xa của trạm thiết bị từ xa bằng liên kết dữ liệu.
5) Dữ liệu số được viết vào bộ nhớ đệm (vị trí đăng ký truyền từ xa) của Module master tự động làm mới.
6) Dữ liệu số được lưu trong bộ nhớ đệm (vị trí đăng ký truyền từ xa) của Module master được viết vào thanh ghi từ xa của trạm thiết bị từ xa bằng liên kết dữ liệu.
7) Thanh ghi từ xa (dữ liệu số) của trạm thiết bị từ xa được lưu trong bộ nhớ đệm (vị trí tiếp nhận thanh ghi từ xa) của Module master bằng liên kết dữ liệu.
8) Dữ liệu số của trạm thiết bị từ xa được đọc bởi bộ nhớ đệm (vị trí tiếp nhận thanh ghi từ xa) của Module master bằng tự động làm mới.
Trạm chủ và trạm cục bộ: Truyền thông giữa hai trạm có thể được thực hiện qua bit On/Off hoặc theo thanh ghi.
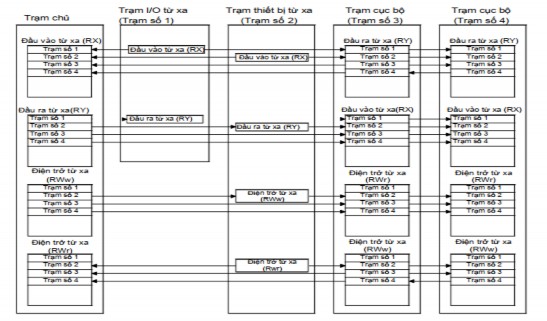
Hình 3. 26 Trạm chủ và trạm cục bộ
Áp dụng cho thiết bị thực tế:
Trong thiết bị thực tế được sử dụng 1 module master 4 module device station và 1 module intelligent và 6 module sation I/O
3.6 Kết quả của dự án và hướng phát triển
Trong kỷ nguyên công nghiệp hóa hiện đại hóa đất nước. Xu hướng thế giới và quốc gia đang nắm bắt cơ hội mà cuộc cách mang công nghiệp lần thứ 4 mang lại thì việc tìm hiểu và dần làm chủ các công nghệ sản xuất công nghiệp tiên tiến là vô cùng cần thiết. Luận văn mang lại sự tổng quan đến chi tiết về cấu tạo và tính năng của một trong những bộ phận rất cần thiết để phát triển công nghiệp tự động là Vision machine.
Luận văn còn cung cấp một hệ thống cụ thể và chi tiết về một thiết bị tự động công nghiệp giúp người đọc có thể nắm được các thành phần chi tiết của thiết bị như hệ thống Công nghệ Vision dùng camera cognex, phần mềm cognex designer, Robot ABB1200, PLC Mitsubishi Q06UVD và chi tiết cách cấu hình và cài đặt, cách điều khiển mang lại nguồn tài liệu cho những ai phát muốn phát triển hệ thống thiết bị tự động.
Với việc lựa chọn phần cứng hiện đại của những hãng có danh tiếng hàng đầu thế giới giúp tiếp cận được những công nghệ hiện đại tiên tiến hàng đầu, phương thức thiết lập, điều khiển thông minh của nhà sản xuất từ đó mở ra tầm nhìn bao quát cho việc sử dụng nguyên vật liệu cấu thành hệ thống thiết bị.
Ngoài ra với việc lựa chọn phần cứng hiện đại của những hãng có danh tiếng hàng đầu thế giới còn tạo ra được một sản phẩm có tính ổn định và độ tin cậy cao.
Hướng phát triển đề tài: Tiếp tục nghiên cứu về hệ thống Công nghệ Vision và kết hợp công nghệ AI để vừa thực hiện được công việc định vị sản phẩm vừa tích hợp được công việc kiểm tra chi tiết sản phẩm.
3.7 Kết luận về đề tài
Đề tài “nghiên cứu ứng dụng công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại”. Là đề tài thực tế và cấp thiết với những lợi ích mang lại :
- Nâng cao chất lượng sản phẩm.
- Giảm giá thành sản phẩm.
- Điều khiển quá trình. Nâng cao hiệu suất thiết bị.
- Giảm chi phí nhân công
Cần tiếp tục đầu tư nghiên cứu và phát triển.
TÀI LIÊU THAM KHẢO
Tiếng Anh
[1] Vision machine. Daekhon corporation Vission 2018.
[2] Cognex industrial cameras.Cognex.
[3] Cognex cc24 comuniction card. Cognex .
[4] Cognex CFG-8700 Series. Cognex .
[5] CFG – 8724 4-CH PCI Express GigE PoE Grabber. Mitsubishi. Cognex
[6] IRB 1200, M2004, Product specification.ABB Robotics.
[7] ABB Robotics Product Range Brochure 2019. ABB Robotics.
[8] IRB 1200, data sheet. ABB Robotics.
[9] IRC Industrial Robot Controller, data sheet. ABB Robotics.
[10] Melsec system Q programmable Logic controllers Use Manual.
Mitsubishi
[11]Mitsubishi Programmable Controllers Training Manual CC-link(for Gx Works2).Mitsubishi.
[12] MELSEC-Q QD77MS Simple Motion Module User's Manual (Positioning Control.mitsubishi
https://plcmitsubishi.com/tai-lieu-lap-trinh-plc-mitsubishi-tieng-viet.htmlhttps://www.cognex.com/products/machine-vision/vision-software/vision- accessories/io-cards
https://new.abb.com/products/robotics/industrial-robots/irb-1200
PHỤ LỤC:
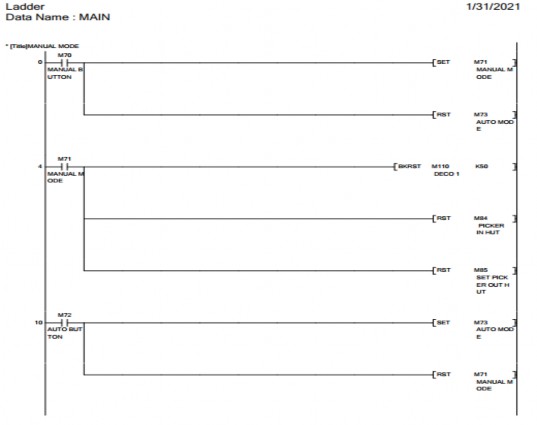
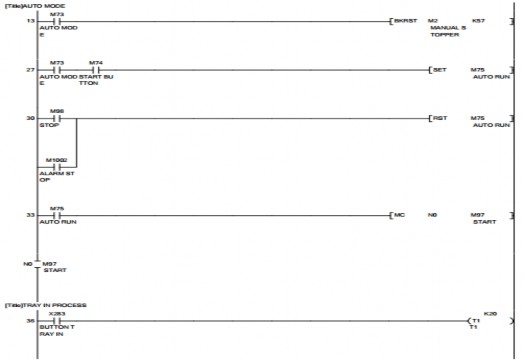
Chương trình main PLC