3.2.2 Chương trình
Gửi tín hiệu trigger
Sequence chương trình:
Robot
Vision
Trigger task sequence
Trigger camera
Run toolblok
Xử lý tọa độ nhận được
Tách chuỗi ra X,Y,Z, trạng thái
Send chuỗi X,Y,T, trạng thái
Di chuyển đến tọa độ nhận được
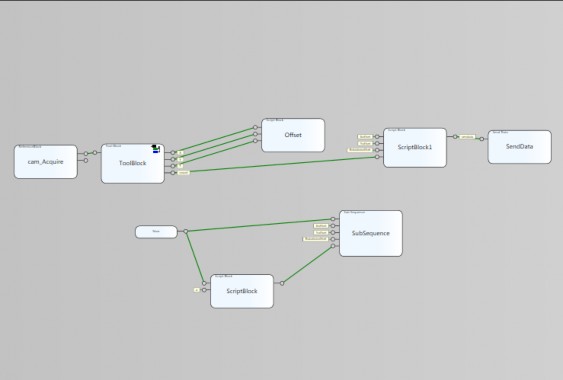
Hình 3. 6 seqence dạng block của Cognex Designer
Các khối :
Khối một: Cam_Acquire : Cho phép thiết lập ảnh đầu vào
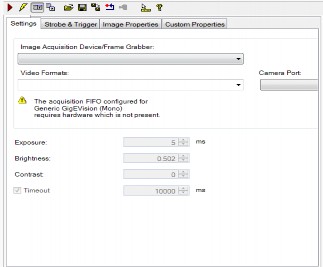
Hình 3. 7 Block Cam_Acquire
Khối hai Toolblock: Trung tâm xử lý hình ảnh của phần mềm, thư viện chứa đầy đủ các tool đáp ứng nhu cầu chủ yếu cho Machine Vision. Trong khuôn khổ luận văn sử dụng tool “ CogPMalignTool”. Cho phép xác định tọa độ X,Y,T của đối tượng cần định vị ngoài ra có thể . CogPMalignTool cho phép người dùng training khu vực nhận diện(scan area) và đặc điểm nhận diện(điểm mark) từ đó có thể nhận biết vật thể ở những vị trí khác nhau trong vùng nhìn thấy và đưa ra kết quả yêu cầu.
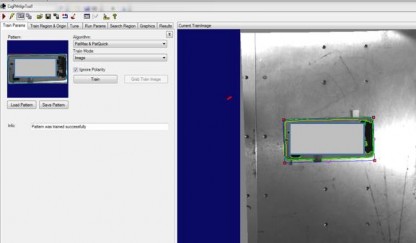
Hình 3. 8 Training điểm mark và scan area
Khối ba Offset: Do gốc hệ trục tọa độ của robot và vision là khác nhau mà chúng ta cần truyền chính xác tọa độ để robot di chuyển giải quyết bài toán như sau. Đầu tiên ta cho robot đi đến điểm gắp hàng chính xác nhất và cho sản phẩm cần gắp vào vị trí đó sau đó chụp ảnh lưu lại tọa độ chọn là tọa độ Master . Vị trí của các các sản phẩm tiếp theo chính bằng tọa độ của sản phẩm trừ đi tọa độ master
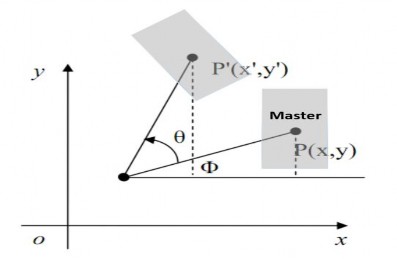
Hình 3. 9 Miêu tả nguyên lý offset
$Xoffset = ( $X- $Xmaster ) *100;
$Yoffset = ( $Y-$Ymaster) *100;
$Rotationoffset = -($T-$Rotationmaster )*100*180/Math.P
Khối bốn Khối Scriptblock1: Khối này thực hiện ghép chuỗi cho dữ liệu Xoffset, Yoffset, Rotationoffset và trạng do định dạng robot ABB nhận qua socket là dạng chuỗi. Nội dung của lệnh nhập chuỗi:
string a =
Xoffset.ToString("F2") +","+ Yofffset1.ToString("F2")+"," +Rotationoffset.
ToString("F2")+"," +trangthai.ToString(); return a;
Ba khối : Now, Scripblock, Subsequence nhiệm vụ tạo data base
3.3 Lập trình PLC Mitsubishi
Phần mền sử dụng GX Works2 cung cấp bởi Mitsubishi
Các bước thực hiện: bước 1 cài đặt parameter bước 2 cài đặt intelligent Funtion Module, bước 3 lập trình.
3.3.1 Cài đặt parameter
Có 2 nhóm parameter chính cần phải cài đặt là PLC parameter, Network parameter .
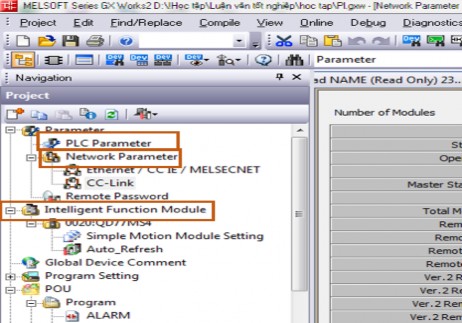
Hình 3. 10 các thiết lập cần thiết
PLC parameter
Các thông số các đặt cần thiết:
Built Ethernet port setting : Tại cửa sổ cài đặt cần thiết lập các thông số như đặt IP Adress cho thiết PLC, Communication data code ngoài ra thì có thể cài đặt mở rộng thêm FTP setting, Time setting ..
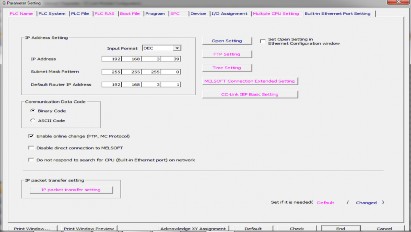
Hình 3. 11 Cửa sổ thiết lập Built in Ethernet port setting
Trong mục I/O Assigment : Khai báo các thiết bị sử dụng I/O gắn trên base. Trong luận văn có sử dụng thiết bị QD77MS4 cho việc điều khiển động cơ.
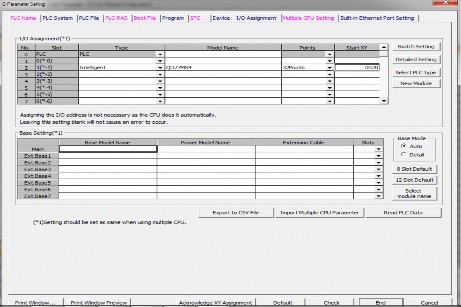
Hình 3. 12 Cửa sổ thiết lập I/O Assignment
Program: Khai báo những chương trình cho vào vòng quét để PLC thực hiện. Trong bài có 6 chương trình được khai báo là ALARM, ROB_VIS, INITIAL, SER_MOTO, NAME, MAIN
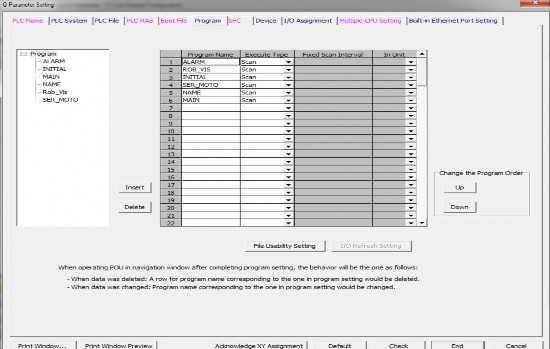
Hình 3. 13 Cửa sổ thiết lập Program
QJ61BT11N
CClink master
1 intelligent Station DSQ378B
1 intelligent Station DSQ378B
Giao tiếp robot
7 Remote I/O Station
I/O điều khiển ngoại vi
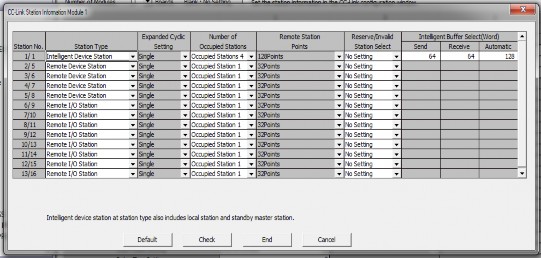
Network Parameter: Thiết lập các thông số cho các module truyền thông. Trong luận văn module truyền thông được sử dụng là CClink QJ61BT11N được cấu hình như sau:
4 Remote Driver Station Biến tần băng tải | |
Có thể bạn quan tâm!
-

 Thông Số Kỹ Thuật Bộ Điều Khiển Robot Irc5 Compact
Thông Số Kỹ Thuật Bộ Điều Khiển Robot Irc5 Compact -
 Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4
Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4 -
 Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700
Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700 -
 Áp Dụng Thực Tế Cho Thiết Bị
Áp Dụng Thực Tế Cho Thiết Bị -
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 9
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 9 -
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Xem toàn bộ 89 trang tài liệu này.
Các thông số cần lưu ý trong quá trình thiết lập:. Thứ nhất Start I/O No: Là địa chỉ đầu tiên mà module
Thứ hai Type : Là kiểu của module trong hệ thống nếu là hệ thống nhiều module thì sẽ có 1 Master và nhiều Slave.
Thứ ba Total Module connected: Là tổng số module và module cclink master kết nối đến.
Thứ tư Remote input(Rx) là địa chỉ X đầu tiên của cclink. Thứ năm Remote là địa chỉ(Ry) là địa chỉ Y đầu tiên.
Thứ sáu Remote Register(Rwr) : Địa chỉ thanh ghi đọc đầu tiên.
Thứ bảy Remote Register(Rww) : Địa chỉ thanh ghi vào đầu tiên.
Thứ tám Station information setting: chúng ta cần khai báo tất cả các trạng sử dụng trong mục này
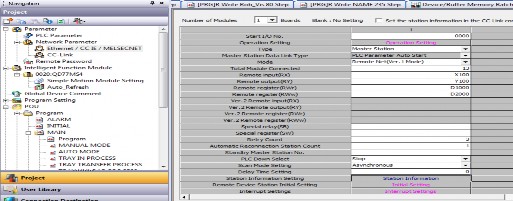
Hình 3. 14 Cửa sổ thiết cclink
Khai báo station information setting:
Hình 3. 15 Station information setting
3.3.2 Cài đặt Intelligent Funtion Module
Nhóm thiết lập các module intelligent của Mitsubishi như : Analog Module, temperature module, Counter module, Motion module… Trong luận văn chúng ta sử dụng Motion module QD77MS4.
46
Trong của sổ thiết lập cho phép chúng ta thiết lập các thông số cho động cơ thông qua module như: Vận tốc, tốc độ, momen, tốc độ home, phương thức về hôm, phương thức di chuyển ….
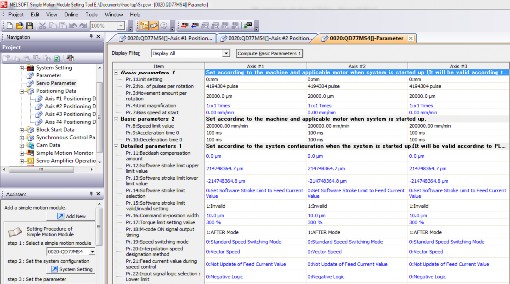
Hình 3. 16 thiết lập thông số cho module QD77MS4
3.3.3 Lập trình cho PLC
Cấu trúc chương trình: Chương trình được chia thành 6 chương trình chính: ALARM, INNITIAL, MAIN, NAME, Rob_vis, SER_MOTO
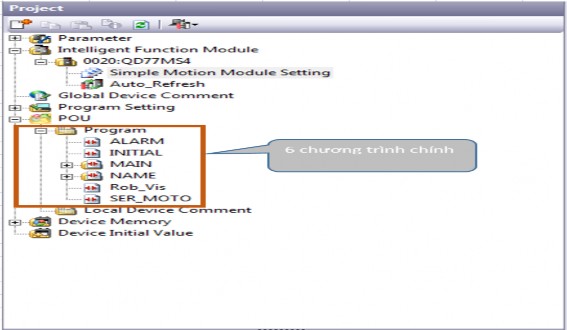
Hình 3. 17 Cấu trúc chương trình