47
Chương trình con ALARM : Chương trình thông báo cáo alarm thiết bị như: Ligt curtant, Vacuum, ..
Chương trình con INITIAl: Là chương trình đưa các trục, xylinder về vị trí home và gửi tín hiệu về home cho robot.
Chương trình Main: Là chương trình chính lớn chứa 5 chương trình con bao gồm: MANUAL MODE, AUTO MODE, TRAYIN PROCESS, TRANSFER PROCESS,TRAY OUT PROCESS
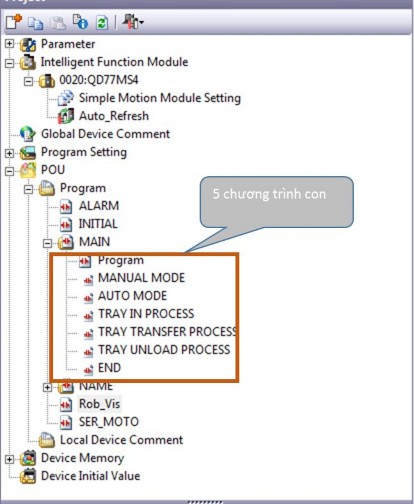
Hình 3. 18 Cấu trúc chương trình main
Chương trình MANUAL MODE : Chứa các lệnh cho phép điều khiển các lệnh ở trạng thái người người điều khiển các chu trình.
Chương trình AUTO MODE: Chứa các lệnh cho phép thiết lệp để thiết bị có thể vận hành các chu trình tự động.
Chương trình TRAY IN PROCESS: chứa các lệnh trong process nhập khay vào. Chương trình TRAY TRANSFER PROCESS: chứa các lệnh thực hiện process transfer khay từ buồng in sang vị trí nhận hàng robot thả.
Có thể bạn quan tâm!
-

 Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4
Thông Số Kỹ Thuật Module Điều Khiển Động Cơ Qd77Ms4 -
 Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700
Thông Số Kỹ Thuật Biến Tần Mitsubishi Fr- A7Nc E700 -
 Seqence Dạng Block Của Cognex Designer
Seqence Dạng Block Của Cognex Designer -
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 9
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 9 -
 Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Nghiên cứu công nghệ vision kết hợp với robot công nghiệp nhằm cải tiến độ chính xác trong quy trình sản xuất màn hình điện thoại - 10
Xem toàn bộ 89 trang tài liệu này.
Chương trìnhTRAY UNLOAD PROCESS: chứa các lệnh out khay và hàng ra ngoài. Chương trình NAME: chứa các lện điều khiển I/O thiết bị gồm các chương trình con : IN TRAY, OUT TRAY, SHUTTLE TRANSFER, TOOL ROBOT, PICKER IN, PICKER OUT.
Chương trình Rob_vis: Chứa các lệnh giao tiếp với robot.
Chương trình SERVO_MOTO: chứa các lệnh điều khiển chuyển động của các trục trong thiết bị.
3.4 Lập trình cho robot ABB
Các bước thực hiện: bước 1 khai báo teach các biến , bước 2 lập trình nhận dữ liệu và thuật toán di chuyển của robot.
3.4.1 Khai báo
Khai báo và teaching biến vị trí, tool, Wobj:
Thực hiện khai báo và teaching các biến vị trí: phome, pvsion wait, punloadup, punloaddown, plow11, phight11, pget, tool1,wobj1
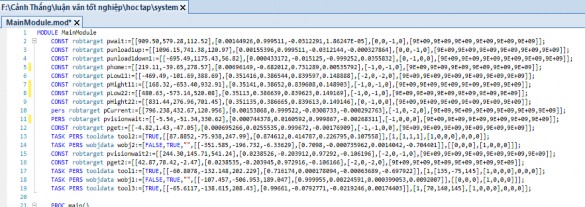
Hình 3. 19 Khai báo biến cho robot
3.4.2 Chương trình
Cấu trúc chương trình : gồm 2 phần chính là Main Module và System Module Chương trình Main module thực hiện các chức năng di chuyển, giao tiếp cho robot. Chương trình System module thực hiện chương trình liên quan đến vùng làm việc an toàn.
3.4.2.1 Main module:
Cấu tạo bởi 3 chương trình con: rhome, rget, rput.
Chương trình rhome: Chứa tập lệnh thực hiện đưa cánh tay robot về home một cách an toàn tránh gây va chạm với thành thiết bị.
Chương trình rget: Chứa tập giao tiếp xử lý thông tin tọa độ vision gửi để robot có thể thực hiện lấy hàng.
Chương trình rput: Chứa tập lệnh thực hiện việc thả hàng vào đúng vị trí của khay Trong khuôn khổ luận văn em xin làm rõ phần nội dung của rget chương trình thực hiện giao tiếp, xử lý thông tin tọa độ vision gửi và thực hiện gắp hàng.
![]()
![]()
Lưu đồ thuật toán:
Nhận tín hiệu run rget
Khởi tạo socket
Khởi tạo biến nhận
Gửi tiến hiệu chụp ảnh
Di chuyển tay robot về vị trí vision wait
Nhận dữ liệu
Tách giá trị X,Y,Rotation và trạng thái
Biến trạng thái
Yes
No
Thông báo về PLC vision NG, stop robot
Di chuyển robot về Pget offset (X,Y,Z=50)
![]()
![]()
![]()
![]()
![]()
`
Đọc vị trí hiệu tại gán vào Pcurent
![]()
Di chuyển robot về pcurent offset(rotation)
![]()
Đọc vị trí hiện tại gán vào Pcurent
Di chuyển robot về pcurent offset(z=-50)
On vacuum hút sản phẩm
Wait tín hiêu vacuum on ok
Kết thúc rget
Di chuyển về vision wait
Chương trình chi tiết PROC rget()
SocketClose socket; SocketCreate socket;
SocketConnect socket,"192.168.125.8",8090;
FOR i FROM 1 TO 4 do
str1{i}:=""; endfor
MoveL pvisionwait,v200,fine,tool1WObj:=wobj1; WaitTime 1;
SocketSend socketStr:="1";
SocketReceive socketStr:=rawbyte_data_rcv; index:=1;
FOR IN FROM 1 TO StrLen(rawbyte_data_rcv) DO IF StrPart(rawbyte_data_rcv,IN,1)<>"," THEN
str1{index}:=str1{index}+StrPart(rawbyte_data_rcv,IN,1); ELSE
index:=index+1; ENDIF
ENDFOR
ok:=StrToVal(str1{1},X1); ok:=StrToVal(str1{2},Y1); ok:=StrToVal(str1{3},ANG); ok:=StrToVal(str1{4},Vision_result);
IF Vision_result = 0 THEN TPWrite "Vision NG"; SetDO CO_05, 1;
Stop; ELSE
MoveL Offs(pget,(X1)/100,(Y1)/100,50),v300,fine,tool1WObj:=wobj1; pCurrent:=Crobt(Tool:=tool1WObj:=wobj1);
MoveL RelTool(pCurrent,0,0,0Rz:=(ANG)/100),v50T:=3,fine,tool1WObj:=wobj1;
pCurrent:=Crobt(Tool:=tool1WObj:=wobj1);
MoveL Offs(pCurrent,0,0,-50),v30,fine,tool1WObj:=wobj1; SetDO CO_02,1;
WaitDI CI_VAC_OK,1;
MoveL Offs(pvisionwait,0,0,-250),v100,z50,tool1WObj:=wobj1; PulseDOPLength:=1,CO_Getcomp;
WaitTime 0.5; ENDIF
ENDPROC
3.5 Phương thức truyền thông
Trong thiết bị dụng hai phương thức truyền thông truyền thông Ethernet và Cclink.
3.5.1 Truyền thông Ethernet/IP
EtherNet/IP (Ethernet Industrial Protocol ) là mạng Ethernet được sử dụng trong công nghiệp,được phát triển bởi Rockwell Automation. Thiết kế để sử dụng trong các ứng dụng tự động hóa công nghiệp.
Được chuẩn hóa và quản lý bởi hiệp hội OVDA quản lý các giao thức công
nghiệp thông thường

Hình 3. 20 Mô hình Ethernet/IP
EtherNet / IP là một giao thức lớp ứng dụng tương tự là một "giao thức Internet tiêu chuẩn để quản lý các thiết bị trên IP mạng “ hoạt động trên giao thức TCP/IP tương thích với mạng ControlNet và DeviceNet.
Xuất Xứ: Mạng Ethernet công nghiệp phát xuất từ mạng Ethernet, mạng được đề xuất bởi IEEE (Institute of Electrical and Electronic Engineers) năm 1985 gọi là chuẩn IEEE 802.3. Engineers) Mạng Ethernet là sản phẩm kết hợp của ba công ty Xerox, DEC và Intel năm 1976.
Ưu điểm của việc sử dụng Ethernet công nghiệp là tốc độ truyền tải cao, lắp đặt dễ dàng, nhiều thiết bị hỗ trợ.
Cơ chế đấu nối: Đối với thiết bị giống nhau thì dùng kiểu đấu chéo, đối với thiết bị giống nhau thì sử dụng đấu thẳng.
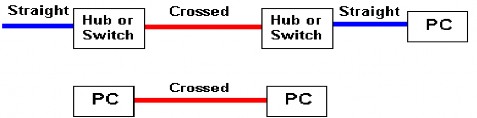
Hình 3. 21 Phương thức đấu nối
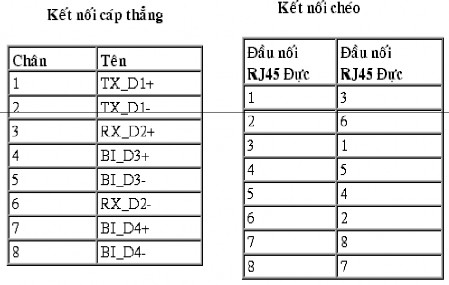
Bang 3. 1 sơ đồ đấu dây
Áp dụng Ethernet truyền cho thiết bị : Trong thiết bị mạng Ethernet được sử dụng để kết nối máy tính PC vision, Robot, PLC
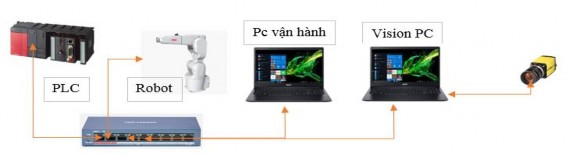
Hình 3. 22 áp dụng thực tế cho thiết bị
3.5.2 Truyền thông CClink
CClink là mạng truyền thông công nghiệp được phát triển bởi Mitsubishi. Bằng cách xây dựng trên công nghệ trường bus tin cậy, CClink có khả năng truyền tải khối lượng lớn dữ liệu bit, như trạng thái On/Off tốc độ cao. Module cclink đảm bảo cho quá trình tuyền tải dữ liệu thời gian thực. Một hệ thống cclink có thể được cấu hình bởi một trạm chính, tối đa 26 trạm phụ 64 trạm điều khiển vào ra, 42 trạm điều khiển thiết bị và 26 trạm điều khiển thông minh.
3.5.2.1 Cấu trúc mạng cclink