1 c ( y y* s )2 1 c ( y y* s )2
(3.70)
2 1 C 1 1 2 2 C 2 2
Thế các biểu thức động năng và thế năng vào phương trình Largrange loại II
d ( T ) T
(i = 1,2)
dt qiqi
qi
Ta nhận được phương trình vi phân dao động của ôtô
myc y c h(c
c cos t c
sin t)
C 11 C 12
2 11 13 14
J c y c h (c
c cos t c
sin t)
(3.71)
C 21 C 22
2 21 23 24
2
Trong các phương trình (3.71) ta ký hiệu c11 = c1 + c2 c21 = c12
c12 = c2s2 – c1s1 c22 = c1s12 + c2s2
c c
c cos 2l
c c s
c s cos 2ππ
(3.72)
13 1 2 L 23 1 1 2 2 L
c14
c2
sin 2l
L
c24
c2 s2
sin 2l
L
Để tìm các tần số riêng ta xét hệ phương trình vi phân tuyến tính thuần nhất tương ứng với (3.72)
m0 yCc11 c12 yC0
0 J
c
c
0
C
21
22
Phương trình tần số có dạng
C 2M
Từ đó suy ra
c11
2m c21
c22
c12 0
C
2 J
4 2 c
m c J
c c
c2
22 11 C
mJC
11 22 120
mJC
c m c J
c m c J 4mJ
2
c c c
2
22 11 C
22 11 C
C 11 22 12
Giải ra ta được
2
1,2
2mJC
(3.73)
Ta tìm nghiệm riêng của hệ phương trình (3.73) dưới dạng yC = A0 + A1cosst + A2sint
= B0 + B1cost + B2sint (3.74)
Thế các biểu thức (3.74) vào hệ phương trình vi phân (3.73) rồi so sánh cân bằng các hệ số ta nhận được các phương trình đại số tuyến tính để xác định các hằng số A0, A1, A2, B0, B1, B2.
c11A0 + c12B0 = hc11/2
c21A0 + c22B0 = hc21/2
(c11 - m2)A1 + c12B1 = -hc13/2
c21A1 + (c22 - JC2)B1 = -hc23 /2 (3.75) (c11 - m2)A2 + c12B2 = -hc14/2
c21A2 + (c22 - JC2)B2 = -hc24 /2
Giải ra ta được
A h ;
B 0
0 2
h c c
c c
J 2
0
h c c
c c
J 2
A1
23 12
13 22 C ;
B1
13 12
23 11 C
2
h c c
c c
J 2
2
h c c
c c
J 2
11
22
A2 2
24 12
14 22 C ;
B2 2
14 12
24 11 C
12
với
c
m2 c
JC
2 c2
Thế các hằng số A0, A1, A2, B0, B1, B2 tìm được vào biểu thức nghiệm (3.74) ta được các biểu thức xác định dao động cưỡng bức của ôtô
y h{11c c
c (c
J 2) cos t
C 2
23 12 13 22 C
(3.76)
1c c c (c J 2 ) sin t}
24 12 14 22 C
h c c
c (c
m2 )cos t c c
c (c
m2 )sin t
(3.77)
213 12
23 11
14 12
24 11
Hiện tượng cộng hưởng xảy ra khi = I (i = 1,2). Từ biểu thức (3.69) ta suy ra vận tốc giới hạn của ôtô
v* L ω
(i = 1,2) (3.78)
i 2π i
Để minh hoạ hằng số ta lấy L = 0,15m; h = 0,05m; s1 = 1,6m; s2 = 2m; c1 = 245,1662 N/cm; c2 = 294,1995 N/cm; m = 600kg; JC = 600 kgm2. Từ các số liệu trên ta có
l 24 c14 = c24 = 0; c13 = c1 + c2 = c11; c23 = c2s2 – c1s1 = c12
L
Từ các công thức (3.73) ta tính được
1 = 9,22s-1; 2 = 17,48s-1;
Vận tốc tới hạn của ôtô là
v* L ω 0,22 m / s 0,7 km/ h
1 2π1
2
v*
L
2π ω2
0,43m / s 1,5 km/ h
Biểu thức nghiệm (3.76) bây giờ có dạng
c
h c2 c c c J 2 h
yC
1
12 11 22
11 C
2
cos t
2
y0 cos t
2 c11
m2
c22
JC12 2
Đường cong cộng hưởng có dạng định tính như hình 3.14c.
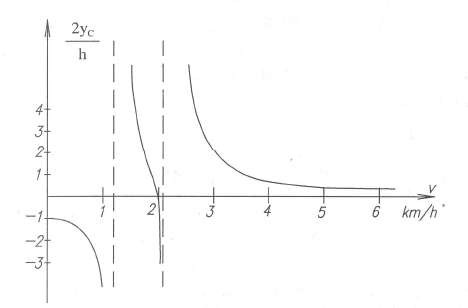
Hình 3.14c Đồ thị đường cong cộng hưởng
CÂU HỎI ÔN TẬP
x1
x2
c2 c2
m2
1. Cho mô hình dao động như hình vẽ, hãy thiết lập phương trình vi phân dao động của hệ.
x1
c1
x2
c2
c2
m1
m2
c1 | |
m1 | |
c1 |
Có thể bạn quan tâm!
-
 Phương Pháp Giải Trực Tiếp (Ma Trận Cản Tùy Ý)
Phương Pháp Giải Trực Tiếp (Ma Trận Cản Tùy Ý) -
 Phương Pháp Ma Trận Dạng Riêng (Ma Trận Cản Đặc Biệt)
Phương Pháp Ma Trận Dạng Riêng (Ma Trận Cản Đặc Biệt) -
 A Mô Hình Dao Động Bộ Tắt Chấn Động Lực Có Tính Đến Ma Sát Nhớt
A Mô Hình Dao Động Bộ Tắt Chấn Động Lực Có Tính Đến Ma Sát Nhớt -
 Các Điều Kiện Biên Của Một Vài Dạng Liên Kết
Các Điều Kiện Biên Của Một Vài Dạng Liên Kết -
 Thiết Lập Phương Trình Vi Phân Dao Động Uốn Của Dầm
Thiết Lập Phương Trình Vi Phân Dao Động Uốn Của Dầm -
 Dao Động Uốn Tự Do Của Dầm Euler- Bernoulli Đồng Chất Tiết Diện Không Đổi
Dao Động Uốn Tự Do Của Dầm Euler- Bernoulli Đồng Chất Tiết Diện Không Đổi
Xem toàn bộ 182 trang tài liệu này.
x1
c1
x2
c2
x3
c3
m1
m2
m3
c 1 | |
m1 |
c2 c2 | |
m2 |
x1
x2
c 1
Hình 3.15 Hình bài tập 1
2. Thiết lập phương trình vi phân dao động nhỏ của cơ hệ có hai thanh đồng chất, khối lượng m, chiều dài L nối với nhau bằng lò xo có độ cứng c. Ở vị trí cân bằng các thanh thẳng đứng, lò xo không biến dạng.
O1
O2
L
1
2
a
Hình 3.16 Hình bài tập 2
3.Cơ cấu truyền động của máy tiện được mô hình thành hệ ba đĩa có mô men quán tính đối với trục quay x là J1, J2 J3. Ngẫu lực ma sát nhớt ở các ổ đỡ tỉ lệ với vận tốc góc. Các đoạn trục có độ cứng xoắn là c1, c2 và khối lượng không đáng kể. Mô men xoắn của động cơ truyền qua dây đai là M(t). Thiết lập phương trình vi phân dao động của cơ hệ.
1 1 1
c1 | c2 | ||||||
M1 | M2 M(t) | ||||||
J1 J1 J1
Hình 3.17 Hình bài tập 3
4. Thiết lập phương trình vi phân dao động của dầm không trọng lượng mang ba khối lượng tập trung m1, m2, m3; mô đun đàn hồi của dầm là E, mômen quán tính của mặt cắt ngang là I.
F1
F2
F3
q1
q
2
q3
L/4 L/4 L/4 L/4
Hình 3.18 Hình bài tập 4
Chương 4
DAO ĐỘNG TUYẾN TÍNH CỦA HỆ VÔ HẠN BẬC TỰ DO
Các hệ liên tục còn được gọi là các hệ vô hạn bậc tự do. Trong chương này, ta xét dao động của một số hệ liên tục đơn giản nhưng hay gặp trong kỹ thuật. Đó là dao động của thanh và dầm. Các đại lượng vật lý đặc trưng cho dao động của hệ vô hạn bậc tự do như khối lượng, độ cứng phân bố một cách liên tục.
Phương trình mô tả dao động của hệ liên tục là các phương trình đạo hàm riêng.
Ở các hệ liên tục, ta nhận được vô số các tần số riêng, các dạng dao động riêng, vv…
4.1 DAO ĐỘNG DỌC VÀ DAO ĐỘNG XOẮN CỦA THANH THẲNG
4.1.1 Dao động dọc tự do của thanh đồng chất tiết diện không đổi
Xét một thanh thẳng (hình 4.1a) có mật độ khối là (x), thiết diện là A(x), môđun đàn hồi là E. Thanh thực hiện dao động (u,t) dọc trục (x). Áp dụng nguyên lý d’Alembert, xét một phân tố của thanh chịu lực như hình 4.1b. Phương trình chuyển động theo trục x của phân tố thanh có dạng
2u
N
xAxdx t2
N N dx
x
x A x 2
2u
t
N
x
(1.1)
Từ giáo trình sức bền vật liệu [37, 49] ta có
N EAxu
x
Thế biểu thức trên vào phương trình (1.1) ta nhận được phương trình dao động học tự do của thanh thẳng
2u u
xAxt2x EAxx 0
(1.2)
Khi (x) và A(x) đều là các hằng số, từ phương trình (1.2) ta suy ra phương trình dao động dọc tự do của thanh thẳng đồng chất thiết diện không đổi
2u
t2
2 2u
c x2
0;
c2 E
dx
(1.3)
x
E,A
a)
N
dmAdx
b)
N+ dx
x
Hình 4.1 Thanh thẳng đồng chất tiết diện không đổi
Như thế phương trình dao động dọc tự do của thanh thẳng là phương trình đạo hàm riêng cấp hai. Bây giờ ta tìm nghiệm của phương trình (1.3) dưới dạng
u(x, t) = X(x)T(t) (1.4)
Thế biểu thức nghiệm (1.4) vào phương trình (1.3) ta có X(x)𝑇(t) – c2X”(x)T(t) = 0
''
c2 X x
X x
T&&(x) T (x)
Do vế trái của phương trình trên chỉ phụ thuộc vào x, còn vế phải chỉ phụ thuộc vào t, cho nên hai vê đó phải bằng hằng số. Với mục đích trước, ta ký hiệu hằng số đó là -2. Ta có
2
X '' x
c X x
T&&(x) 2
T (x)
Từ đó ta nhận được hai phương trình vi phân thường
2
X '' x
c
X x 0
(1.5)
𝑇 𝑡 + 𝜔2 𝑇 𝑡 = 0 (1.6)
Nghiệm tổng quats của các phương trình này có dạng
X xA* cos x Bsin x
c c
(1.7)
T(t) = Ccos t + Dsin t (1.8)
x
l
Các hằng số A*, B được xác định từ các điều kiện biên, còn các hằng số C, D được xác định từ các điều kiện đầu.
x
l
E,A
E,A
E,A
x
l
a) b) c)
Hình 4.2 Liên kết thanh thẳng đồng chất tiết diện không đổi
Đối với thanh một đầu ngàm chặt, một đầu tự do (hình 4.2a), các điều kiện biên có dạng
u(0,t) = 0 X(0) = 0 A* = 0
N l,t EA u l,t 0 X l 0 B cos l 0
x c c
Với các giả thiết B ≠ 0, > 0, ta suy ra phương trình đặc trưng
cos
l 0
c
(1.9)
Từ đó suy ra các tần số riêng và các hàm riêng
E
l2
2k l c 2k l ;
k 1, 2,(1.10)
k 2 l 2
X xB
sin 2k l x;
k 1, 2,
k k 2 l
Đối với thanh hai đầu bị ngàm chặt (hình 4.2b), các điều kiện biên có dạng X(0)=0 A* = 0; X(l)=0
Từ đó suy ra các tần số riêng và các hàm riêng
k ck
k l
E;
l2
X k xBk
sin kx;
l
(1.11)
Đối với thanh hai đầu tự do (Hình 4.2c), các điều kiện biên có dạng
X’(0)=0 B = 0; X’(l) = 0
Từ đó ta nhận được
sin l 0
c
E
l2
k ck; X xA* cos kx
(1.12)
k l k k l
Như thế, từ các điều kiện biên, chúng ta xác định được các tần số riêng và hàm riêng. Bảng 4.1 thống kê một số dạng cơ bản các điều kiện bài toán dao động dọc thanh.
Thí dụ 4.2: Hãy xác định các tần số riêng và các hàm riêng của thanh một đầu bị ngàm chặt, một đầu mang khối lượng điểm m như hình 4.3a.
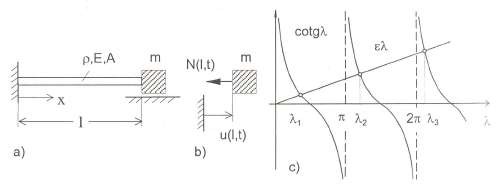
Hình 4.3 Hình thí dụ 4.2
Lời giải: Điều kiện bên trái
u(0, t) = 0 X(0) = 0 A* = 0
Điều kiện biên bên phải
EA u l,t
x
m
2u l,t
t2
EAX ' l m2 X l
EAB
cos l m2 Bsin l
c c c