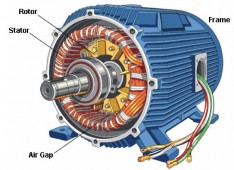
Hình 1.5: Khe hở
2.1.2. Nguyên lý làm việc của động cơ không đồng bộ xoay chiều ba pha;
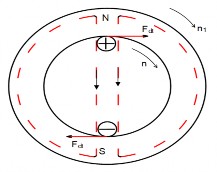
Hình 1.6: Sơ đồ nguyên lý làm việc của máy điện không đồng bộ
Khi ta cho dòng điện ba pha tần số f vào 3 dây quấn stato, sẽ tạo ra từ trường
quay p đôi cực, quay với tốc độ là n 60 f (vong / phut)
P
(1.1)
Có thể bạn quan tâm!
-

 Bảo dưỡng, sửa chữa động cơ không đồng bộ Nghề Cơ điện nông thôn - Trường CĐ Cộng đồng Lào Cai - 1
Bảo dưỡng, sửa chữa động cơ không đồng bộ Nghề Cơ điện nông thôn - Trường CĐ Cộng đồng Lào Cai - 1 -
 Phương Pháp Kiểm Tra Xác Định Cực Tính Động Cơ
Phương Pháp Kiểm Tra Xác Định Cực Tính Động Cơ -
 Các Thông Số Cơ Bản Của Sơ Đồ Dây Quấn Stato Động Cơ.
Các Thông Số Cơ Bản Của Sơ Đồ Dây Quấn Stato Động Cơ. -
 Sơ Đồ Trải Dây Quấn Động Cơ 3 Pha Kiểu Đồng Khuôn Hai Lớp Bước Ngắn
Sơ Đồ Trải Dây Quấn Động Cơ 3 Pha Kiểu Đồng Khuôn Hai Lớp Bước Ngắn
Xem toàn bộ 105 trang tài liệu này.
Từ trường quay cắt các thanh dẫn của dây quấn rôto, cảm ứng các sdd, vì dây quấn rôto nối ngắn mạch, nên các sdd sẽ sinh ra dòng điện trong các thanh dẫn rôto, lực tác dụng tương hỗ giữa rôto của máy vời từ trường thanh dẫn rôto, kéo rôto quay cùng chiều từ trường với tốc độ n.
Nếu rôto quay với tốc độ n, từ trường quay với tốc độ n1 thì tốc độ quay của rôto sẽ nhỏ hơn từ trường quay là n2. Vì nếu có tốc độ bằng nhau thì không có sự chuyển động tương đối, trong dây quấn rôto không có sdd và dòng điện cảm ứng, lực điện từ bằng không.
Độ trênh lệch tốc độ quay của rôto và từ trường quay gọi là n2
n2=n1-n (1.2)
Hệ số trượt:
s n2
n1
n1 n n1
(1.3)
Khi rôto đứng yên n=0,hệ số trượt s=1, khi rôto quay tốc độ động cơ là.
n n (1s) 60 f
(1s)(vong / phut)
(1.4)
1 P
2.2. Cấu tạo và nguyên lý làm việc của động cơ không đồng bộ một pha
2.2.1 Cấu tạo của động cơ không đồng bộ một pha
Động cơ KĐB một pha là thiết bị hoạt động dựa trên hiện tượng lực điện từ cho nên cấu tạo cơ bản của nó gồm có bộ phận điện là cuộn dây và bộ phận dẫn từ là lõi thép. Theo kết cấu, động cơ điện bao giờ cũng có hai phần chính là phần tĩnh (stato) và phần quay (rôto) được ngăn cách nhau bằng khe hở không khí.
Stato là một khối thép hình vành khăn được đặt vừa khít trong một vỏ kim loại. Vỏ này có hai nắp ở hai đầu, chính giữa hai nắp có hai ổ bạc hoặc hai ổ bi. Vỏ và nắp có nhiệm vụ định vị cho rôto và stato được đồng tâm để khi quay, chúng không bị va chạm vào nhau. Trong lòng stato người ta khoét các rãnh để đặt các cuộn dây, các cuộn dây này được gọi là các cuộn dây stato, nó có nhiệm vụ tạo ra từ trường quay. Tuỳ theo cấu tạo của các cuộn dây stato mà các rãnh này có thể bằng nhau hoặc có thể rộng, hẹp khác nhau. Để chống dòng fucô sinh nóng động cơ stato không phải được đúc liền một khối mà được ghép bằng lá thép kỹ thuật điện mỏng, bên ngoài của các lá thép được phủ một lớp sơn cách điện.
Đa số các stato đều nằm bên ngoài chỉ trong một số trường hợp đặc biệt stato mới được nằm bên trong (các loại quạt trần). Hình 3.15 mô tả một lá thép stato trong những động cơ thông dụng.
Rôto là một khối thép hình trụ cũng được ghép bằng thép lá kỹ thuật điện mỏng với rãnh ở mặt ngoài. Trong các rãnh có đặt các cuộn dây, gọi là cuộn dây rôto.
Các cuộn dây này có nhiệm vụ sinh ra dòng điện cảm ứng để tác dụng tương hỗ với từ trường quay, tạo thành mômen quay làm quay rôto. Chính giữa tâm của rôto có một trục tròn và thẳng. Trục này sẽ được xuyên qua hai nắp của động cơ ở chỗ ổ bạc hoặc ở bi để truyền chuyển động quay của rôto ra phía ngoài. Rôto này được gọi là rôto quấn dây nó có nhược điểm phải sử dụng bộ góp bằng chổi quét và vành khuyên nên hay hỏng và sinh nhiễu điện từ. Hình 3.16 mô tả một lá thép rôto quấn dây của động cơ điện thông dụng.
Đa số các động cơ không đồng bộ đang sử dụng trong kỹ thuật và đời sống hiện nay đều sử dụng rôto có cuộn dây thường xuyên ngắn mạch. Loại rôto này có mặt ngoài được xẻ thành những rãnh, bên trong các rãnh có các thanh đồng , nhôm hoặc nhôm pha chì được nối với nhau ở hai đầu tạo thành một cái lồng. Loại rôto này được gọi là rôto ngắn mạch hay rôto lồng sóc. Mỗi một đôi thanh nhôm có tác dụng như một khung dây khép kín, cả cái lồng hình thành một cuộn dây ngắn mạch
2.2.2 Nguyên lý làm việc của động cơ không đồng bộ một pha
Động cơ điện xoay chiều một pha là loại động cơ có công suất nhỏ (cỡ 600W trở lại) nó được sử dụng rộng rãi nhất trong kỹ thuật cũng như trong đời sống bởi vì nó dùng được ở mạng điện một pha 110V hay 220V thông dụng (một dây nóng và một
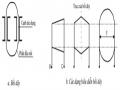
dây nguội). Các động cơ điện xoay chiều một pha có rôto lồng sóc và cuộn dây một pha đặt trong rãnh stato. Bây giờ ta hãy nghiên cứu các cách tạo ra từ trường quay trong động cơ điện xoay chiều một pha.
Nếu trong rãnh lõi thép stato ta chỉ đặt một cuộn dây thì khi cho dòng điện xoay chiều một pha chạy qua trong động cơ chỉ sinh ra từ trường đập mạch (tức là không có từ trường quay). Từ trường này có thể phân tích thành hai loại từ trường quay trong không gian với vận tốc và độ lớn bằng nhau nhưng ngược chiều nhau. Do vậy mụmen quay tổng hợp ở trên rôto bằng không. Kết quả động cơ không thể quay được.
Lúc này, nếu ta dùng tay mồi cho động cơ quay theo chiều nào đó thì nó sẽ quay theo chiều ấy nhưng do có mômen khởi động rất nhỏ nên động cơ quay lờ đờ và gần như không kéo được tải.
3. Các chế độ làm việc của động cơ 3.1.Chế độ làm việc non tải
X 21 R21
Dây quấn stato của động cơ điện tương tụ như dây quấn sơ cấp của máy biến áp,
Trong đó:
Z1 (3.8) tổng trở dây quấn stato
R1 là điện trở dây quấn stato
X1 = 2πfL là điện kháng tản dây quấn stato, đặc trưng cho từ thông tản stato. f- tần số dòng điện stato.
L1- điện cảm tản stato
E1- sức điện động pha stato do từ thông của từ trương quay sinh ra có trị số là: E1 = 4,44fw1kdq1Фmax (1.5)
w1, kdq1 theo thứ tự là số vòng dây quấn và hệ số dây quấn của một pha stato. Hệ số dây quấn kdq1 < 1, nói nên sự giảm sức điện động của dây quấn do quấn rải trên các rãnh và bước rút ngắn, so với quấn tập trung như máy biến áp.
Фmax .Biên độ từ thông của trường quay.
Sơ đồ thay thế rôto
R2
S.X2
I2
E2s
Hình 1.7: sơ đồ thay thế roto
Từ trường chính quay với tốc độ n1, rôto quay với tộc độ n vậy từ trường chính quay đối với dây quấn rôto tốc độ trượt n2 = n1 – n. Như vậy sức điện động và dòng điện trong dây quấn rôto có tần số là:
f2 = pn2 / 60 = spn1 / 60 = sf (1.6)
Tấn số dòng điện rôto lúc quay bằng hệ số trượt nhân với tần số dòng điện stato f. Lúc rôto đứng yên tần số dòng điện rôto là f.
Sức điện động pha dây quấn rôto lúc quay là:
E2s = 4,44f2w2kdq2Фmax = 4,44f.s.W2.kdq2Фmax (1.7)
w2, kdq2 thứ tự là số vòng dây, hệ số dây quấn của roto. Hệ số kdq2 < 1 nói nên sự giảm sức điện động do dây quấn rôto dải trên các rãnh và bước rút ngắn.
Khi rôto đứng yên s = 1; tần số f2 = f. Sức điện động dây quấn rôto lúc đứng yên là: E2 = 4,44f.W2.kdq2Фmax (1.8)
Ta thấy
E2s = sE2 (1.9)
Sức điện động pha rôto lúc quay E2s bằng sức điện động pha rôto lúc không quay nhân với hệ số trượt s.
Cũng tương tự như vậy điện kháng tản dây quấn rôto lúc quay là: X2s = 2πf2L2 = s2πfL2 = sX2 (1.10)
Trong đó L2 là điện cảm tản pha dây quấn roto, X2 = 2πfL2 là điện kháng tản rôto lúc
không quay. Điện kháng tản rôto lúc quay bằng điện kháng tản rôto lúc không quay nhân với hệ số trượt s.
Từ đó ta có tỉ số sđđ pha rôto là: Ke = E1/E2 = w1kdq1 / w2kdq2 (1.11) Ke gọi là hệ số quy đổi sđđ rôto
3.2 Chế độ làm việc quá tải
Khi động cơ làm việc, từ trường quay trong máy do dòng điện của cả hai dây quấn sinh ra.
Dòng điện trong dây quấn stato sinh ra từ trường quay stato quay tốc độ n1 đối với stato. Dòng điện trong dây quấn rôto sinh ra từ trường quay rôto, quay đối với rôto tốc độ:
n2 = 60f2 / p = s60f / p = sn1 (.12)
Vì roto quay đối với stato tốc độ n, cho nên từ trường rôto sẽ quay đối với stato tốc độ là:
n2 + n = sn1 + n = n1(1-s) = n1 (1.3)
Như vậy, từ trường quay stato và từ trường quay rôto không chuyển động tương đối với nhau. Từ trường tổng hợp của máy là từ trường quay tốc độ n1.
Cũng lý luận như ở máy biến áp, từ thông Фmax có trị số hầu như không đổi ứng
với chế độ không tải và có tải. Do đó ta có thể viết được phương trình sức từ của động cơ:
m1w1kdq1I1 – m2w2kdq2I2 = m1w1kdq1I0 (1.14)
Trong đó: I0 là dịng điện stato lúc không tải
I1, I2 là dịng điện stato và rôto khi động cơ kéo tải m1, m2 là số pha của dây quấn stato và roto
Các hệ số m1w1kdq, m2w2kdq2 nói lên từ trường quay quanh do động thời m1 pha stato và m2 pha rôto sinh ra và có xét đến số vòng dây và cấu tạo các dây quấn.
Dấu trừ trước I2 vì ta chọn chiều I2 khơng phù hợp với chiều từ thông theo quy tắc vặn nút chai.
Chia hai vế cho m1w1kdq1 và đặt:
I2 / (m1w1kdq1 / m2w2kdq2) = I2 / ki = I′2 (1.15)
. . .
Ta có:
I 1 I 0 I '2
(1.16)
I′2 là dòng điện rôto quy đổi về stato, hệ số
Ki = m1w1kdq1 / m2w2kdq2 (1.17) Gọi là hệ số quy đổi dòng điện rôto.
Ví dụ 2. Động cơ không đồng bộ ba pha, tần số 50Hz, quay với tốc độ gần bằng 1000vg/ph lúc không tải và 970vg/ph lúc đầy tải.
1. Động cơ có bao nhiêu cực từ ?
2. Tính hệ số trượt lúc dầy tải ?
3. Tìm tần số điện áp trong dây quấn rotor lúc đầy tải ?
4. Tính tốc độ của :
a. Từ trường quay của rotor so với rotor ?
b. Từ trường quay của rotor so với stator ?.
c. Từ trường quay của rotor so với từ trường quay stator ?.
Giải.
Số đôi cực từ của động cơ
p 60f1 60 50 3
n11000
Hệ số trượt khi đầy tải:
s n1 n 1000 970 0.03
n11000
Tần số dòng điện trong rôto khi đầy tải:
f2 sf1 0.03 50 1.5Hz
Tốc độ từ trường quay của roto so với roto:
n2 n1 n 1000 970 30vg / ph
Tốc độ từ trường quay của roto so với stato:
n1 1000vg / ph
Ví dụ 3. Một động cơ không đồng bộ ba pha rotor dây quấn, tần số 50Hz, 6 cực từ 220V có stator đấu và rotor đấu Y. Số vòng dây hiệu dụng rotor bằng một nửa số vòng dây hiệu dụng stator. Hãy tính điện áp và tần số giữa các vành trượt nếu :
a. Rotor đứng yên ?;
b. Hệ số trượt rotor bằng 0,04 ?
Giải.
Điện áp và tần số giữa hai vành trượt khi roto đứng yên:
3
U2 0.5 U1 0.5 220 190.52V
f2 sf1 1 50 50Hz
Khi s = 0.04 ta có:
U2s sU2 0.04 190.52 7.621V
f2 sf1 0.04 50 2Hz
Ví dụ 4. Tốc độ khi đầy tải của động cơ không đồng bộ tần số 50Hz là 460vg/ph. Tìm số cực từ và hệ số trượt lúc đầy tải ?
Giải.
Số đôi cực từ của động cơ:
p 60f1 60 50 6
n1500
Hệ số trượt khi đầy tải: s n1 n 500 460 0.08
n1500
3.3. Chế độ đủ tải
Để thuận tiện cho việc nghiên cứu và tính toán ta thành lập một sơ đồ điện, gọi là sơ đồ thay thế động cơ điện.
Quy đổi roto về stato
E′2 = keE2 = E1 là sđđ pha rôto quy đổi về stato. I′2 = I2 / k1 là dòng điện rôto quy đổi về stato.
ke, ki là hệ số quy đổi sức điện động và hệ số quy đổi dòng điện. R′2 = R2keki là điện trở kháng dây quấn rôto quy đổi về stato
X2′ = X2keki là điện trở kháng dây quấn rôto quy đổi về stato Keki = k là hệ số quy đổi tổng trở
Sơ đồ thay thế chính xác động cơ
R1
Z1
jX1 ![]()
Hình 1.8a: Sơ đồ thay thế máy điện KĐB3 pha
+
ZV ZP Z0
Rfe jXM
_
Sơ đồ thay thế gần đúng
Hình 1.9: sơ đồ thay thế máy điện KDB3 pha
Cũng tương tự như đã nghiên cứu ở máy biến áp hệ phương trình trên là hệ phương trình Kiếcshop cho mạch điện . Mạch điện trên là sơ đồ thay thế động cơ điện không đồng bộ.
Để thuận tiện cho việc tính toán, sơ đồ đó được xem gần đúng tương đương được sử dụng nhiều trong tính toán động cơ điện không đồng bộ, trong đó:
R0 = R1 + Rth (3.22) X0 = X1 + Xth (3.23)
Ngoài ra nếu lam phép biến đổi đơn giản
R'2 S
R'2
R'2 (1S)
S
(1.18)
Sơ đồ thay thế động cơ không đồng bộ trong đó: Rn = R1 + R′2 (1.19)
Xn = X1 + X′2(1.20)
R′(1-s) / s là đặc trưng cho công suất cơ Pcơ của động cơ.
Ví dụ 5. Một động cơ không đồng bộ ba pha 40hp, tần số 60Hz, 4 cực từ, 460V có stator đấu Y đang vận hành ở tốc độ 1447 vòng/phút. Công suất tổn hao phụ ở tải này
là 450W, còn tổn hao cơ là 220 W. Các thông số mạch của động cơ qui đổi về stator như sau:
R1 = 0,1418 ; R’2 = 1,100 ; Rfe = 212,73 ; X1 = 0,7273 ; X’2 = 0,7284 XM = 21,7
Hãy dùng mạch điện thay thế chính xác để xác định (a) tổng trở vào/pha; (b) dòng điện dây stator
Giải
Tốc độ đồng bộ:
n 60f1 60 60 1800vg / ph
1 p 2
Hệ số trượt:
s n1 n 1800 1447 0.1961
n1
Tổng trở tải:
1800
Z R1 s 1.11 0.1961 4.5091
t 2 s 0.1961
Tổng trở mạch từ hóa:
Z RFe jXM 212.73 j21.7
(2.1908 + j21.4765)
M
RFe jXM 212.73 j21.7
Tổng trở vào của một pha:
Z Z
ZM (Z2 Zt)
v 1 Z
M (Z2 Zt)
0.1418 + j0.7273 (2.1908 + j21.4765) (1.1 + j0.7284 4.5091)
(2.1908 + j21.4765) (1.1 + j0.7284 4.5091)
4.9877 + j2.5806 = 5.615827.36o
Dòng điện stato:
I U1 460 42.0029 - j21.732 47.2919-27.36oA
v
1 Z 3 5.615827.36o