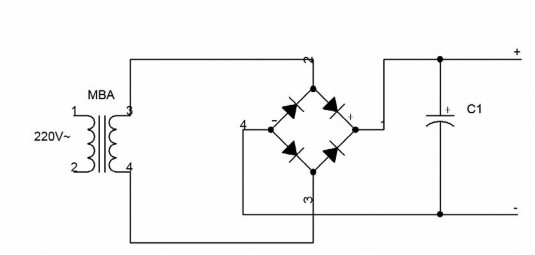
Hình 3.10. Sơ đồ khối tạo nguồn một chiều cho motor
ở trong mô hình tôi sử dụng loại cảm biến nhiệt LM335, cần cung cấp cho nó một nguồn nuôi ổn định là 5V. Để có điện áp ổn định không bị sự ảnh hưởng của nhiễu nguồn xoay chiều tôi đã sử dụng một vi mạch ổn nguồn KA7805 để ổn định
điện áp ra là +5V (hình 3.11).
Các tụ có giá trị như ghi trên hình vẽ, riêng tụ C1 được chọn theo các loại bộ ổn nguồn. Trong sơ đồ này ta chọn loại KA7805 nên tra theo bảng ta chọn C1=2200mF với điện áp nạp là 25V.
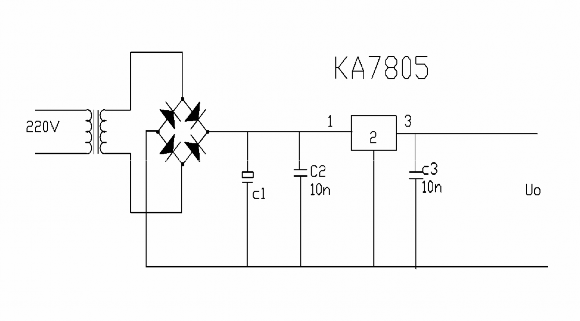
Hình 3.11. Sơ đồ tạo nguồn cho cảm biến
3.4. Xây dựng thuật toán điều khiển mô hình
Từ nguyên lý hoạt động của mô hình khâu tinh lọc trong thựa tế và được thay thế bằng mô hình mô phỏng, tôi đưa ra sơ đồ thuật toán của chương trình điều khiển dây chuyền như sau:
start
Có thể bạn quan tâm!
-

 Xây Dựnh Mô Hình Điều Khiển Khâu “Tinh Lọc Nước Dứa Sau Khi Trích Ép ”
Xây Dựnh Mô Hình Điều Khiển Khâu “Tinh Lọc Nước Dứa Sau Khi Trích Ép ” -
 Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 8
Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 8 -
 Lưu Đồ Phân Bố Thời Gian Tạo Tín Hiệu Mức Thay Thế
Lưu Đồ Phân Bố Thời Gian Tạo Tín Hiệu Mức Thay Thế -
 Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 11
Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 11 -
 Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 12
Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 12
Xem toàn bộ 105 trang tài liệu này.
600C<T <800C
sp
?
Tsp
>800C
Đặt ĐC2
Đặt ĐC2
?
Khóa van nhiệt
Mức 1/3 Tank 1 ?
Đặt ĐC3
Mức đầy Tank 1
Tắt ĐC2,
Đặt ĐC4,ĐC5
Mức cạn Tank 1?
Tắt
ĐC3,ĐC4
1
2
Tắt tất cả động cơ
Đặt tín hiệu thời gian
1
Tín hiệu thời
gian ly tâm đạt yêu cầu ?
Mức 1/3
Tank 2 ?
Mức đầy
Tank 2 ?
Tín hiệu
dõng ?
Đặt ĐC7
Tắt ĐC6
Đặt ĐC6
2
Tín hiệu quá
thời gian ?
END
Đặt đèn báo hiệu sự cố để kiểm tra sản phẩm
Hình 3.12. Sơ đồ thuật toán của mô hình
3.5. Viết chương trình điều khiển
3.5.1. Phân công tín hiệu vào ra cho bài toán
Từ sơ đồ thuật toán ta tiến hành viết chương trình điều khiển trên SIMATIC S7 – 200.
Để thuận tiện cho việc kiểm tra và việc hiểu chương trình thì ta tiến hành phân công tiến hiệu như sau:
ký hiệu | nhiệm vụ | |
tín hiệu đầu vào | ||
1 | I0.0 | Khởi động |
2 | I0.1 | Dừng toàn bộ hệ thống |
tín hiệu đầu ra | ||
10 | Q0.0 | Động cơ bơm sản phẩm ở bình chứa 300lít |
11 | Q0.1 | Van nguồn nhiệt |
12 | Q0.2 | Động cơ bơm sản phẩm đã được gia nhiệt |
13 | Q0.3 | Động cơ quay cánh khuấy bình 1 |
14 | Q0.4 | Động cơ bơm sản phẩm từ bình 1 vào máy ly tâm |
15 | Q0.5 | Động cơ quay ly tâm |
16 | Q0.6 | Động cơ bơm dịch quả đã ly tâm vào bình 2 |
17 | Q0.7 | Động cơ quay cánh khuấy bình 2 |
18 | Q1.0 | Đèn báo cần kiểm tra lại sản phẩm trước khi tiếp tục sản xuất |
3.5.2. Viết chương trình
Sau khi phân công tín hiệu vào ra như trên thì chương trình được viết như sau:
a. Chương trình được viết trên STL như sau:
NETWORK 1 //KHOI DONG LD I0.0
S Q0.0, 1
S Q0.1, 1
R Q1.0, 1
NETWORK 2 //SO SANH NHIET DO GIA NHIET DAT TIEU CHUAN LD SM0.0
MOVD +0, AC0 MOVW AIW0, AC0 DTR AC0, AC0
/R 3276.7, AC0
AR>= AC0, 6.0
AR< AC0, 8.0
S Q0.2, 1
NETWORK 3 //SO SANH NHIET DO QUA NHIET SAN PHAM LDR>= AC0, 8.0
R Q0.1, 1
NETWORK 4 //DAT THOI GIAN CHO MOT ME LD Q0.2
O Q0.4
O Q0.5
O Q0.6
O Q0.7
TON T37, +30000
NETWORK 5 //SO SANH MUC 1/3 BINH 1 LDW>= T37, +3000
S Q0.3, 1
NETWORK 6 //SO SANH MUC DAY BINH 1 LDW>= T37, +9000
R Q0.2, 1
S Q0.4, 1
NETWORK 7 //SO SANH HET MUC 1/3 BINH 1 LDW>= T37, +15000
R Q0.3, 1
NETWORK 8 //SO SANH MUC CAN BINH 1 LDW>= T37, +18000
R Q0.4, 1
S Q0.5, 1
NETWORK 9 //SAN PHAM DA LY TAM XONG LDW>= T37, +21000
R Q0.5, 1
S Q0.6, 1
NETWORK 10 //SO SANH MUC 1/3 BINH 2 LDW>= T37, +24000
S Q0.7, 1
NETWORK 11 //SO SANH MUC DAY BINH 2 LDW>= T37, +30000
R Q0.6, 1
R Q0.7, 1
R T37, 1
NETWORK 12 //DUNG HE THONG LD I0.1
R Q0.0, 1
R Q0.1, 1
R Q0.2, 1
R Q0.3, 1
R Q0.4, 1
R Q0.5, 1
R Q0.6, 1
R Q0.7, 1
R T37, 1