- Có nhiều cách đo nhiệt độ khác nhau, trong đó có thể liệt kê các phương pháp chính như sau:
+ Phương pháp quang dựa trên sự phân bố bức xạ nhiệt độ do dao động nhiệt (hiệu ứng Doppler).
+ Phương pháp cơ dựa trên sự giãn nở của vật rắn, của chất lỏng hoặc chất khí (với áp suất không đổi), hoặc dựa trên tốc độ âm.
+ Phương pháp điện dựa trên sự phụ thuộc của điện trở vào nhiệt độ, hiệu ứng seebeck, hoặc dựa trên sự thay đổi tần số dao động của thạch anh.
Việc đo nhiệt độ được tiến hành nhờ các dụng cụ hỗ trợ chuyên biệt như:
+ Caởp nhieọt ngẫu
+ Nhiệt kế điện thế kim loại
+ Nhiệt điện trở kim loại
+ Nhiệt điện trở bán dẫn
Có thể bạn quan tâm!
-

 Giao Diện Cửa Sổ Lập Trình Của Phần Mềm Step 7 - Micro/win
Giao Diện Cửa Sổ Lập Trình Của Phần Mềm Step 7 - Micro/win -
 Hoạt Động Cụ Thể Của Từng Khâu Trong Dây Chuyền
Hoạt Động Cụ Thể Của Từng Khâu Trong Dây Chuyền -
 Xây Dựnh Mô Hình Điều Khiển Khâu “Tinh Lọc Nước Dứa Sau Khi Trích Ép ”
Xây Dựnh Mô Hình Điều Khiển Khâu “Tinh Lọc Nước Dứa Sau Khi Trích Ép ” -
 Lưu Đồ Phân Bố Thời Gian Tạo Tín Hiệu Mức Thay Thế
Lưu Đồ Phân Bố Thời Gian Tạo Tín Hiệu Mức Thay Thế -
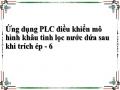
 Sơ Đồ Khối Tạo Nguồn Một Chiều Cho Motor
Sơ Đồ Khối Tạo Nguồn Một Chiều Cho Motor -
 Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 11
Ứng dụng PLC điều khiển mô hình khâu tinh lọc nước dứa sau khi trích ép - 11
Xem toàn bộ 105 trang tài liệu này.
+ Cảm biến thạch anh
Việc sử dụng các IC cảm biến nhiệt để đo nhiệt độ là một phương pháp thông dụng được sử dụng trong các ứng dụng mô phỏng thông thường, nên ở đây tôi chọn phương án sử dụng IC này.
** Nguyên lý hoạt động chung của IC đo nhiệt độ
IC đo nhiệt độ là một mạch tích hợp nhận tín hiệu nhiệt độ chuyển thành tín hiệu điện dưới dạng điện áp.
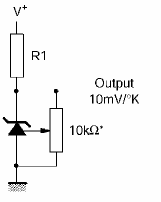
+ Sơ đồ nguyên lý mạch của LM335 như sau:

Dựa vào đặc tính rất nhạy của các bán dẫn với nhiệt độ, tạo ra điện áp hoặc dòng điện, tỷ lệ thuận với nhiệt độ tuyệt đối. Đo tín hiệu điện ta biết được giá trị của nhiệt độ cần đo. Sự tác động của nhiệt độ tạo ra điện tích tự do và các lỗ trống trong các bán dẫn, bằng sự phá vỡ các phân tử, bứt các electron thành dạng tự do di chuyển qua vùng cấu trúc mạng tinh thể tạo sự xuất hiện các lỗ trống, làm cho tỷ lệ
điện tử tự do và lỗ trống tăng lên theo quy luật hàm mũ với nhiệt độ. Các IC cảm biến nhiệt độ có độ chính xác cao, dễ tìm trên thị trường hiện nay, đồng thời nó có những đặc tính phù hợp với thiết kế chi tiết của mạch, và trong mạch này ta dùng loại IC LM335, dưới đây là một số đặc điểm kỹ thuật về LM 335.
* Đặc tính kỹ thuật
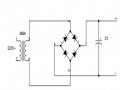
+ Hình dạng bên ngoài
+ Sơ chân nối của nó như sau:
Sơ đồ nhìn từ dưới chân thiết bị
+ V+ và V- là hai đầu nguồn đặt của cảm biến
+ ADJ là chân chuẩn điều kiện làm việc đầu ra của cảm biến.
*Tính chất cơ bản của LM335:
- LM335 có độ biến thiên theo nhiệt độ là: 10mV / 10C
- Độ chính xác cao, tính năng cảm biến nhiệt độ rất nhạy, ở nhiệt độ 250C nó có sai số không quá 1%. Với khoảng đo từ 00C – 1280C, tín hiệu ngõ ra tuyến tính liên tục với những thay đổi của tín hiệu ngõ vào.
- Thông số kỹ thuật:
+ Tiêu tán công suất thấp
+ Dòng làm việc từ 450m A - 5mA
+ Dòng điện ngược 15mA
+ Dòng điện thuận 10mA
+ Độ chính xác : khi làm việc ở nhiệt độ 250C với dòng làm việc 1mA thì
điện áp ngõ ra từ 2,94V - 3,04V.
- Đăc tính điện:
0
Theo thông số của nhà sản xuất, quan hệ giữa nhiệt độ và điện áp ngõ ra như sau: Vout = 0,01xT K
= 2,73 + 0,01xT0C
Vậy ứng với khoảng hoạt động từ 00C - 1000C ta có sự biến thiên điện áp ngõ ra như sau:
out
ë 00C thì điện áp ngõ ra V = 2,73 (V)
out
ë 50C thì điện áp ngõ ra là V = 2,78 (V)
...........................
ë 1000C thì điện áp ngõ ra Vout =3,73 (V)
Khoảng biến thiên điện áp tương ứng là 1V với khoảng nhiệt độ từ 00C – 1000C
** Thiết kế cụ thể mạch cảm biến dùng LM335
+ Sơ đồ mạch như sau:
LM335
Hình 3.2. Sơ đồ mắc không chuẩn hóa
Điện áp đặt ở đây là +5V. Đây là sơ đồ mắc làm việc ở chế độ chưa chuẩn hóa tức là không ở 250C. Ngoài ra ta còn có cách mắc để chuẩn hóa điều kiện chuẩn như sau.
LM335
Hình 3.3. Sơ đồ mắc chuẩn hóa
+ Tính toán và chọn linh kiện Ta có
450m A < IR < 5mA
450m A < (5-V0)/R< 5mA
(5-V0)/5mA < R <(5-V0)/ 450m A Vì : 2,73 < V0 3,73
Mặt khác, theo thông số của nhà sản xuất điện áp trên LM335 tại Tc = 250C,
IR = 1mA thì V0 = 2,98 (V) vậy ta có:
450m A < (5-2,98)/R < 5mA Nên 424 < R < 4,7K
Từ đó ta chọn R = 1K b
**Thiết kế mạch khuếch đại
Để tạo khoảng so sánh tín hiệu lấy ra ứng với điều kiện làm việc của môi trường ta cần một mạch khuếch đại khoảng biến thiên của tín hiệu ra. Đây là mạch so sánh tín hiệu ra của cảm biến với tín hiệu đặt điện áp ứng với điệu kiện làm việc nhiệt độ môi trường ngoài. Vì khoảng biến thiên điện áp của bộ cảm biến là 1V với khoảng biến thiên nhiệt độ từ 00C - 1000C. Trong khi đó, yêu cầu mạch đầu vào của PLC có mức điện áp từ 0V - 10V, vì vậy ta sử dụng mạch khuếch đại tín hiệu điện
áp, với hệ số khuếch đại 10 lần cho đầy mức giới hạn đầu vào của PLC sơ đồ như (hình 3.2).
VR1
V1
V2
V0
Hình 3.4. Sơ đồ mạch khuếch đại
Theo như hình trên thì V+ và V- được tính như sau: V+ = R4 .V2/(R2 + R4)
V- = (V0 – V1) . R5/(R3 + R5) – V1
Vì : V+ = V-
suy ra
R4 .V2/(R2 + R4) = (V0 – V1) . R5/(R3 + R5) – V1
V1 : là điện áp ngõ vào đảo của bộ khuếch đại và V1 = 2,73 V V2 : là tín hiêu ra của cảm biến và V2 = 2,73 + 0,01xT0C
V0 : là điện áp ngõ ra của OA và V0 = K(V2 – V1) K : là hệ số khuếch đại
Như vậy ta xét ở nhiệt độ 00C thì V2 = V1; V0 = 0V
= > R4 /(R2 + R4) = R5 /(R3 + R5)
Để đơn giản ta chọn R2 = R3; R4 = R5 như vậy: V0 = (V2 – V1).R5/R3
Chọn hệ số khuếch đại K = R5 / R3 = 10
Mặt khác ta có dòng của OA là I0 < 20mA, nên dòng hồi tiếp If << 20mA
= > If = (V0 – V1)/(R3 + R5) << 20mA
= > R3 + R5 >> (V0 – V1)/20mA
Mà V0max =10V V1 = 2,73V
= > R3 + R5 >> 2,27/ 20mA
Hay 6R3 >>2,27 / 20mA
= > R3 >>18,4 (Ohm)
Chọn R3 = 1k; R5 = 10k; VR1 = 15k
Do đó R1 = 100 (Ohm)
c. Thieỏt keỏ cảm biến mức chất lỏng
Mục đích của việc đo và phát hiện mức chất lưu là xác định mức độ hoặc khối lượng chất lưu trong các bình chứa. Có hai dạng đo là đo liên tục và xác định theo ngưỡng. Khi đo liên tục, biên độ hoặc tần số của tín hiệu đo cho biết thể tích chất lưu còn lại trong bình chứa. Khi xác định theo ngưỡng, cảm biến đưa ra tín hiệu dạng nhị phân cho biết thông tin về tình trạng hiện tại mức ngưỡng có đạt hay không. Thông thường người ta hay kết hợp cả hai loại đầu đo phát hiện ngưỡng cao và ngưỡng thấp để tự động hóa quy trình cung cấp và hút chất lưu từ bình chứa.
Có nhiều phương pháp để thiết kế cảm biến mức chất lỏng như: phương pháp thủy tĩnh, phương pháp điện, phương pháp bức xạ.
* Trong phương pháp điện thì ta phải sử dụng đến các cảm biến chuyên dụng, cảm biến này chuyển đổi trực tiếp mức thành các tín hiệu điện. Loại này có những cảm biến như cảm biến độ dẫn chỉ dùng cho chất lưu dẫn điện và không có tính ăn mòn, không lẫn thể vẩn cách điện. Cảm biến tụ điện có thể dùng cho cả chất lưu dẫn điện hoặc không dẫn điện.
* Phương pháp bức xạ, ưu điểm của phương pháp này là cho phép đo mức mà không cần tiếp xúc chất lỏng. Ưu điểm này rất thích hợp khi đo mức chất lưu ở những điều kiện khắc nghiệt như nhiệt độ cao, áp suất cao hoặc khi chất lưu có tính
ăn mòn mạnh. Phương pháp bức xạ có những loại như phương pháp đo bằng hấp thụ tia gama, phương pháp đo bằng sóng siêu âm.
* Phương pháp thủy tĩnh, trong phương pháp này cảm biến hoạt động không phụ thuộc vào tính chất điện của chất lưu, có thể đo ở chế độ liên tục hoặc gián đoạn.
+ Nếu đo liên tục ta phải kết hợp với một cảm biến khác chẳng hạn như cảm biến vị trí để xác định sự thay đổi liên tục của mức chất lưu được chuyển đổi thành tín hiệu điện, hoặc cảm biến lực để đo sự thay đổi lực tác động và chuyển đổi sang tín hiệu điện, hay cảm biến vi sai áp suất đo sự thay đổi áp suất. Cụ thể ta có các mô hình sau:
h
Cảm biến vị trí
biến lực
Cảm
h
a/ Cảm biến phao b/ Cảm biến hình trụ treo
p0
k
Khoa Cơ Điện
64
Trường đại học NNI