- Độ cao chênh nhau giữa hai trụ đỡ cũng ảnh hưởng đến độ vòng của đường dây cáp, đối với vùng trồng thanh long ở Miền Tây Nam Bộ địa hình bằng phẳng, nên độ cao chênh nhau giữa 2 trụ không lớn, nên luận án không chọn thông số này.
Tóm lại: Trong luận án này chọn hai thông số ảnh hưởng đến hàm mục tiêu để nghiên cứu đó là chiều dài nhịp ký hiệu là , đơn vị tính là m, lực căng ngang dây cáp ban đầu ký hiệu là H, đơn vị tính là N. Đây là những thông số có thể dễ dàng thay đổi, có giá trị trong sử dụng, còn các thông số khác lấy ở giá trị nhất định theo thiết kế.
4.3. Phương pháp xác định các đại lượng nghiên cứu và thiết bị đo
Việc bố trí thí nghiệm xác định các đại lượng nghiên cứu được tiến hành trên đối tượng nghiên cứu thực nghiệm tại hiện trường, áp dụng phương pháp đo các đại lượng không điện bằng điện thông qua một số loại cảm biến đo tiêu chuẩn của Cộng hòa Liên bang Đức như các cảm biến đo gia tốc, cảm biến đo lực... Kết quả thí nghiệm được ghi lại dưới dạng mã ASCII và được kết nối với máy tính điều khiển bằng các phần mềm Catman, Excel và xử lý bằng phần mềm Dasylab....
X
Xe
Chuyển đổi không điện bằng điện
Chuyển đổi điện - điện
Có thể bạn quan tâm!
-
 Khảo Sát Độ Vòng Của Đường Cáp Hai Trụ Đỡ Có Độ Cao Chênh Nhau
Khảo Sát Độ Vòng Của Đường Cáp Hai Trụ Đỡ Có Độ Cao Chênh Nhau -
 Vùng Tần Số Cộng Hưởng Dao Động Ngang, Dọc Của Giỏ Trên Nhịp
Vùng Tần Số Cộng Hưởng Dao Động Ngang, Dọc Của Giỏ Trên Nhịp -
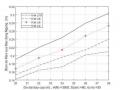 Sự Ảnh Hưởng Của Độ Dài Nhịp Cáp Đến Biên Độ Cực Đại Của Dao Động Giỏ Đựng Thanh Long
Sự Ảnh Hưởng Của Độ Dài Nhịp Cáp Đến Biên Độ Cực Đại Của Dao Động Giỏ Đựng Thanh Long -
 Bố Trí Thí Nghiệm Đo Lực Căng Ngang Và Độ Vòng Đường Cáp
Bố Trí Thí Nghiệm Đo Lực Căng Ngang Và Độ Vòng Đường Cáp -
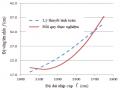 Ảnh Hưởng Của Chiều Dài Nhịp Đến Độ Vòng Của Đường Dây Cáp.
Ảnh Hưởng Của Chiều Dài Nhịp Đến Độ Vòng Của Đường Dây Cáp. -
 Đồ Thị Độ Biên Độ Dao Động Cực Đại Của Giỏ Phụ Thuộc H Và Nhận Xét: Với Các Hàm Hồi Quy Nhận Được Là Hàm Phi Tuyến, Từ Hàm Hồi Qui
Đồ Thị Độ Biên Độ Dao Động Cực Đại Của Giỏ Phụ Thuộc H Và Nhận Xét: Với Các Hàm Hồi Quy Nhận Được Là Hàm Phi Tuyến, Từ Hàm Hồi Qui
Xem toàn bộ 196 trang tài liệu này.
Bộ nhớ
Chỉ thị
Máy tính
Chuyển đổi A/D
Y
Hình 4.1. Sơ đồ cấu trúc dạng khối của thiết bị thí nghiệm
Đại lượng X là đại lượng đo không điện qua chuyển đổi sơ cấp được kết quả Xe, qua biến đổi điện - điện cho đại lượng đầu ra Y dưới dạng điện áp, sau đó qua bộ chuyển đổi tương tự số A/D (Analog Digital Converter) đưa vào bộ chỉ thị, đưa ra bộ nhớ ghi ở dạng mã ASCII và hiển thị trên màn hình.
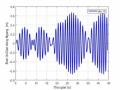
4.3.1. Phương pháp xác định biên độ dao động của giỏ đựng trái thanh long
Để đo biên độ dao động theo phương phương ngang chúng ta gắn đầu đo gia tốc B12/1000 do hãng HBM Cộng hoà Liên bang Đức chế tạo vào giỏ đựng trái thanh long sao cho phương cần đo trùng với phương dao động. Đầu đo gia tốc được nối ghép với thiết bị đo nhiều kênh DMC- Plus và kết nối với máy vi tính. Cho giỏ chuyển động ghi lại được dao động ở dạng biểu đồ. Dùng phần mềm Catman điều
khiển và xác định các đặc trưng động lực học dao động của giỏ đựng trái thanh long.
Đầu đo gia tốc B12/1000 do hãng HBM chế tạo chuyên dùng để xác định gia tốc, sau khi xác định được các giá trị đo gia tốc ta sử dụng phần mềm Dasylab tích phân 2 lần xác định được biên độ dao động cần đo.
Hình dáng và sơ đồ nguyên lý của đầu đo gia tốc B12/1000 được thể hiện ở hình 4.2.
Hình 4.2. Cảm biến đo biên độ dao động B12/1000
1. Khối quán tính; 2. Mặt cắt của hai cuộn dây điện cảm;3. Lò xo lá (phần tử đàn hồi); 4. Thân đầu đo; 5. Cạnh vát; 6. Cọc nối dây; 7. Đầu có ren lắp vào vật đo
Cảm biến được gắn cố định vào giỏ đựng trái trái thanh long. Khi giỏ đựng trái thanh long chuyển động, làm khối quán tính (1) dao động trong hai cuộn dây điện cảm (2), làm cho từ trở của mạch từ thay đổi dẫn đến điện cảm của hai cuộn dây (2) thay đổi. Sự thay đổi điện cảm này sẽ được thiết bị DMC Plus thu thập, khuếch đại lên gấp nhiều lần và được ghi lại vào máy tính. Như vậy, biên độ dịch chuyển của khối quán tính (1) lớn hay nhỏ phụ thuộc vào biên độ dao động dao động của giỏ đựng trái thanh long .
Biên độ dao động cực đại được xác định bằng phương pháp tung độ và điểm, gọi các giá trị biên độ dao động cực đại đo được là: a1, a2, a3…..an (n số lần đo), giá trị biên độ dao động cực đại trung bình (atb) được xác định như sau:
n
ai
atb
i1
n
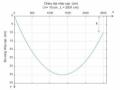
4.3.2. Xác định độ vòng lớn nhất của đường cáp
Để xác định độ vòng đường cáp đề tài luận án sử dụng máy đo thủy bình được thể hiện trên hình 4.3. Sử dụng máy thủy bình ta xác định được chiều cao hA và hC.

Hình 4.3. Thiết bị đo độ vòng - máy thủy bình
Độ vòng được xác định như sau: f= hA- hC ( trường hợp hA= hB), hình 4.4
4.3.3. Xác định lực căng ngang của đường cáp
Để đo lực căng ngang (H), luận án bố trí sơ đồ thí nghiệm như như trên hình 4.4 cảm biến đo lực kéo Z4 của Cộng hòa Liên bang Đức hình 4.5, dải đo lực từ 0 đến 5KN.
B
C
A
4
f
2
7
6
5
3
hc
ha
9
l
1
8
Hình 4.4. Mô hình thí nghiệm xác định lực căng ngang (H) và độ vòng (f) dây cáp bằng cảm biến đo lực và máy đo thủy bình
1- Trụ đỡ cố định; 2 - Dây cáp; 3- Giỏ đựng trái thanh long; 4- Cảm biến đo gia tốc; 5- Puly; 6- Cảm biến đo lực kéo; 7- Palăng xích; 8- Trụ cố định palăng; 9- Trụ đỡ trung gian.
Cách xác định lực căng ngang như sau: Một đầu cảm biến đo lực kéo (6) hình 4.5 được gắn chặt với một đầu của dây cáp, một đầu còn lại của cảm biến gắn chặt với palăng, khi kéo palăng cho dây cáp căng lên, lực căng tác động lên cảm biến đo lực, lực đo hiển thị trên màn hình và được nghi lại trong máy tính, lực đo được hiển thị trên màn hình chính là lực căng dây cáp (T).
Lực căng theo phương ngang (lực căng ngang) được xác định như sau:
H= T cos
(N)
Trong đó: T- lực căng dây cáp (xác định thông qua cảm biến đo lực; α - góc hợp bởi lực căng T với phương ngang;
η - Hiệu suất của puly.

Hình 4.5. Cảm biến đo lực kéo HBM
4.3.4. Xác định vận tốc giỏ đựng trái thanh long và chiều dài nhịp
- Xác định chiều dài nhịp bằng thước mét;
- Xác định vận tốc bằng đồng hồ bấm giây và thước mét .
4.4. Thiết bị khuếch đại và chuyển đổi A/D
Luận án sử dụng bộ khuếch đại tín hiệu DMC-Plus của Cộng hòa Liên bang Đức. Thiết bị này là bộ thu thập và khuếch đại thông tin đo lường kết nối với máy tính như hình 4.6 điều khiển bằng phần mềm Catmant. Thiết bị này thay thế cho bộ khuếch đại K và bộ chuyển đổi A/D (Analog/Digital) trong sơ đồ nguyên lý của phương pháp thí nghiệm. Thiết bị DMC Plus có các modul được chế tạo theo các kênh:
+ Modul DV01: Là modul khuếch đại kiểu dòng một chiều DC, dùng để đo nhiệt độ, nối với cặp nhiệt, các dòng một chiều. Modul này có thể đo được nguồn điện áp với dải đo rất rộng (0,1V ; 1V; 10V; 200V), dải tần 2,2 kHz.
+ Modul DV10: Kiểu khuếch đại dòng một chiều DC, để nối các cầu đủ và bán cầu điện trở, có thể đo điện thế, nguồn điện áp DC, dải tần 4,4 Hz.
+ Modul DV30: Kiểu khuếch đại là tần số 600Hz, dùng để đo các cầu đủ và bán cầu điện trở, đo điện thế, nguồn điện áp DC, dải tần 250 Hz.
+ Modul DV35: Kiểu khuếch đại là tần số, thích hợp để đo điện trở, nguồn điện áp DC, dải tần 250 Hz.
+ Modul DV55: Kiểu khuếch đại là tần số, khoảng khuếch đại là 4,8 kHz, rất thông dụng. Dùng để nối với các cầu đủ và bán cầu điện trở, đo điện áp các nguồn áp DC, dải tần 2,2 kHz.
+ Modul DZ65: Dùng cho việc nối các cảm biến đo mô men và tốc độ, công suất.

Hình 4.6. Thiết bị DMC Plus
4.5. Phương pháp xử lý kết quả thí nghiệm
4.5.1. Xác định số lần thí nghiệm
Để kết quả thí nghiệm chính xác chúng tôi tiến hành thí nghiệm theo từng lô, mỗi lô có ba thí nghiệm. Theo định luật số lớn thì phân bố xác suất trung bình mẫu tiệm cận chuẩn [6], [7], [8]. Công thức ước lượng mẫu tổng thể là:
n
S S
PX u/ 2 .
m X u/ 2 .
1
n
Trong đó: X - trị số trung bình mẫu tổng thể;
S - tiêu chuẩn mẫu;
- mức ý nghĩa, = 0,05 ; 1 - = 0,95 tra bảng uα/2 = 1,96.
n
Nếu gọi là sai số tuyệt đối của ước lượng, ta có:
S
u12
P
X m
X 1
Dung lượng mẫu cần thiết là:
nct
u/ 2
S 2 104
(4.1)
2
X 2 %
c
Trong đó c% sai số tương đối của ước lượng, lấy c% = 5%.
4.5.2. Xác định mô hình toán học
Hàm mục tiêu được biểu thị bằng mô hình toán học là phương trình hồi quy bậc 2 dạng tổng quát như sau [6], [7], [9].
k k 1 k k
y b
b .X . b .X .X b .X 2
(4.2)
0
i i ij i j ii i
i1
i1
ji1
i1
N
Các hệ số: b k N 2
0 a Yu P. Xiu
.Yu
u1
i1 u 1
N N
bi = e.
u 1
Xiu .Yu ; bij =g.
u 1
Xiu .X ju .Y u
ju
N K N N
u
X
Yu
bii = c.
Xiu
2 .Y
d.
2 p.Yu
u1
i1 u1
u1
Trong đó: K - số yếu tố ảnh hưởng; b0, bi, bij, bii - hệ số hồi quy; j = i + 1; N - số thí nghiệm; i - chỉ số của yếu tố.
4.5.3. Kiểm tra tính đồng nhất của phương sai
Kiểm tra tính đồng nhất của phương sai theo tiêu chuẩn Kohren.
G S 2
/ S 2
(4.3)
N
tt m
u
u1
Trong đó: S2m - phương sai lớn nhất trong tổng số thí nghiệm;
S2u - phương sai thực nghiệm thứ u với số lần lặp lại mu.
1 mu 2
S 2
u
.Y Y
(4.4)
mu 1
ui u
i1
Trong đó: mu - số lần lặp lại ở mỗi điểm thí nghiệm thứ u;
Yui - giá trị của thông số ra ở điểm u;
u
Y - giá trị trung bình thông số ra tại điểm u.
1
m
Yu
u
m
u
.Yiu
i1
(4.5)
Thay công thức (4.5); (4.4) vào (4.3), xác định được giá trị Kohren theo tính toán Gtt, so sánh với giá trị Kohren tra bảng Gb.
Nếu Gtt < Gb thì giả thiết H0 không mâu thuẫn với số liệu thí nghiệm, phương sai ở các thí nghiệm coi là đồng nhất cường độ nhiễu là ổn định khi thay đổi các thông số thí nghiệm.
4.5.4. Kiểm tra giá trị có nghĩa của hệ số hồi quy
Các hệ số hồi quy b0; bi; bij; bii của phương trình (4.2) được kiểm tra mức ý nghĩa theo tiêu chuẩn Student: Ti = bi / Sbi.
Trong đó: Sbi - phương sai của hệ số hồi qui, các hệ số chỉ có nghĩa khi Ti > Tb, trong đó Tb giá trị tra bảng theo tiêu chuẩn Student.
4.5.5. Kiểm tra tính tương thích của phương trình hồi quy
Sau khi kiểm tra giá trị có ý nghĩa của hệ số hồi quy ta được phương trình hồi quy thực nghiệm và chúng cần phải được kiểm tra theo tiêu chuẩn Fisher:
S2
S
2
Ftt
e
(4.6)
Trong đó: S2 - phương sai tuyển chọn được tính theo công thức sau:
2
2 1 N ˆ
S =
N k
. Yu Yu
u 1
e
S 2 - phương sai do nhiễu tạo nên và xác định theo công thức:
S2 =
1. N 2
e S u
N u 1
Sau khi xác định được tiêu chuẩn Fisher theo công thức (4.6) so sánh giá trị tra bảng Fb, nếu Ftt < Fb, thì mô hình tương thích và ngược lại mô hình không tương thích.
4.5.6. Kiểm tra khả năng làm việc của mô hình hồi quy
Mô hình hồi quy được xây dựng nhằm mục đích dự báo giá trị hàm Y tại các toạ độ được quan sát, phép kiểm tra để khẳng định mô hình có thực sự phản ánh ảnh hưởng của các yếu tố đến hàm mục tiêu hay không. Mô hình có khả năng làm việc khi giá trị dự báo Y ở toạ độ nào đó là chính xác có sai số nhỏ hơn ít nhất hai lần so với việc gán cho toạ độ đó có giá trị trung bình Y tính theo toàn bộ thí nghiệm.
Y 1N
Nm
Yui
1N Y
N u
m
u1 i1 u1
Để đánh giá khả năng làm việc của mô hình dùng hệ số đơn định (R2) và được tính theo công thức:
![]()
1
e
2 m( N k )S 2 N( m 1)S 2
RN
(4.7)
m( Y Y )2 N( m 1)S 2
u e
u1
Mô hình có khả năng làm việc khi R2 0,75.
4.5.7. Chuyển phương trình hồi quy về dạng thực
Để mô tả sự ảnh hưởng của các tham số đầu vào đến chỉ tiêu nghiên cứu cần đưa phương trình hồi qui về dạng thực với các biến là các thông số tự nhiên có thứ nguyên.
n n n
Y = a0+ ai.Xi.aij.Xi.X j
i1
i1
ji
Các hệ số hồi qui a0; ai; aji được xác định theo hệ số hồi qui dạng mã
n
a0 = b0-
bi .Xio
n
n
bij .X0i .X0 j
;
aii
bii
2
i1 1
i1
ji i j i
b1 n
bij
.bii .X
.bij
aj = .
2 0i
i j ;
aij .
(i j )
1 j1 i j i i j
Xi - là giá trị thực của tham số đầu vào.
4.6. Tổ chức tiến hành thí nghiệm
4.6.1. Tổ chức thí nghiệm
Đề tài tiến hành thí nghiệm như sau: Cố định một đầu cảm biến đo lực vào trụ cố định, đầu còn lại của cảm biến đo lực được gắn chặt với dây cáp, đầu còn lại của dây cáp được móc palăng, palăng xích được cố định vào trụ (Sơ đồ bố trí thí nghiệm đo như hình 4.4). Trên dây cáp treo giỏ đựng trái thanh long với kích thước nhất