Do (A B )
là véctơ vuông góc với mặt phẳng S, nên vuông góc với. Từ (c)
vBA
A
B
suy ra: A B
Chú ý 2: Từ cách xác định vận tốc một điểm của vật rắn quay quanh một trục cố định, ta dễ dàng xác định véctơ
vBA
bằng hình học.
vBA
Phương vuông góc với BA Chiều hướng theo chiều quay Trị số vBA = .AB
Hình 1.30
hc hc ABvB ABvA | (1.37) |
Có thể bạn quan tâm!
-

 Cơ học ứng dụng - 1
Cơ học ứng dụng - 1 -
 Cơ học ứng dụng - 2
Cơ học ứng dụng - 2 -
 Khảo Sát Chuyển Động Của Các Điểm Thuộc Vật
Khảo Sát Chuyển Động Của Các Điểm Thuộc Vật -
 Các Định Lý Hợp Vận Tốc, Hợp Gia Tốc
Các Định Lý Hợp Vận Tốc, Hợp Gia Tốc -
 Thông Số Làm Việc Chủ Yếu Của Bộ Truyền Bánh Răng
Thông Số Làm Việc Chủ Yếu Của Bộ Truyền Bánh Răng -
 Lực Liên Kết - Lực Hoạt Động - Phản Lực Liên Kết
Lực Liên Kết - Lực Hoạt Động - Phản Lực Liên Kết
Xem toàn bộ 180 trang tài liệu này.
Định lí 2: Hình chiều vận tốc hai điểm bất kì của hình phẳng S chuyển động phẳng lên đường thẳng nối hai điểm đó thì bằng nhau.
Thực vậy:
Chiếu đẳng thức (1.36) lên trục AB ta được:
hcABvB hcABvA hcABvAB
vAB
ABvAB
Do AB , nên hc = 0 vậy định lí được chứng minh
c. Tâm vận tốc tức thời
Định nghĩa: Điểm P trên hình phẳng S mà tại thời điểm khảo sát có vận tốc bằng không, gọi là tâm vận tốc tức thời.
Định lí 3: Ở mỗi thời điểm nếu 0 có một điểm duy nhất thuộc hình phẳng S
có vận tốc bằng không.
Trước hết ta chứng minh sự tồn tại của tâm vận tốc tức thời. Giả sử biết vận tốc
vA và vận tốc góc (Hình 1.31)
![]()
Hình 1.31 | Hình 1.32 0 |
Quay véctơ vA
quanh A theo chiều của đi một góc 90
ta được nửa đường
thẳng AB. Trên AB lấy một điểm P sao cho:
AP
1
vA
Khi đó:
vPA vA
Mặt khác theo công thức (1.36):
vp vA vPA vA vB 0
Bây giờ ta chứng minh tính duy nhất của tâm P bằng phương pháp phản chứng.
giả sử có hai điểm P1 và P2 mà tại thời điểm khảo sát có tính chất
vp1
vP2
0 khi đó:
1
2
vp2 vP1 vp p Đó là một điều vô lí vì Vậy: P1 P2.
1
vp p2 .p1 p2 0 .
d. Sự phân bố vận tốc các điểm
Ta xét sự phân bố vận tốc các điểm của tấm phẳng S chuyển động phẳng. Có hai khả năng có thể xảy ra tại môi trương điểm:
Khả năng 1: 0
Lấy tâm vận tốc tức thời P làm cực. Xét vận tốc của một điểm M bất kì thuộc hình phẳng S. Ta có quan hệ vận tốc.
vM vP vMP vMP
Phương vuông góc với MP
vM vMP
Chiều hướng theo chiều
Trị số
vMP = .MP
Vậy khi
0 , vận tốc tức thời của hình phẳng S
phân bố giống như S đang quay quanh tâm vận tốc tức thời P với vận tốc góc (Hình 1.32)
Người ta nói rằng hình phẳng S quay tức thời quanh P.
Khả năng 2: 0
Xét vận tốc hai điểm M, N bất kì của hình phẳng S.
Ta có
vM vN vMN
Hình 1.33
Do vMN = MN. = 0, nên vM
vN . Vậy khi 0
, vận tốc tức thời của các điểm của hình phẳng S đều bằng nhau (Hình 1.33).
Người ta nói rằng hình phẳng S chuyển động tịnh tiến tức thời.
Như vậy, tại mỗi thời điểm, hình phẳng S hoặc quay tức thời quanh tâm vận tốc
tức thời P (khi
0 ) hoặc chuyển động tịnh tiến tức thời (khi =0). Chú ý rằng
chuyển động tức thời của hình phẳng chỉ nói lên tính chất của vận tốc. Tuyệt đối không được từ đó suy ra tính chất của gia tốc.
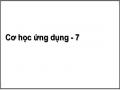
e. Quy tắc thực hành tìm tâm vận tốc tức thời
Dựa vào các kết quả ở trên đưa ra ở đây một số quy tắc thực hành tìm tâm vận tốc tức thời.
Trường hợp 1: Biết vận tốc điểm A và phương vận tốc điểm B. Hai phương này
không song song với nhau.
Dựa vào tính chất vA PA , vB PB từ A và B ta kẻ tương ứng các đường
vA
vuông góc với và . Giao điểm của chúng là tâm vận tốc P (Hình 1.34a).
vB
Hình 1.34
Trường hợp 2: Biết vận tốc hai điểm A và B, chúng có phương song song với nhau. Dựa vào tính chất
vA PA vB PB
Ta thấy tâm vận tốc tức thời P chính là giao điểm của đường AB với đường nối
các đầu mút các véctơ vA và vB , (Hình 1.34b và 1.34c). Trường hợp giao điểm ở vô
cùng, tấm phẳng thực hiện chuyển động tịnh tiến tức thời (Hình 1.34d và 1.34đ).
Trường hợp 3: Biết một điểm của hình phẳng có vận tốc bằng không.
Khi chuyển động phẳng là chuyển động lăn không trượt của thiết diện phẳng S trên một đường cố định thì tiếp điểm tiếp xúc có vận tốc tức thời bẳng không. (vì các tiếp điểm của hai vật khi không trượt trên nhau phải có
cùng một vận tốc, mà vật thứ hai cố định). Vì vậy điểm Hình 1.35
của vật tiếp xúc với mặt tựa chính là tâm P (Hình 1.34e).
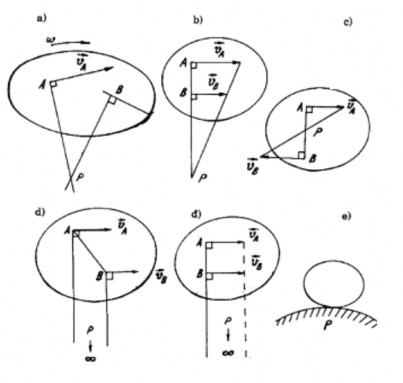
Ví dụ 1.4. Tìm vận tốc của điểm M trên vành của bánh xe bán kính R lăn không
.
v
trượt trên đường thẳng. Cho biết vận tốc tâm C của bánh xe là
Bài giải
Vì bánh xe lăn không trượt trên đường thẳng, nên điểm tiếp xúc giữa bánh xe và mặt đường là tâm vận tốc tức thời P (Hình 1.35).
Vận tốc góc của bánh xe là:
vc vc
PC R
Vận tốc của điểm M:
vM PM
vc 2R cosR 2v
R c
cos
3. Gia tốc các điểm
a. Biểu thức giải tích xác định gia tốc của một điểm
Đạo hàm biểu thức vận tốc (1.33) ta được:
xBxA
sin
cos
2 cos
sin B
yy cos
sin sin cos
(1.38)
B A
B
b. Quan hệ gia tốc giữa hai điểm
Định lý 4: Gia tốc của điểm B tùy ý thuộc hình phẳng S chuyển động phẳng, bằng tổng hình học gia tốc của điểm cực A và gia tốc của điểm B trong chuyển động quay của hình phẳng S quanh A.
n
aB aA aBA aA a BA a BA
(1.39)
Chú ý 1: Từ các hệ thức (1.38) ta có thể nhận được hệ thức (1.39) bằng một vài biến đổi toán học không phức tạp.
Chú ý 2: Từ cách xác định thành phần gia tốc tiếp, gia tốc pháp của một điểm
thuộc vật rắn quay quanh một trục cố định, ta dễ dàng xác định các véc tơ: bằng hình học (Hình 1.36).
a BA , an BA
a BA
Phương AB
Chiều phù hợp với chiều của
a
BA
Trị số t .AB
an BA
Hướng từ B đến A
Trong đó:
a
BA
Trị số n
2
.AB
a AB ;
AB
an
BA
v
BA
Hình 1.36
c. Tâm gia tốc tức thời
Định nghĩa: Điểm Q trên hình phẳng S mà tại thời điểm khảo sát có gia tốc bằng 0 gọi là tâm gia tốc tức thời.
Định lý 5: Ở mỗi thời điểm nếu ω và ε không đồng thời triệt tiêu, có một điểm duy nhất thuộc hình phẳng S có gia tốc bằng 0.
Chứng minh: Sự tồn tại của tâm Q. Giả sử biết
aa ,,,..
Quay véc tơ aa
tg
2
quanh A theo chiều một góc α.
Ta được nửa đường thẳng AB (Hình 7.12). Trên AB lấy một điểm Q sao cho:
AQ
Như thế:
aA
4 2
aQA aA . Vậy ta có:
Hình 1.37
aQ aA aQA 0
Ta chứng minh sự duy nhất của tâm Q bằng phương pháp phản chứng. Giả sử có hai điểm Q1 và Q2 mà tại thời điểm khảo sát:
Q
Q
a a 0
1 2
Khi đó hệ thức:
aQ aQ aQ Q
2 1 1 2
Là điều vô lý, vì:
aQ Q
0 . Vậy Q1 Q2
1 2
Chú ý:
- Khi ω và ε không đồng thời triệt tiêu thì Q là một điểm giới nội;
- Khi ω và ε đồng thời triệt tiêu thì Q → ∞;
- Nói chung, tâm vận tốc tức thời P và tâm vận tốc tức thời Q của hình phẳng S không trùng nhau
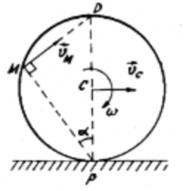
Ví dụ 1.5: Tại một thời điểm nào đó, tâm O của bánh xe lăn không trượt trên đường ray thẳng có vận tốc v0 = 1m/s và gia tốc a0 = 1.5m/s2, (Hình 1.38). Bán kính bánh xe R = 0.5m. Hãy xác định tâm gia tốc tức thời Q tại thời điểm đó.
Bài giải:
Do P là tâm vận tốc tức thời, ta có:
v0 2 / s R
Hình 1.38
Gia tốc góc của bánh xe: a0 3/ s2
R
Chiều của ω và ε cho trên hình 1.38
Quay véc tơ a0
theo chiều của đi một góc α:
tg
2
3 0.75 37o
4
Ta được nửa đường thẳng OA. Trên đó lấy một điểm Q mà
4 2
OQ ao
0.4m
Điểm Q đó là tâm gia tốc tức thời.
Chú ý: Khi a0 = 0 thì ε = 0 và do đó α = 0o; OQ = 0. Như vậy khi vận tốc tâm O của bánh xe luôn không đổi thì điểm O đó là gia tốc tức thời.
v0
A
0
vA
600
v
B
B
vBA
Ví dụ 1.6
Tay quay OA có chiều dài r = 0,1 m quay
đều với vận tốc góc
0 30
rad / s . Con trượt
![]()
B chuyển động theo phương ngang. Cho chiều
dài của thanh truyền AB là
l r
3 . Tại thời O
điểm đang xét tay quay OA vuông góc với thanh truyền AB (hình 1.39).
Hình 1.39
Hãy: - Xác định vận tốc con trượt B và vận tốc thanh truyền AB.
- Tính gia tốc của con trượt B và gia tốc góc của thanh truyền AB.
Bài giải:
1) Phân tích: Khâu OA chuyển động quay quanh trục cố định O. Thanh truyền AB chuyển động song phẳng, còn con trượt B chuyển động tịnh tiến. Tay quay OA làm với hướng ngang một góc 600.
2) Vận tốc: Tính vận tốc điểm B khi chọn A làm cực:
![]()
vB vA vBA
(a)
![]()
Véc tơ vA có chiều như hình 1.40 và có giá trị:
vA 0OA 0r
![]()
![]()
![]()
![]()
Các véc tơ vB và vBA có phương: vB có phương dọc trục Ox còn vBA có phương
![]()
vBA cos30 v
A
vuông góc với BA (tức phương AB ):0
Do đó:
vB
vA
cos 300
0r 2 33
![]()
2
m / s
![]()
![]()
Để tìm giá trị của vBA ta chiếu hai vế của đẳng thức (a) lên phương vuông góc với vB , tức lên phương thẳng đứng:
0 vA cos 60 v cos30
0 0
BA
Từ đó tính được:
cos 60 0
0
vBA vA cos 300 =vAtg30
0 3
r 3
Vận tốc góc của thanh AB bằng:
vBA
0 10
rad / s
0r 3
BA 3l 3
Tại thời điểm đang xét thanh AB quay thuận chiều kim đồng hồ.
Để tìm vận tốc điểm B cũng có thể sử dụng định lí hình chiếu vận tốc:
![]()
0
hcAB vB hcAB vA vB cos30 vA
Kết quả tìm được trùng với kết quả trên.
Để giải bài toán trên cũng có thể sử dụng phương pháp tâm vận tốc tức thời. Tâm vận tốc tức thời của thanh AB tại thời điểm khảo sát là giao điểm của OA với đường thẳng đứng qua B (hình 1.40).
P
v0
A
0
vA
600
v
B
B
Hình 1.40
vBA
Ta có:
vB 0r 0
PA ltg600 3 10
rad / s
Vận tốc điểm B được tính theo công thức:
v PB 0
1 2
r3
![]()
3 3
m / s
B 3 cos 6003
Gia tốc của điểm B:
a a at an
B A BA BA
![]()
(b)
giá trị:
Thành phần aA
hướng từ A đến O và có
2 2
aA r.0 0,130O
giá trị:
902
![]()
BA
Thành phần an
m / s2
hướng từ B đến A và có
an 2
BA 1020,1 3 10 32
m / s2
![]()
![]()
BA BA
![]()
a
BA
Thành phần t hướng vuông góc với AB tại B, có chiều chưa biết (chọn một
chiều xác định, nếu đáp số dương thì chiều đã chọn là đúng, nếu đáp số âm thì chiều ngược lại với chiều đã chọn) và có trị số:
3
a
BA
t .BA r m / s2
Phương chiều của các véc tơ trong đẳng thức (a) cho trên hình 1.41.
Để tìm giá trị của gia tốc điểm B ta chiếu đẳng thức (b) lên phương AB:
a cos 300 an
Từ đó:
B BA
an 10 32 2 2
aB BA 20m / s
cos 3003
2
![]()
Khi chiếu đẳng thức (a) lên phương thẳng đứng (vuông góc với aB ) ta nhận được:
0 an cos300 an cos 600 at sin 600
A BA BA
Từ đó:
at an an tg300 902 102 802
m / s2
BA A BA
Ta dễ dàng tìm được gia tốc của thanh AB:
t
a
802
800 32 2
![]()
BA
rad / s A
3
BA 0,1 3
a
Chiều của gia tốc góc n A
![]()
a
BA
phù hợp với chiều của t , tại
aBA
thời điểm khảo sát có chiều ngược chiều kim đồng hồ. Thanh O AB tại thời điểm khảo sát chuyển động chậm dần.
Hình 1.41
n t
a
a
BA BA
aB
a
n B
A
1.3. HỢP CHUYỂN ĐỘNG CỦA ĐIỂM- VẬT RẮN
1.3.1. Hợp chuyển động của điểm
1.3.1.1. Khái niệm
1. Mô hình bài toán
Điểm M chuyển động đối với hệ quy chiếu động Oxyz. Thông thường hệ quy chiếu động Oxyz này được gắn liền với một vật S nào đó (Hình 1.42). Hệ quy chiếu động Oxyz chuyển động đối với hệ quy
chiếu cố định O1x1y1z1.
Bài toán đặt ra là khảo sát chuyển động của điểm M đối với hệ quy chiểu Oxyz đang chuyển động đối với hệ quy chiếu O1x1y1z1.
2. Định nghĩa chuyển động tuyệt đối, tương đối và chuyển động theo
a. Chuyển động tuyệt đối
Chuyển động của điểm M đối với hệ
quy chiếu cố định O1x1y1z1 được gọi là
Hình 1.42
chuyển động tuyệt đối. Vận tốc, gia tốc của điểm M trong chuyển động tuyệt đối