2. Điều khiển trình tự dùng Stepladder
Stepladder, gọi tắt là STL, là công cụ điều khiển rất hiệu quả. Kỹ thuật lập trình này tương tự với sự sơ đồ biểu diễn sơ đồ chức năng của hoạt động trình tự, thay thế phương pháp dùng tổ hợp logic truyền thống. Lập trình Stepladder có đặc điểm làm cho việc điều khiển trình tự được đơn giản như sau:
Khả năng giữ được trạng thái hiện hành hờ dùng cờ có khả năng chốt.
Tự động vô hiệu (reset)trạng thái trước đó khi chuyển vào trạng thái hiện hành .
Dễ dàng phân nhánh song song cả dạng OR và AND. Kỹ thuật lập trình này được hỗ trợ thông qua cờ trạng thái S.
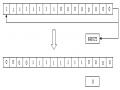
Trước khi khảo sát lập trình Stepladder,ta cần xem qua một ví dụ cho thấy mối quan hệ giữa stepladder với sơ đồ chức năng ở hình 2.31. Sơ đồ chức năng ở hình
2.31 (a) mô tả trình tự các bước hoạt động (trạng thái ). Nó cho thấy được trình tự các bước, hoạt động từng bước và các điều kiện chuyển bước trong chuỗi trình tự. Và trình tự này có thể thực hiện bằng lập trình stepladder .
a) Hoạt động của mạch trình tự STL
Trạng thái S10, trạng thái khởi tạo,được kích hoạt khi công tắc X0 đóng. S10 kích ngõ ra Y0 và có công tắc chuyển trạng thái X1. Khi công tắc X1 đóng (do kích Y0) trạng thái S11 được kích hoạt và tự động vô hiệu trạng thaí trước đó S10, khi đó, S11 được chốt và trở thành trạng thái hoạt động. Tuơng tự S11 cũng có công tắc điều khiển chuyển trạng thái S12. Việc vô hiệu và chốt trạng thái được thực hiện tự động bởi cơ chế điều khiển STL. Thứ tự STL là tùy chọn, ví dụ, cờ trạng thái S20 có thể thay thế cho S10 trong ví dụ trên .
Có thể bạn quan tâm!
-
 Nhóm Lệnh Xử Lý Số Học Và Logic Lệnh Add
Nhóm Lệnh Xử Lý Số Học Và Logic Lệnh Add -
 Hướng dẫn lập trình PLC Mitsubishi - 9
Hướng dẫn lập trình PLC Mitsubishi - 9 -
 Hướng dẫn lập trình PLC Mitsubishi - 10
Hướng dẫn lập trình PLC Mitsubishi - 10 -
 Các Bài Tập Dạng Cơ Bản: Bài 1. Đơn Vị Phục Vụ:
Các Bài Tập Dạng Cơ Bản: Bài 1. Đơn Vị Phục Vụ: -
 Hướng dẫn lập trình PLC Mitsubishi - 13
Hướng dẫn lập trình PLC Mitsubishi - 13 -
 Các Bài Tập Dạng Trung Bình Bài 1. Tín Hiệu Nút Nhấn
Các Bài Tập Dạng Trung Bình Bài 1. Tín Hiệu Nút Nhấn
Xem toàn bộ 202 trang tài liệu này.
Phần sau sẽ trình bày chi tiết hơn về kỹ thuật lập trình STL
Ví dụ về điều khiển trình tự dùng Stepladder
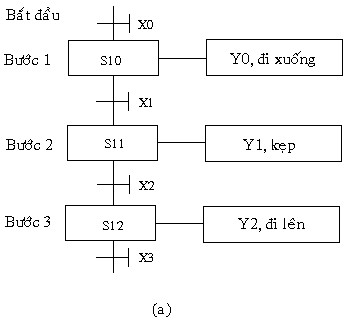
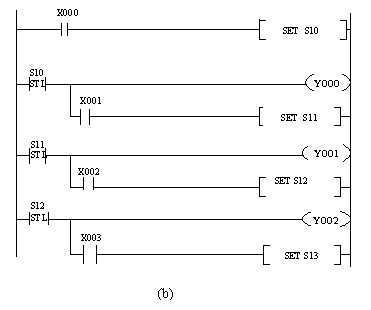
Hình 2.31. (a) Biểu diễn sơ đồ chức năng một chương trình đơn giản
(b) Chương trình dùng Stepladder
b) Lệnh STL và lập trình STL Lệnh STL (Stepladder)
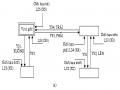
Lệnh STL thể hiện dưới dạng công tắc STL cho phép đóng hay mỡ các trạng thái theo trình tự. Hình 2.32 (a) trình bày mạch Stepladder cơ bản; hình 2.32 (b) là mạch thực hiện chức năng tương đuơng bằng cách dùng lệnh cơ bản
Trong hình 2.32 ngõ ra Y1 được kích hoạt khi công tắc Sa và Sb đóng. Sau đó, nếu công tắc Xc đóng, trạng thái Sd trở thành hoạt động và công tắc tuơng ứng sẽ đặt xuống (reset) trạng thái Sa. Điều này làm hở công tắc Sa ban đầu, và trạng thái ban đầu bị vô hiệu. Tuy nhiên, lệnh SET Y1 và SET Sd có tác dụng tự chốt Y1 và Sd, chúng sẽ giữ trạng thái hoạt động trừ khi nó được vô hiệu bỡi lệnh RST ở đâu đó trong chương trình. Tác động đó thực tế xảy ra đối vối Y1: khi cờ M105 là ON, ở cuối chương trình khi có cạnh lên công tắc Sd ,do lệnh PLS, nó thực hiện đặt ở đầu chương trình thông qua mạch công tắc M105. Lưy ý về cờ Master Control, M106, hình 2.32 (b). Khi lệnh MC M106 hoạt động, đoạn chương trình giữa gặp lệnh MC M106 và MCR M106 sẽ hoạt động bình thường.
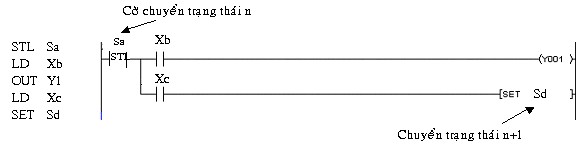
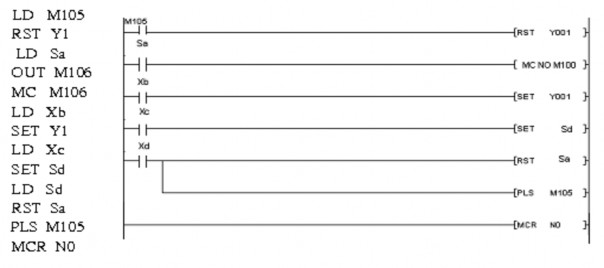
Hình 2.32: Cơ chế Stepladder – (a): Mạch cơ bản STL;
(b): Mạch tương đương dùng lệnh cơ bản
Như vậy, mạch STL đựơc phát triển từ cờ điều khiển MC và MCR. Nó cho phép trạng thái hoạt động thành trạng thái hiện hành, thực hiện tác vụ trong trạng thái đó và chuyển trạng thái khi thỏa điều kiện. Các đặc điểm này làm cho kỹ thuật lập trình STL là công cụ chuyên dùng cho hệ thống điều khiển trình tự.
Lập trình dùng STL
Hình 2.33 cho thấysự ứng dụng cờ STL điều khiển trình tự hai bước. Sau công tắc STL, công tắc thường đóng và thường mở được sử dụng để biểu diễn logic trong bước hiện hành. Tương tự áp dụng cho các trạng thái tiếp theo. Kết thúc đoạn chương trình STL bằng lệnh RET.
Hình 2.33. Chương trình STL
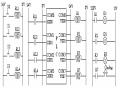
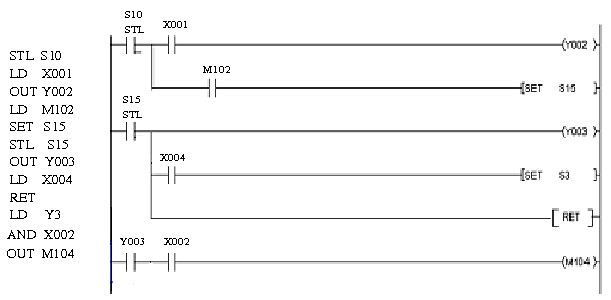
c) OR nhánh STL (chọn nhánh song song )
Hình 2.34 sơ đồ chức năng và chương trình ladder để chọn giữa hai nhánh a và b, tùy thuộc điều kiện vào nhánh, X1 hay X4. Cả hai nhánh điều có chung trạng thái ra là S16.

Hình 2.34:Chọn nhánh hoạt động trong chương trình STL
Phân nhánh
Lập trình chọn nhánh bằng cách OR các điều kiện sau trạng thái S11. Vì thế, nếu X1 là ON sau S11, trạng thái S12 kích hoạt và nhánh A được chọn. Tương tự, nếu X4 lên ON, trạng thái S14 được kích hoạt và nhánh B được chọn. Trạng thái trước đó S11 tự động vô hiệu khi S12 hay S14 được kích hoạt.
Hợp nhánh
Trạng thái chung S16 được kích hoạt từ trạng thái S13 thuộc nhánh A hay S15 thuộc nhánh B. Trạng thái trước đó, S13 hay S15 bị vô hiệu tự động từ S16 bởi cơ chế điều khiển STL. Việc hợp nhánh được thực hiện bằng cách lập chương trình các điều kiện X3 và X6. Thực hiện tương tự như thêm các nhánh khác.
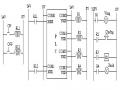
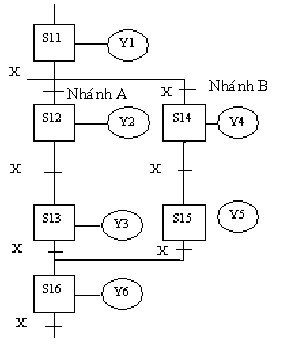
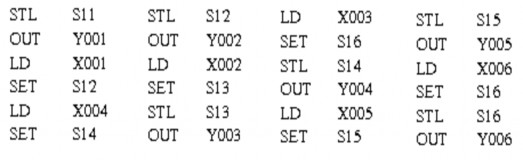
d) AND nhánh STL (phân nhánh song song )
Hình 2.35 minh họa cấu trúc đa nhánh A và B, việc thực hiện vào nhánh và ra nhánh được thực hiện đồng thời như là thực hiện nhánh đơn. Khi đang ở trạng thái S11, điều kiện X1 thỏa, sẽ kích đồng thời cả hai trạng thái S12 và S14, vô hiệu S11; hai nhánh A và B được thực hiện đồng thời.
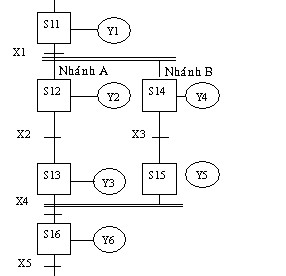
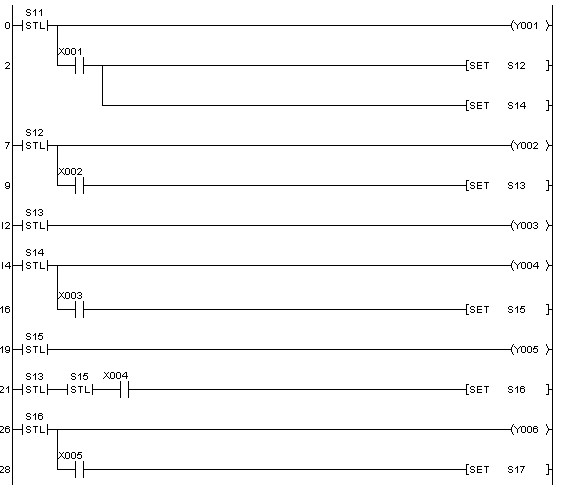
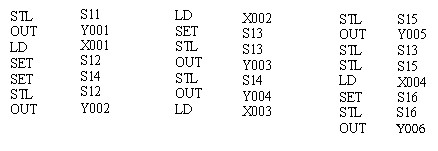
Hình 2.35. Phân nhánh AND và hợp nhánh trong lập trình STL