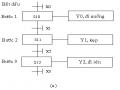
Sau khi đèn vàng Y0 tắt và còi báo Y1 ngừng, băng tải Y2 di chuyển về phía trước. Đèn xanh Y3 bật sáng trong khi băng tải Y2 hoạt động.
Khi nút nhấn STOP được nhấn trên bảng điều khiển, hoạt động trong bước 1 và bước 2 ngừng. Hoạt động được lập lại khi quá trình mô tả trong bước 1 được thi hành.
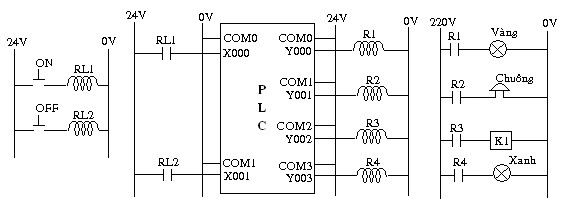
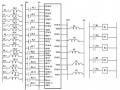
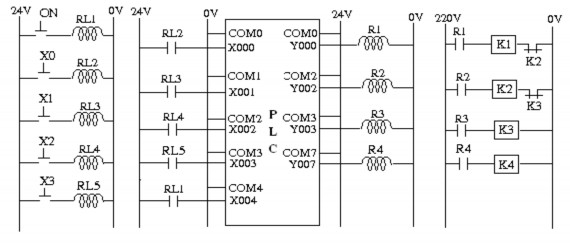
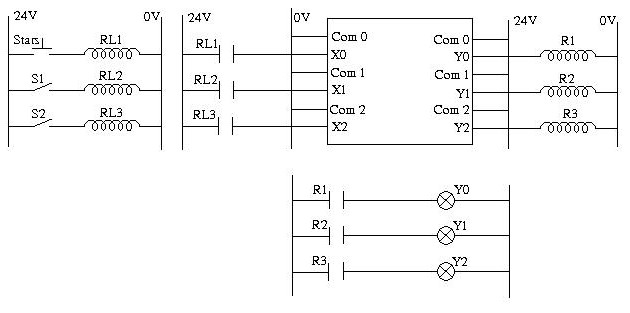
5. Sơ đồ nguyên lý:
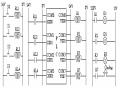
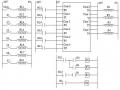
6. Chương trình Ladder mẫu:
Bài 6. Truyền động băng tải:
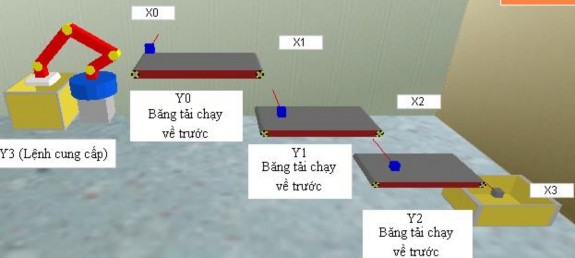
1. Mô hình hoạt động:
2. Bảng khai báo thiết bị:
Địa chỉ thiết bị | Tên thiết bị | Sự hoạt động | |
Ngõ vào | X0 | Cảm biến băng tải trên | ON khi phát hiện sản phẩm |
X1 | Cảm biến băng tải giữa | ON khi phát hiện sản phẩm | |
X2 | Cảm biến băng tải dưới | ON khi phát hiện sản phẩm | |
X3 | Cảm biến cuối | ON khi phát hiện sản phẩm | |
X4 | Nút nhấn ON | ON quá trình hoạt động | |
Ngõ ra | Y0 | Băng tải trên chạy về phía trước | Khi Y0 ON, băng tải di chuyển |
Y1 | Băng tải giữa chạy về phía trước | Khi Y1 ON, băng tải di chuyển | |
Y2 | Băng tải dưới chạy về phía trước | Khi Y2 ON, băng tải di chuyển |
Có thể bạn quan tâm!
-
 Cơ Chế Stepladder – (A): Mạch Cơ Bản Stl;
Cơ Chế Stepladder – (A): Mạch Cơ Bản Stl; -
 Các Bài Tập Dạng Cơ Bản: Bài 1. Đơn Vị Phục Vụ:
Các Bài Tập Dạng Cơ Bản: Bài 1. Đơn Vị Phục Vụ: -
 Hướng dẫn lập trình PLC Mitsubishi - 13
Hướng dẫn lập trình PLC Mitsubishi - 13 -
 Hướng dẫn lập trình PLC Mitsubishi - 15
Hướng dẫn lập trình PLC Mitsubishi - 15 -
 Các Bài Tập Dạng Nâng Cao Bài 1. Vận Hành Cửa Tự Động
Các Bài Tập Dạng Nâng Cao Bài 1. Vận Hành Cửa Tự Động -
 Hướng dẫn lập trình PLC Mitsubishi - 17
Hướng dẫn lập trình PLC Mitsubishi - 17
Xem toàn bộ 202 trang tài liệu này.
Y3 | Lệnh cung cấp | Một sản phẩm được cung cấp, một tiến trình bắt đầu |
3. Mục đích điều khiển:
Vận hành băng tải tùy theo tín hiệu cảm biến.
4. Những đặc tính điều khiển:
Khi nút nhấn ON được nhấn trên bảng điều khiển, lệnh cung cấp Y3 cho robot chuyển sang ON nếu robot đang ở vị trí bắt đầu. Khi thả nút nhấn ON, lệnh cung cấp Y3 được tự giữ cho đến khi robot quay trở về vị trí bắt đầu.
Khi cảm biến X0 phát hiện sản phẩm, băng tải trên chạy về phía trước, Y0 bật lên ON.
Khi cảm biến X1 phát hiện sản phẩm, băng tải giữa chạy về phía trước, Y1 bật lên ON và băng tải trên Y0 ngừng.
Khi cảm biến X2 phát hiện sản phẩm, băng tải dưới chạy về phía trước, Y2 bật lên ON và băng tải giữa Y1 ngừng.
Khi cảm biến X3 phát hiện sản phẩm, băng tải dưới Y2 ngừng.
Khi cảm biến X3 bật lên ON, lệnh cung cấp Y3 cho robot chuyển sang ON và một sản phẩm mới được cung cấp nếu robot đang ở vị trí bắt đầu.
5. Sơ đồ nguyên lý:
6. Chương trình Ladder mẫu:
II. Các bài tập dạng trung bình Bài 1. Tín hiệu nút nhấn
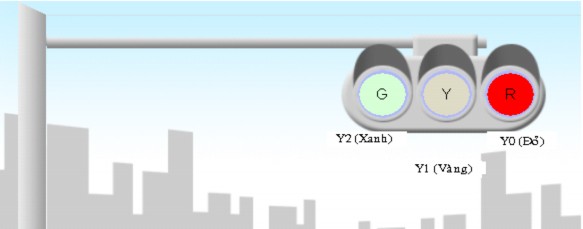
1. Mô hình hoạt động:
2. Bảng khai báo thiết bị:
Địa chỉ thiết bị | Tên thiết bị | Sự hoạt dộng | |
Ngõ ra | Y0 | Đèn đỏ | Sáng khi Y0 ON |
Y1 | Đèn vàng | Sáng khi Y1ON | |
Y2 | Đèn xanh | Sáng khi Y2 ON |
3. Mục đích điều khiển:
Chuyển đổi tín hiệu đèn giao thông từ 1 nút nhấn
4. Những đặc tính điều khiển:
- Đèn tín hiệu đỏ (Y0) nhấp nháy trong khoảng 1-2 giây (sáng trong 1s và tắt trong 1s).
- Khi nút nhấn X10 trên bảng điều khiển được nhấn , tín hiệu chỉ thị Y10 trên bản vận hành sẽ sáng. Nếu thả nút nhấn Y10, tín hiệu chỉ thị Y10 vẫn sáng .
- Sau khi tín hiệu chỉ thị Y10 sáng đươcï 5s, sự hoạt động các tín hiệu thay đổi như mô tả từ bước 4 đến bước 7 :
- Đầu tiên tín hiệu đỏ Y0 nhấp nháy trong 5s trong khi tín hiệu chỉ thị Y10 vẫn
sáng.
- Đèn tín hiệu đỏ Y0 tắt. Đèn tín hiệu vàng Y1 sáng trong 5s.
- Sau khi đèn tín hiệu vàng Y1 tắt, đèn tín hiệu xanh Y2 sáng trong 10s.
- Sau khi đèn tín hiệu xanh Y2 tắt, đèn tín hiệu đỏ Y0 nhấp nháy trong khoảng
1-2 giây (sáng trong 1s và tắt trong 1s). Sự hoạt động các tín hiệu lặ lại từ bước 1.
5. Sơ đồ nguyên lý:
6. Chương trình Ladder mẫu:
Bài 2. Phân loại sản phẩm theo kích cỡ (II)
1. Mô hình hoạt động:
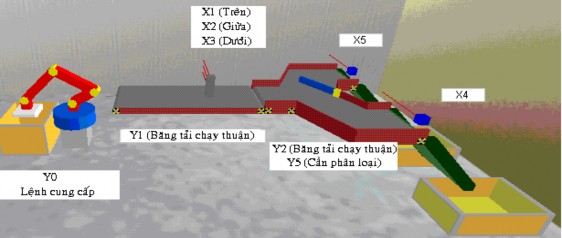
2. Bảng khai báo thiết bị:
Địa chỉ thiết bị | Tên thiết bị | Sự hoạt dộng | |
Ngõ vào | X0 | Điểm bắt đầứu | ON khi Robot ở vị trí xuất phát. |
X1 | Trên | ON khi sản phẩm kích cỡ lớn dược phát hiện. | |
X2 | Giữa | ON khi sản phẩm kích cỡ trung bình dược phát hiện. | |
X3 | Thấp | ON khi sản phẩm kích cỡ nhỏ dược phát hiện. | |
X4 | Cảm biến | ON khi sản phẩm được phát hiện ở cuối băng chuyền phải | |
X5 | Cảm biến | ON khi sản phẩm được phát hiện ở cuối băng chuyền phải | |
Ngõ ra | Y0 | Lệnh cung cấp | Một sản phẩm đươcù cung cấp khi Y0 là ON. Một tiến trỡnh bắt đầu theo thứ tự cỏc xilanh :lớn, nhỏ, nhỏ, lớn và nhỏ. |
Y1 | Băng tải chạy thuận (về phía trước) | Khi Y1 là ON _ băng tải di chuyển về phía trước. | |
Y2 | Băng tải chạy thuận (về phía trước) | Khi Y2 là ON _ băng tải di chuyển về phía trước. |
Y5 | Cần phân loại | Di chuyển ra phía trước khi Y5 là ON. |
3. Mục đích điều khiển:
Phân loại sản phẩm đến vị trí có kích cỡ tương ứng
4. Những đặc tính điều khiển:
- Khi công tắc X24 trên bảng điều khiển băng tải di chuyển về phía trước. Khi X24 trên bảng điều khiển đươcï chuyển sang OFF, các băng tải ngừng hoạt động.
- Khi nút nhấn X20 trên bảng điều khiển được nhấn, lệnh cung cấp sản phẩm Y0 cho robốt hoạt động.
Lệnh cung cấp sản phẩm Y0 được chuyển sang OFF khi robot dy chuyển khỏi điểm bắt đầu (robot sẽ hoàn thành chu trình gắp sản phẩm).
- Robot sẽ cung cấp các sản phẩm có kích cỡ lớn, trung bình hoặc nhỏ.
- Sản phẩm lớn được dẫn đến băng chuyền phía sau (đi qua cảm biến X5).
- Sản phẩm nhỏ được dẫn đến băng chuyền phía trước (đi qua cảm biến X4). Kích cỡ sản phẩm được nhận dạng bằng các tín hiệu Trên X1, Giữa X2, Thấp X3 được dặt trên băng chuyền.
5. Sơ đồ nguyên lý: