Ví dụ:
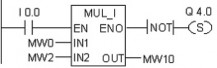
Hình 4.49. Ví dụ về chức năng của lệnh MUL_I
Khi ngõ vào I0.0=1 thì lệnh MUL-I hoạt động, kết quả của lệnh nhân MW0*MW2 được xuất ra ngõ MW10. Nếu kết quả nằm ngoài vùng hoạt động của số nguyên 16 Bit thì Q4.0=1.
3.2.8 LỆNH CHIA SỐ NGUYÊN 16 BIT (DIV-I_DIVIDE INTERGER)
Ký hiệu:
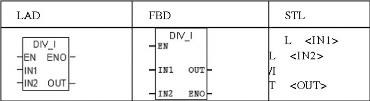
Hình 4.50. Thông số lệnh chia số học lấy số nguyên Hoạt động:
Khi trạng thái ngõ vào EN=1 thì lệnh DIV-I hoạt động, giá trị IN1 được chia bỡi giá trị IN2 và kết quả gửi ra ngõ ra OUT. Nếu kết quả vượt quá giới hạn cho phép của số nguyên 16 Bit thì bit OV và OS lên 1 và ENO=0, nên những chức năng khác mà được nối với ngõ ENO sẽ không hoạt động.
Ví dụ:
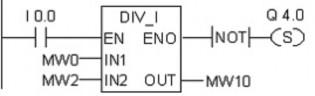
Hình 4.51. Chức năng lệnh DIV_I
Khi ngõ vào I0.0=1 thì lệnh DIV-I hoạt động, kết quả của lệnh chiaMW0 bởi MW2 được xuất ra ngõ MW10. Nếu kết quả nằm ngoài vùng hoạt động của số nguyên 16 Bit thì Q4.0=1.
3.2.9 LỆNH LẤY PHẦN DƯ CỦA PHÉP CHIA SỐ NGUYÊN KÉP 32 BIT (MOD-DI_RETURN FRACTION DOUBLE INTEGER)
Ký hiệu:
Hình 4.52. Thông số lệnh chia số học lấy số dư
Hoạt động:
Khi trạng thái ngõ vào EN=1 thì lệnh MOD-DI hoạt động, giá trị IN1 được chia bỡi giá trị IN2 và kết quả phần dư được gửi ra ngõ ra OUT. Nếu kết quả vượt quá giới hạn cho phép của số nguyên kép 32 Bit thì bit OV và OS lên 1 và ENO=0, nên những chức năng khác mà được nối với ngõ ENO sẽ không hoạt động.
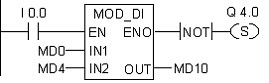
Ví dụ:
Khi ngõ vào I0.0=1 thì lệnh MOD-DI hoạt động, kết quả phần dư của lệnh chia MD0:MD4 được xuất ra ngõ MD10. Nếu kết quả nằm ngoài vùng hoạt động của số nguyên kép 32 Bit thì Q4.0=1.
BÀI 4: ỨNG DỤNG PLC ĐIỀU KHIỂN HỆ THỐNG
GIỚI THIỆU BÀI 4:
- Điều khiển hệ thống băng tài
- Điều khiển hệ thống khí nén
MỤC TIÊU CỦA BÀI 4 LÀ:
- Phân tích được quy trình công nghệ của hệ thống điều khiển bằng PLC
- Lập trình và vận hành được các hệ thống điều khiển bằng PLC
- Kết nối được thiết bị ngoại vi của các hệ thống với PLC
- Rèn luyện đức tính tích cưc, chủ đông và sáng taọ
PHƯƠNG PHÁP GIẢNG DẠY VÀ HỌC TẬP BÀI 4
- Đối với người dạy: sử dụng phương pháp giảng dạy tích cực (diễn giảng, vấn đáp, dạy học theo vấn đề); yêu cầu người học thực hiện câu hỏi thảo luận và bài tập bài1 (cá nhân hoặc nhóm).
- Đối với người học: chủ động đọc trước giáo trình (bài 1) trước buổi học; hoàn thành đầy đủ câu hỏi thảo luận và bài tập tình huống bài 1 theo cá nhân hoặc nhóm và nộp lại cho người dạy đúng thời gian quy định.
ĐIỀU KIỆN THỰC HIỆN BÀI 4
- Phòng học chuyên môn hóa/nhà xưởng: Phòng học thực hành điện – điện tử
- Trang thiết bị máy móc: Máy chiếu và các thiết bị dạy học khác
- Học liệu, dụng cụ, nguyên vật liệu: Chương trình môn học, giáo trình, tài liệu tham khảo, giáo án, phim ảnh, và các tài liệu liên quan, các loại trang thiết bị bảo hộ cá nhân: giày cách điện, gang tay cách điện.
- Các điều kiện khác: không có
KIỂM TRA VÀ ĐÁNH GIÁ BÀI 4
Nội dung:
- Kiến thức: Kiểm tra và đánh giá tất cả nội dung đã nêu trong mục tiêu kiến thức
- Kỹ năng: Đánh giá tất cả nội dung đã nêu trong mục tiêu kĩ năng.
- Năng lực tự chủ và trách nhiệm: Trong quá trình học tập, người học cần:
- Nghiên cứu bài trước khi đến lớp
+ Chuẩn bị đầy đủ tài liệu học tập.
+ Tham gia đầy đủ thời lượng môn học.
+ Nghiêm túc trong quá trình học tập.
Phương pháp:
- Kiểm tra định kỳ lý thuyết: 01 điểm kiểm tra (hình thức: kiểm tra trắc nghiệm, thời gian 45 ÷ 60 phút)
- Kiểm tra định kỳ thực hành: 01 điểm kiểm tra (hình thức: Viết chương trình điều khiển máy giặt – lắp ráp hoàn chỉnh sơ đồ nguyên lý, sơ đồ điều khiển, kết nối với PLC)
4.1 ĐIỀU KHIỂN ĐÈN GIAO THÔNG
4.1.1 Yêu cầu kỹ thuật:
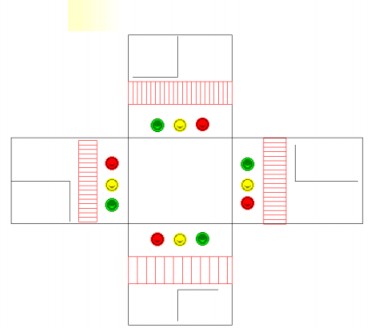
Hình 5.1. Mô hình đồ họa mô phỏng hệ thống điều khiển đèn giao thông
Yêu cầu: Đèn đỏ 30 giây, đèn xanh 25 giây, đèn vàng 5 giây. Hệ thống phải có nút Start và Stop
Viết chương trình điều khiển, tạo giao diện giám sát và điều khiển trên màn hình HMI
4.1.2 Quy trình thực hành:
Bước 1: Chuẩn bị vật tư, thiết bị
- Hệ thống các trạm PLC
- Máy tính
- Đồng hồ VOM
Bước 2: Lập bảng địa chỉ ngõ vào ra và viết chương trình điều khiển Bước 3: Tạo giao diện giám sát và điều khiển trên màn hình HMI Bước 4: Dowload, vận hành và khắc phục sự cố
4.1.3 Kết quả thực hành:
Lập bảng địa chỉ:
Bảng 5.1. Định địa chỉ các ngõ vào ra bài điều khiển đèn giao thông
Ngõ ra | |||
Tên | Địa chỉ | Tên | Địa chỉ |
Có thể bạn quan tâm!
-

 Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 5
Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 5 -
 Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 6
Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 6 -
 Lệnh Trừ Số Nguyên 16 Bit (Sub-I _Subtract Interger)
Lệnh Trừ Số Nguyên 16 Bit (Sub-I _Subtract Interger) -
 Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 9
Hệ thống PLC Nghề Điện công nghiệp - Trình độ Cao đẳng - Trường Cao Đẳng Dầu Khí năm 2020 - 9
Xem toàn bộ 79 trang tài liệu này.
Viết chương trình điều khiển:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
4.1.4 Tiêu chí đánh giá: Thang điểm 10
Bảng 5.2. Bảng thang điểm chấm bài đèn giao thông
Nội dung | Điểm | Ghi chú | |
1 | Lập bảng địa chỉ | 2 | |
2 | Viết chương trình | 4 |
Nội dung | Điểm | Ghi chú | |
3 | Tạo giao diện giám sát và điều khiển trên màn hình HMI | 3 | |
4 | Vệ sinh công nghiệp | 1 |
TT
4.2 ĐIỀU KHIỂN HỆ THỐNG KHÍ NÉN
4.2.1 Các phần tử trong hệ thống khí nén
a. Cơ cấu chấp hành:
- Cơ cấu chấp hành có nhiệm vụ biến đổi năng lượng khí nén thành năng lượng cơ học. Cơ cấu chấp hành có thể chuyển động thẳng (xy lanh) hoặc chuyển động quay (động cơ khí nén).
- Cơ cấu chấp hành chuyển động thẳng:
Xy lanh tác động đơn (xy lanh tác động 1 chiều):

Lò xo
Cần piston
Cửa khí vào/ra
Hình 5.2. Xy lanh tác động kép
Cửa khí vào/ra Cửa khí vào/ra

Hình 5.3. Cơ cấu chấp hành chuyển động tịnh tiến
- Cơ cấu chấp hành chuyển động quay:
Động cơ quay vòng
Động cơ quay nữa vòng
Hình 5.4. Cơ cấu chấp hành chuyển động quay
b. Các phần tử điều khiển điện – khí nén:
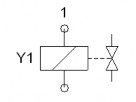
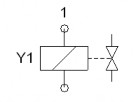
- Van điện từ 3/2 không duy trì
2
Y1
1 3
Hình 5.5. Van điện từ 3/2 không duy trì
- Van điện từ 5/2 không duy trì
4 2
Y1
5 3
Hình 5.6. Van điện từ 5/2 không duy trì
- Van điện từ 3/2 duy trì
2
Y1 Y2
1 3
Hình 5.7. Van điện từ 3/2 duy trì
- Van điện từ 5/2 duy trì
4 2
Y1 Y2
5 3
Hình 5.8. Van điện từ 5/2 duy trì
K1
K1
- Relay
4
K1
1 2 Chân chung
Hình 5.9. Relay
Ví dụ:Cho hệ thống in nhãn chi tiết bán tự động như hình 3.11
Pittông của xy lanh A và B ban đầu ở phía trong. Nhấn START pittông của xy lanh A đẩy chi tiết đi ra, đến cuối hành trình pittông của xy lanh B đi xuống để in nhãn chi tiết sau đó pittông của xy lanh B quay về. Cuối cùng pittông của xy lanh A quay về. Chi tiết được lấy ra bằng tay.
Điều khiển hệ thống dùng PLC
Hình 5.10. Mô hình hệ thống in nhãn bán tự động
Bài làm:
T1
T2
Bước 1: Vẽ sơ đồ hành trình bước
+ A
-
S2
S1 S1
T1 S2
A+ B+
S4
E1 = S1 E2 = S4 A+ = T1
B+ =
+ S4
B
- S3
A- B-
S3 T2
T1^S2
B- = T2